







 人形机器人行业快速发展,市场空间巨大,关节中的减速器与丝杠成为关注焦点。谐波减速器与行星减速器在旋转关节中发挥关键作用,而丝杠则用于线性关节。随着技术进步,核心零部件国产替代趋势明显,有望降低成本,推动人形机器人放量。特斯拉Optimus、优必选Walker X等机器人逐步商业化,未来将广泛应用于工业、服务和军事等领域。
人形机器人行业快速发展,市场空间巨大,关节中的减速器与丝杠成为关注焦点。谐波减速器与行星减速器在旋转关节中发挥关键作用,而丝杠则用于线性关节。随着技术进步,核心零部件国产替代趋势明显,有望降低成本,推动人形机器人放量。特斯拉Optimus、优必选Walker X等机器人逐步商业化,未来将广泛应用于工业、服务和军事等领域。
今天分享的是人形机器人系列深度研究报告:《人形机器人行业深度报告:人形机器人星火燎原各零部件国产替代前景广阔》。
——————
人形机器人硬件:关节成本占比高,重点关注减速器与丝杠环节。人形机器人 的关节包括旋转关节和线性关节,成本占比约 58%。关节中除传感器与电机外, 旋转/线性关节中的核心零部件分别为减速器和丝杠,两部分在机器人整机的成 本占比约为 7.4%/6.4%,假设目前使用的减速器、丝杠数量与类型不变,预计 到 2030 年全球市场空间分别为 1317/1164 亿元,CAGR 分别为 105%/108%。 谐波减速器壁垒有加工工艺、齿形设计等,22 年谐波减速器国内市场国产化率 44%,仍有进口替代空间,壁垒高竞争格局好。丝杠是线性关节的核心部件,目前主要依赖国外进口,壁垒主要为原材料、加工与制造能力等,进口替代空间大。
——————
(报告出品方:西部证券)
报告共计:72页
一、人形机器人蓄势待发,市场空间广阔
1.1 人形机器人发展近半个世纪,科技赋能实现新突破
人形机器人起步于 20 世纪 70 年代,技术持续选代。人形机器人指具有人的形态和功能的机器人,其发展主要分四个阶段:
1)初步行走阶段: 以日本早稻田大学打造的 WABOT-为代表;
2)能力破冰阶段: 以本田人形机器人等为代表的系统高度集成时代;
3) 技术突破阶段: 以强复合运动能力为特征的,突出代表者为波士顿动力 Atlas;
4) 产业化落地阶段: 第四阶段是以特斯拉 Optimus 机器人为代表,该阶段尚处于发展前期。大体上看,人形机器人经历了由缓慢静态运动到连续动态运动再到高动态性能的迭代过程,朝着高度集成、感知环境、运动自如、精细操作、产业量化的方向迈进。

科技赋能发展,人形机器人有望成为“具身智能”的理想载体。具身智能是指一种智能系统或机器能够通过感知和交互与环境进行实时互动的能力。随着全球高新技术尤其是 AI领域的整体快速突破,以 ChatGPT 为代表的大模型将进一步优化对人形机器人的控制技术,为人形机器人装上“大脑”,使其顺畅地与外界交互,并增加任务理解、拆分和逻辑推理等“决策"能力,由此人形机器人有望成为“具身智能”的理想形态。
1.2 新型人形机器人百花齐放,中国市场蓄势待发
人形机器人领域多点开花,中国市场蓄势待发。目前国外主要人形机器人包括 Atlas、Diqit.Optimus 等,其中 Atlas 以较强的运动能力闻名: Diqit 主攻物流服务领域,应用于工厂:Optimus 是特斯拉推出的人形机器人,于 2021 年推出概念机,是目前人形机器人最前沿的代表之一。中国对人形机器人的探索起步虽晚却发展迅速,优必选、小米已分别推出Walker X和 CyberOne 机器人,其中Walker X 已初步实现商业化。2023 年,傅利叶智能、宇树科技、纯米科技、小鹏等多家厂商推出人形机器人原机,商业化进程加快。

1.2.1 波士顿动力/Atlas:运动控制领城翘楚
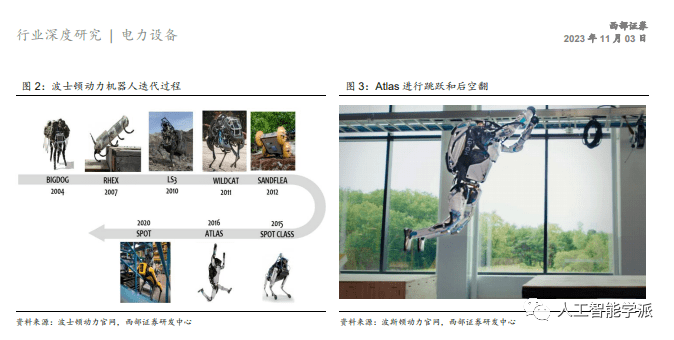
20 最机器人制造经验,运动控制领城翘楚。波士顿动力长期专注于制造具有先进机动性、灵活性和智能性的机器人。2004 年,波士顿动力开发出第一台在实验室以外行走的腿足式机器人BIGDOG,此后又开发了RHEX、SANDFLEA、LS3、WILDCAT、SPOTCLASSICHANDLE、Atlas 多个机器人,在运动控制领域优势明显。
运动能力远超同行,成本高昂尚未实现商业化。Atlas 利用最先进的控制系统和硬件为机器人提供了力量和平衡,利用算法使涉及整个身体和环境的复杂动态相互作用以规划运动目前 Atlas 已经能做到后空翻、跳舞等高难度动作,在运动性能方面优势显著。Atlas 采用液压驱动和定制电池,同时使用铁和铝 3D 打印部件的混合物,成本较高,因此仍然停留在实验室阶段,尚未实现商业化。
1.2.2 Agility Robotics/Digit:为工作而生,主攻物流领城
Digit是 Agility Robotics 公司开发的多用途物流机器人,主要在仓库场景中使用。Digit一天能工作 16 个小时,拥有自动充电功能,其工作不需要复杂的改造或操作。同时,Digit的膝盖可以向后弯曲,上半身可以旋转,在拿取物品时更加稳定,这些特性使得 Digit 适宜在工作场景中辅助工人生产。目前,Digit 可以为人类移动手提袋或包裹,下一步将开发卸载装车和送货功能。
Digit 有望进一步在物流领域渗造。2022年4月,亚马逊投资 10 亿美元创立基金,以刺激供应链和物流创新,公司成为首批被纳入该基金的公司之一。23 年9 月,公司宣布设立了全球首家人形机器人工厂 RoboFab 用于制造 Diqit,占地 7万平方英尺,产能约每年10000 台。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









