







 本文详细分析了特斯拉Optimus人形机器人的快速迭代,强调了大模型在算法、算力和泛化能力上的关键作用。文章还比较了液压驱动与电驱方案的优劣,并指出国内厂商在大模型和具身智能领域的积极进展。
本文详细分析了特斯拉Optimus人形机器人的快速迭代,强调了大模型在算法、算力和泛化能力上的关键作用。文章还比较了液压驱动与电驱方案的优劣,并指出国内厂商在大模型和具身智能领域的积极进展。
今天分享的是人形机器人系列深度研究报告:《人形机器人专题:人形机器人产品方案对比,百花齐放,各擅胜场》。
(报告出品方:国泰君安证券)
报告共计:25页
来源:人工智能学派
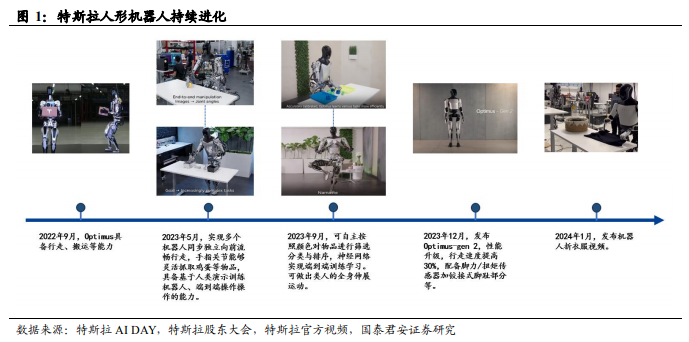
特斯拉人形机器人迭代迅速,从执行层到控制层进化明显
特斯拉机器人产品迭代迅速,产品性能进步明显。2021 年 8 月,在特斯 拉 AI DAY 上,马斯克公布人形机器人初步设计方案,仅 1 年后,Optimus 实现了从概念到整机的落地,已具备了行走、拾取、搬运等能力;2023 年 5 月,发布的视频中,机器人可以实现多个机器人同步独立向前流畅 行走,手指关节能够灵活抓取鸡蛋等物品,已具备了电机扭矩控制、环 境感知与记忆、基于人类演示训练机器人、端到端操作操作的能力;2023 年 9 月,Optimus 的视觉感知能力提升明显,可通过视觉与关节位置编 码器,在空间中精确定位四肢,能够自我校准手臂和腿,同时可自主按 照颜色对物品进行筛选分类与排序,神经网络实现端到端训练学习。此 外,机器人手部抓取与全身平衡表现亮眼,可通过手指灵活抓取物品并 放置指定位置,同时可做出类人的全身伸展运动,包括瑜伽单腿站立并 保持平衡。2023 年 12 月特斯拉发布 Optimus-Gen 2,较一代相比,二代 不论是在性能还是设计上,均有更大创新和提升。
Optimus-Gen 2 较一代产品性能提升明显,传感器和执行器优化显著。 从特斯拉发布的最新视频可以看到:1)该版本的机器人配备了特斯拉 设计的执行器和传感器,更加精致美观;2)2 个自由度的颈部执行器; 3)执行器集成电子线束,行走速度提高 30%,重量减轻 10 公斤;4) 脚力/扭矩传感器(预计为六维力传感器),并且搭配铰接式脚趾部分, 足部形态更加接近人体的足部形态;5)手部为 11 个自由度的灵巧手, 更快更灵活,所有手指都有触觉感应,能更精确的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









