







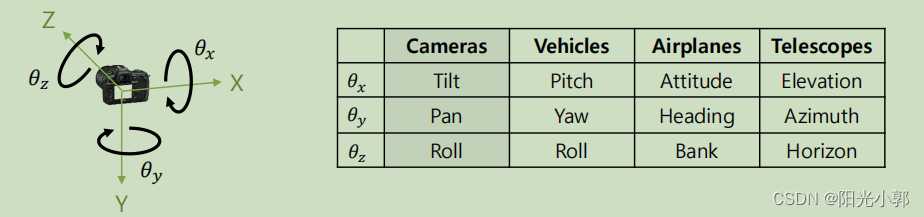
1. 单个相机
旋转的定义
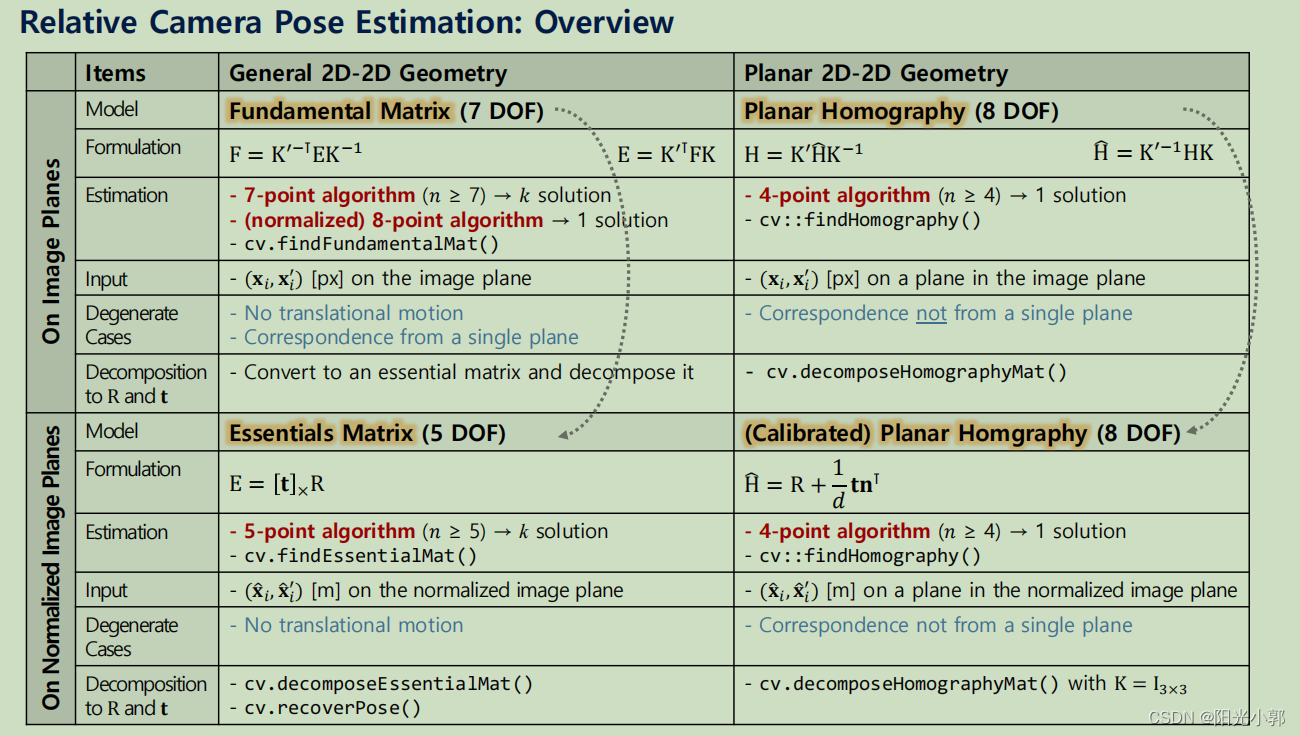
2. 两个相机几何
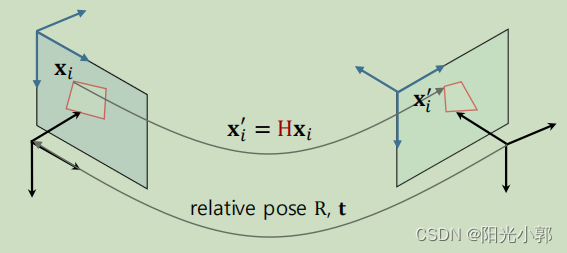
2.1 平面单应性
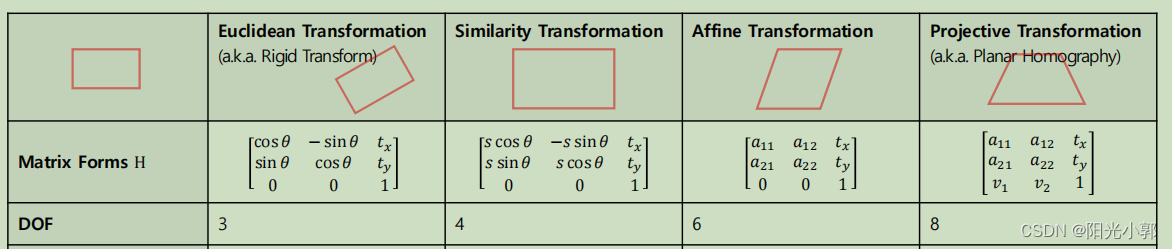
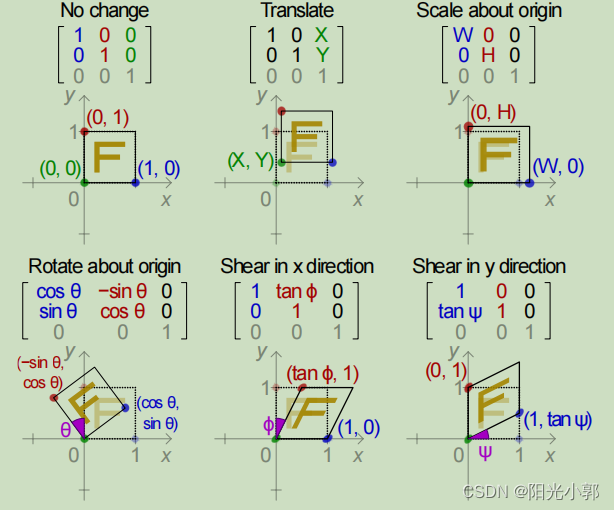
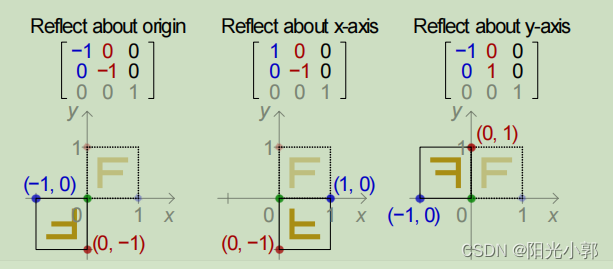
仿射变换
已知2d点的对应关系()...(
)
求解 Planar homography H (8 DOF) ?
opencv: cv.getPerspectiveTransform(); cv.findHomography()需要4组点;
cv.decomposeHomographyMat() with camera matrix ---> R,t
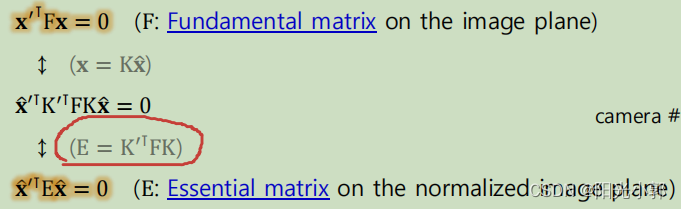
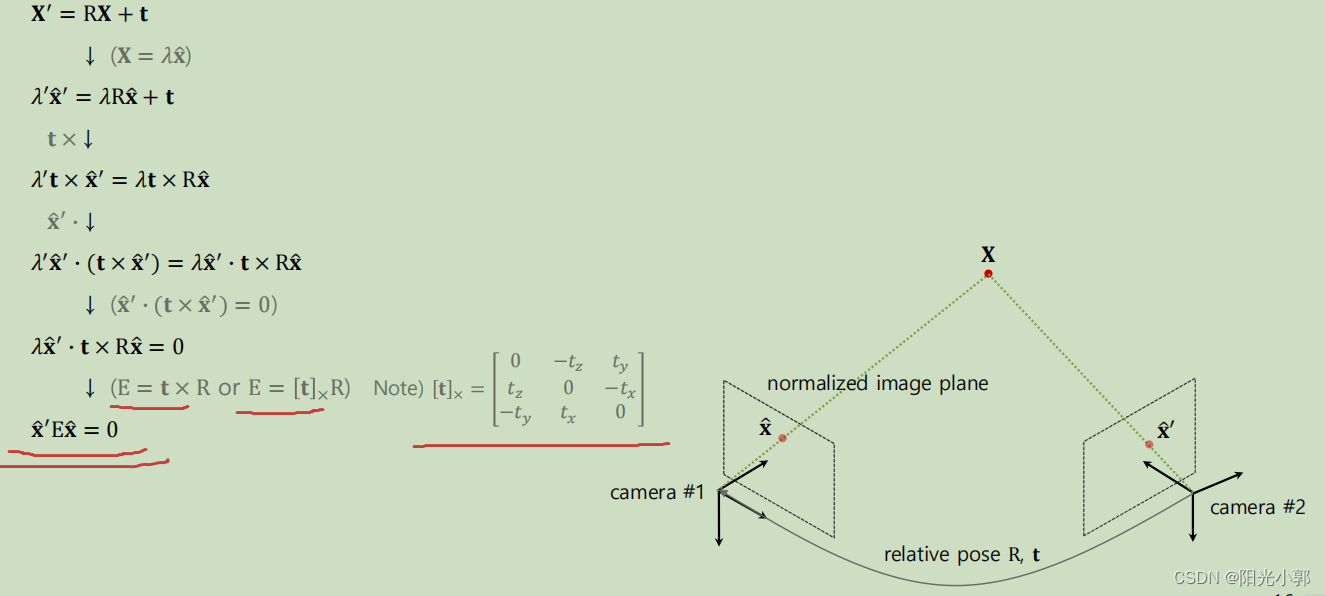
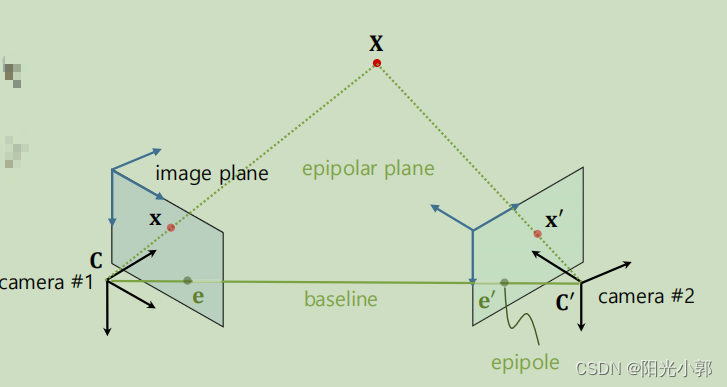
2.2 对极几何 Epipolar Geometry
极线约束
Baseline:基线两个相机中心的距离; EpipolarPlane:极平面,X, C, 形成的平面 ;极点:相机中心的投射点;
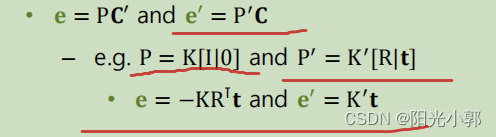
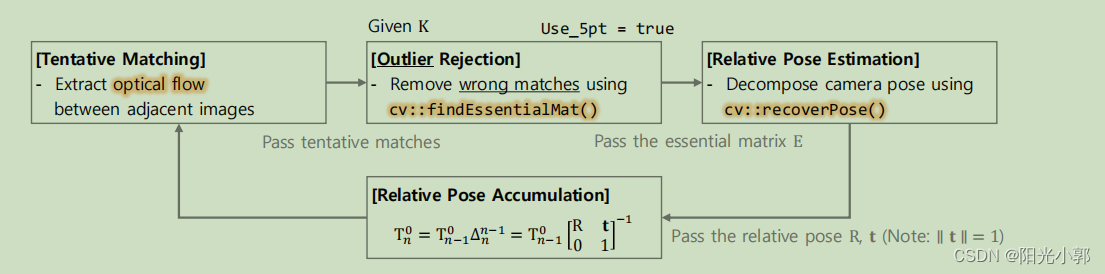
Relative Camera Pose Estimation
Triangulation 三角化
Direct Linear Transforms (DLT)
def DLT(P1, P2, point1, point2):
A = [point1[1]*P1[2,:] - P1[1,:],
P1[0,:] - point1[0]*P1[2,:],
point2[1]*P2[2,:] - P2[1,:],
P2[0,:] - point2[0]*P2[2,:]
]
A = np.array(A).reshape((4,4))
#print('A: ')
#print(A)
B = A.transpose() @ A
from scipy import linalg
U, s, Vh = linalg.svd(B, full_matrices = False)
print('Triangulated point: ')
print(Vh[3,0:3]/Vh[3,3])
return Vh[3,0:3]/Vh[3,3]














 259
259

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









