






5种机器人路径规划算法 A星 D星 Floyd RRT LPA算法 自定义栅格 Matlab算法
可自行更改绘制栅格地图,自定义起始点目标点位置、未知障碍物位置
matlab实现
详细注释!
ID:859721927466764
马三拉蒂
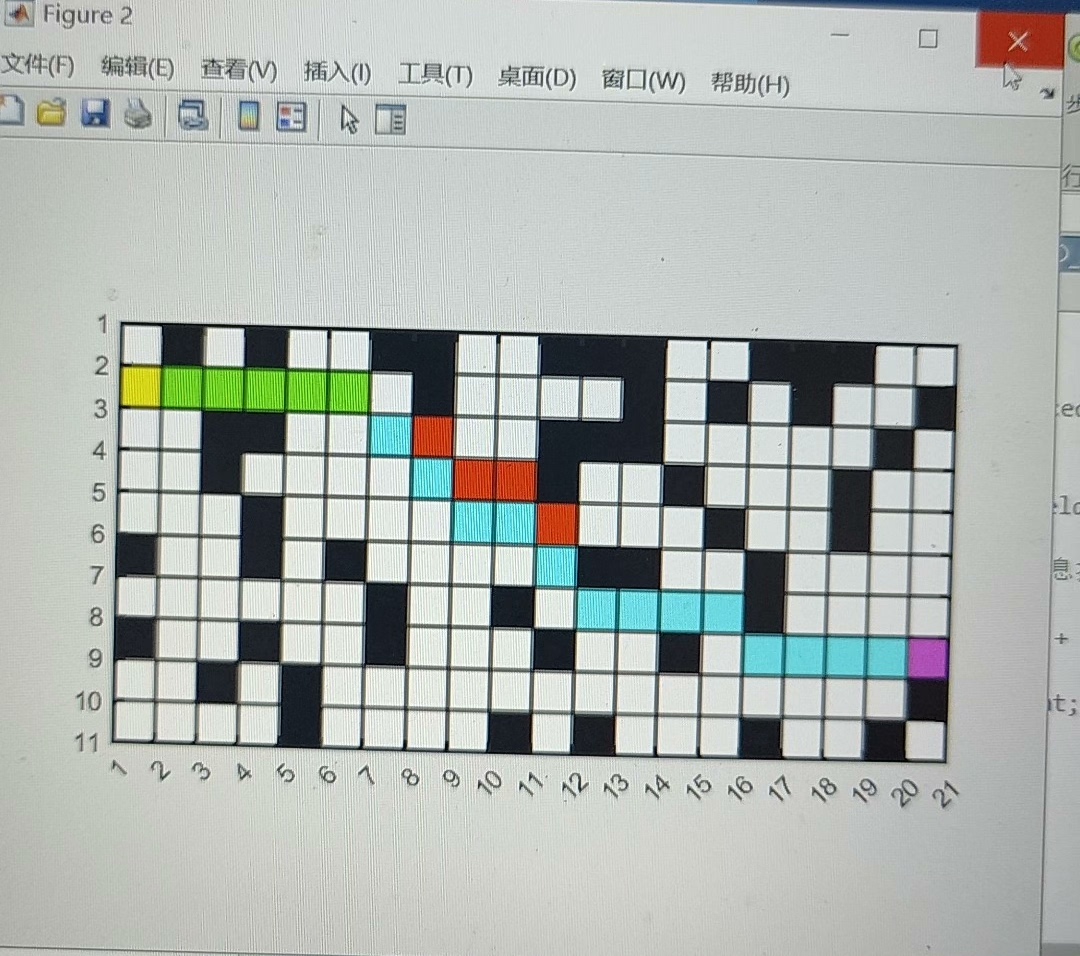

机器人路径规划是机器人导航领域的核心问题之一。在实际应用中,机器人需要根据场景的不同,选择合适的路径规划算法来实现自主导航。本文将介绍5种主流的机器人路径规划算法,包括A星算法、D星算法、Floyd算法、RRT算法以及LPA算法,并且结合Matlab软件进行实现。同时,我们还提供了自定义栅格地图、起始点、目标点以及未知障碍物位置的功能,并对实现代码进行了详细注释。
首先,我们来介绍A星算法。A星算法是一种基于图搜索的启发式算法,常用于解决路径规划问题。该算法通过维护两个列表,分别是开放列表和关闭列表,来不断扩展搜索空间,直到找到最优路径。A星算法使用启发函数来估计当前节点到目标节点的代价,并选择具有最小代价的节点进行搜索。该算法具有快速收敛、高效性和较好的最优化性能。
其次,我们介绍D星算法。D星算法是一种基于A星算法的改进方法,主要针对动态环境中的机器人路径规划问题。D星算法通过引入偏移函数来实时更新地图信息,从而应对动态环境的变化。该算法在A星算法的基础上进行了优化,能够实时地更新节点之间的代价和启发式函数值,从而更好地适应动态环境。
接下来,我们介绍Floyd算法。Floyd算法是一种经典的图最短路径算法,主要用于解决图中任意两点之间的最短路径问题。该算法通过动态规划的思想,逐步更新节点之间的最短路径长度,最终得到整个图的最短路径矩阵。Floyd算法具有简单直观、时间复杂度低的优点,适用于小规模的路径规划问题。
然后,我们介绍RRT算法。RRT算法是一种概率路径规划算法,主要用于解决高维、复杂环境下的路径规划问题。该算法通过随机采样和树形结构的构建,不断探索搜索空间,直到找到满足条件的路径。RRT算法具有高效性和适应性的优点,能够在复杂环境中找到可行的路径。
最后,我们介绍LPA算法。LPA算法是一种基于动态规划的路径规划算法,主要用于解决具有时间约束的路径规划问题。该算法通过维护两个优先队列,分别是Open列表和Close列表,来不断更新节点之间的最小路径代价,并在满足时间约束条件下选择最优路径。LPA算法具有较好的时间约束性能和高效性,适用于具有时间限制的路径规划问题。
在实现过程中,我们使用Matlab软件来进行算法的实现。Matlab作为一种强大的科学计算工具,提供了丰富的函数库和易于使用的界面,方便我们进行路径规划算法的实现和测试。我们通过自定义栅格地图、起始点、目标点以及未知障碍物位置等参数,可以灵活地调整算法的输入,以适应不同的场景需求。
最后,我们对实现的代码进行了详细注释。注释可以使代码更加易读易懂,并且能够帮助其他开发人员快速理解和使用我们的代码。通过详细注释,我们可以对算法的核心思想、关键步骤以及参数设置进行解释,方便其他人理解和使用我们的实现。
总之,本文介绍了5种常用的机器人路径规划算法,包括A星算法
以上相关代码,程序地址:http://wekup.cn/721927466764.html















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









