






上文中我们已经设计得到非线性状态观测器,能够对二阶系统中状态量进行很好的跟踪,进一步的如果我们将作用域开环系统的作用力项看作新的状态变量,那就可以得到新的扩张方程
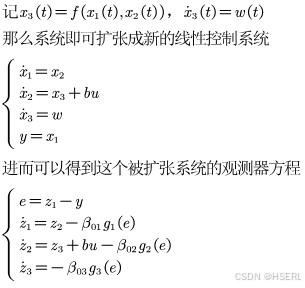
此时观测器不仅可以估计系统的状态变量,同时也能够估计对系统的作用力,新的状态量就是扩张状态,对于实际系统,通常模型参数并不是完全未知,作用力除了模型的未知部分还有外界的扰动力,故实时作用量可以表示成
![]()
当我们将观测量从输出控制量中减去,就可以改变对象特性

当部分系统模型已知的时候
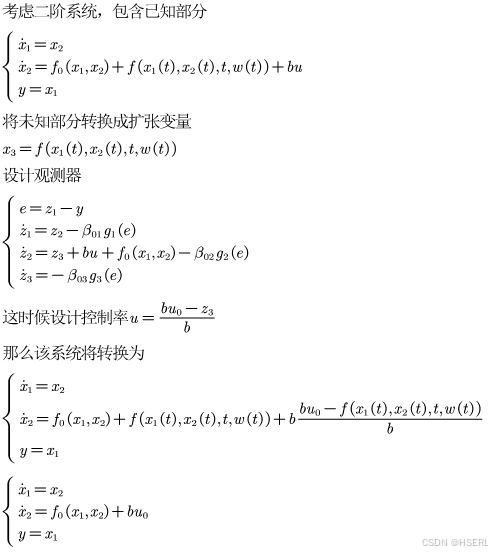
采用扩张观测器,一方面能够感知系统受到的扰动并采用反力补偿,一方面能够进行模型调制,将未建模动态通过观测器反馈抵消。
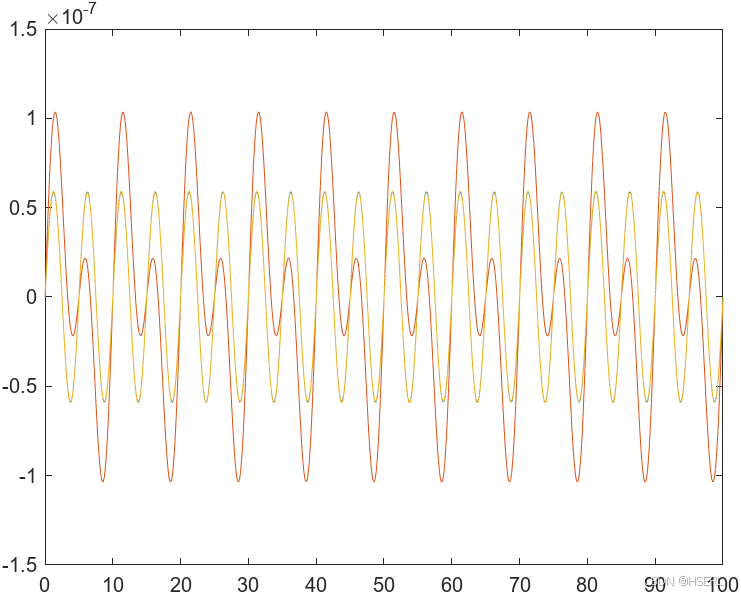
加入扩张观测器后,外界的谐波扰动被感知并抵消,最终的输出中外界扰动引起的响应几乎被抵消。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









