






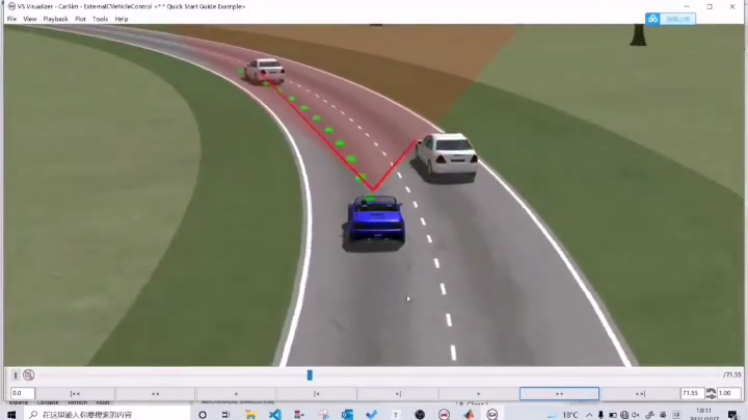
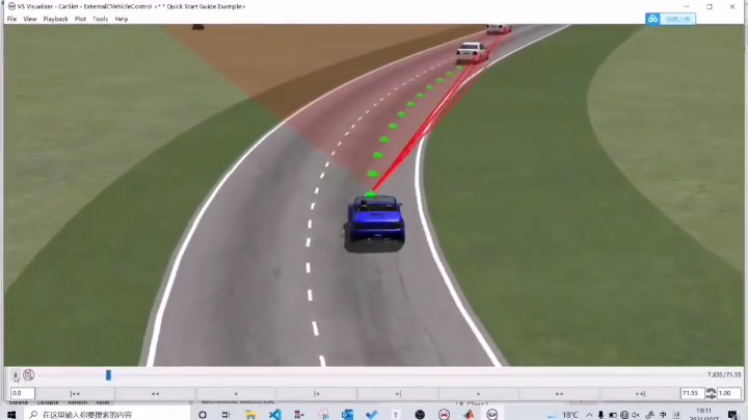
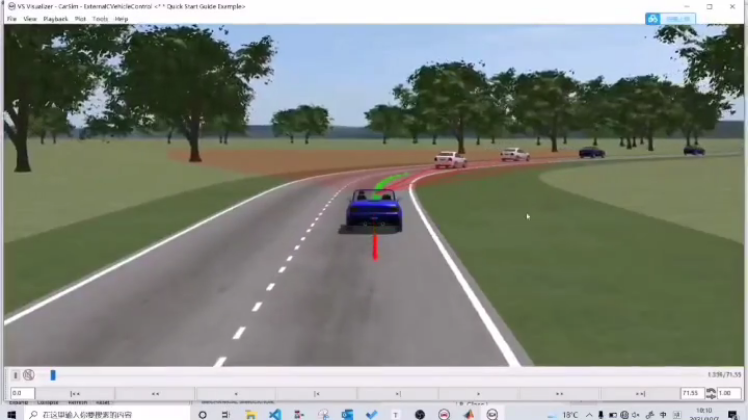
CarSim与Simulink联合仿真,实时检测,动态规划路径,实现超车换道,基于mpc,模型预测控制实现,距离效果见视频
提供carsim参数配置文件,导入即可运行
提供simulink模型文件
提供运行指导视频
提供模型说明文档
ID:12300675337052008
多不多啦米
标题:基于CarSim与Simulink联合仿真的动态路径规划与超车换道实现
摘要:本文将介绍CarSim与Simulink联合仿真技术的应用,以及如何利用动态规划路径来实现车辆的超车换道功能。文章将详细讲解基于MPC(模型预测控制)的路径规划方法,并提供相关的参数配置文件、Simulink模型文件、运行指导视频以及模型说明文档。
引言:
在智能交通系统的发展中,通过动态规划路径实现车辆的超车换道功能具有重要意义。本文介绍了一种基于CarSim与Simulink联合仿真的方法,该方法可以实时检测交通环境并动态规划车辆的路径,从而实现安全可靠的超车换道。
-
CarSim与Simulink联合仿真技术
1.1 CarSim简介
CarSim是一种基于物理建模的车辆动力学仿真工具,可以对车辆的行驶状态进行精确的模拟,包括车辆的加速度、速度、姿态等参数。
1.2 Simulink简介
Simulink是一种基于模型的设计和仿真工具,可以用于设计和验证各种控制系统,包括车辆控制系统。
1.3 CarSim与Simulink联合仿真的优势
将CarSim与Simulink联合使用,可以充分发挥两者的优势,实现更加精确的车辆动力学建模和控制系统设计。 -
动态规划路径的基本原理
2.1 动态规划简介
动态规划是一种以最优化原理为基础的求解问题的方法,通过将问题划分为多个子问题,并基于子问题的最优解来求解整个问题的最优解。
2.2 动态规划在路径规划中的应用
在车辆路径规划中,动态规划可以通过预测车辆未来的状态变化来选择最优路径,从而实现高效且安全的车辆运行。 -
超车换道功能的实现方法
3.1 基于MPC的路径规划
MPC(模型预测控制)是一种基于动态模型的控制方法,可以通过对未来状态的预测来计算最优的控制策略。在超车换道功能中,基于MPC的路径规划可以通过动态模拟当前交通环境和车辆状态,预测未来的路径并选择最优路径。
3.2 实时检测与动态规划
为了实现实时的超车换道功能,需要对交通环境进行实时检测,并基于实时检测结果进行动态规划。通过结合CarSim和Simulink的联合仿真技术,可以实现实时的检测与规划,并动态调整车辆行驶路径。 -
实验结果与验证
本文提供了相关的参数配置文件、Simulink模型文件以及运行指导视频,读者可以根据提供的文件和视频进行实验,验证超车换道功能的实现效果。此外,还提供了详细的模型说明文档,供读者深入了解该方法的原理和实现细节。
结论:
本文介绍了基于CarSim与Simulink联合仿真的动态路径规划与超车换道实现方法。通过动态规划路径和基于MPC的控制策略,可以实现高效且安全的车辆超车换道功能。本文还提供了相关的参数配置文件、Simulink模型文件、运行指导视频以及模型说明文档,读者可以参考这些资料进行实验和验证。该方法在智能交通系统中具有重要的应用价值,可以提高交通流量的效率和道路的安全性。
以上相关代码,程序地址:http://coupd.cn/675337052008.html
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









