






 本文详细介绍了MATLAB中RRT和RRT*算法的基本步骤,包括起点扩展、随机点生成、路径搜索与优化,以及它们在机器人路径规划中的应用。RRT算法通过随机扩展和最优化策略提升搜索效率,RRT*则进一步改进了路径质量。
本文详细介绍了MATLAB中RRT和RRT*算法的基本步骤,包括起点扩展、随机点生成、路径搜索与优化,以及它们在机器人路径规划中的应用。RRT算法通过随机扩展和最优化策略提升搜索效率,RRT*则进一步改进了路径质量。
MATLAB路径规划RRT RRT*算法
RRT 的基本步骤是:
1. 起点作为一颗种子,从它开始生长枝丫;
2. 在机器人的“构型”空间中,生成一个随机点 ;
3. 在树上找到距离 最近的那个点,记为 吧;
4. 朝着 的方向生长,如果没有碰到障碍物就把生长后的树枝和端点添加到树上,返回 2;
ID:3850675322233664
齐天真hh
MATLAB路径规划RRT RRT*算法
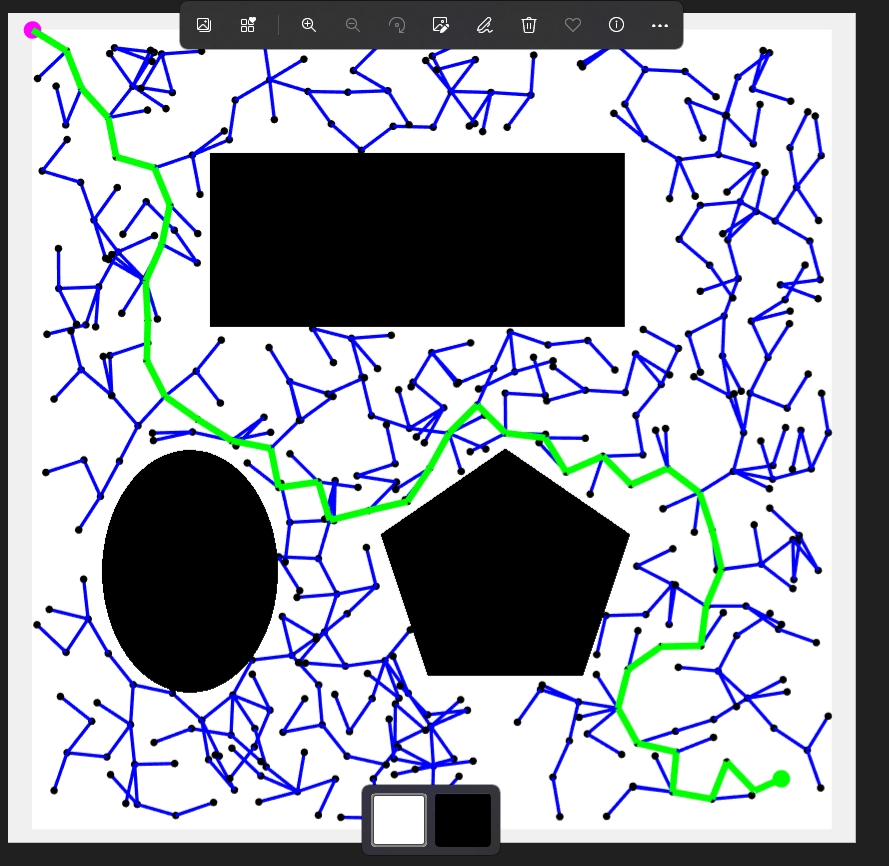
路径规划是机器人领域中的重要研究内容之一,它旨在找到机器人从起点到终点的最优路径。而Rapidly-exploring Random Trees(RRT)算法和其改进算法RRT是一种被广泛应用于路径规划的方法。本文将围绕RRT和RRT算法展开,解释其基本步骤和原理,以及其在机器人路径规划中的优势。
RRT算法的基本步骤如下:
-
起点作为一颗种子,从它开始生长枝丫。RRT算法以起点为种子,构建一棵树状结构。这颗树包含了从起点到其他点的所有可能路径。
-
在机器人的“构型”空间中,生成一个随机点。构型空间是指机器人在运动过程中的可能姿态集合。通过随机生成一个构型点,RRT算法可以扩展树的枝丫,寻找更多的路径。
-
在树上找到距离最近的那个点,记为Q_nearest。RRT算法通过计算构型空间中每个点与随机点的距离,找到最接近随机点的节点。
-
朝着Q_nearest的方向生长,如果没有碰到障碍物就把生长后的树枝和端点添加到树上,返回步骤2。RRT算法通过将树扩展到随机点所在的位置,不断生成新的树枝,直到找到终点或达到指定的搜索次数。
RRT算法的关键之处在于通过随机生成构型点和树的扩展来搜索可能的路径。由于RRT算法的随机性,它可以应用于各种不同的环境和机器人运动需求。然而,RRT算法也存在一些缺点,比如收敛速度较慢,可能会生成不符合规划要求的路径。
为了改进RRT算法的性能,RRT算法应运而生。RRT算法在RRT算法的基础上,引入了最优化策略和重连操作,以提高路径搜索的效率和路径的质量。RRT算法以最短距离和最小路径代价为目标,通过重连已有路径和重新选择最优节点等操作,不断优化树的结构。这使得RRT算法在路径规划中更容易找到最佳路径。
总之,RRT和RRT算法是一种有效的路径规划方法,可以应用于机器人领域中的路径搜索和规划需求。RRT算法通过随机扩展树的方式,搜索可能的路径;而RRT算法在此基础上引入最优化策略,提高路径的质量和搜索效率。这两种算法在工程实践中具有广泛的应用前景,可以为机器人路径规划提供有效的解决方案。
以上相关代码,程序地址:http://coupd.cn/675322233664.html















 617
617











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









