







一、功能简介
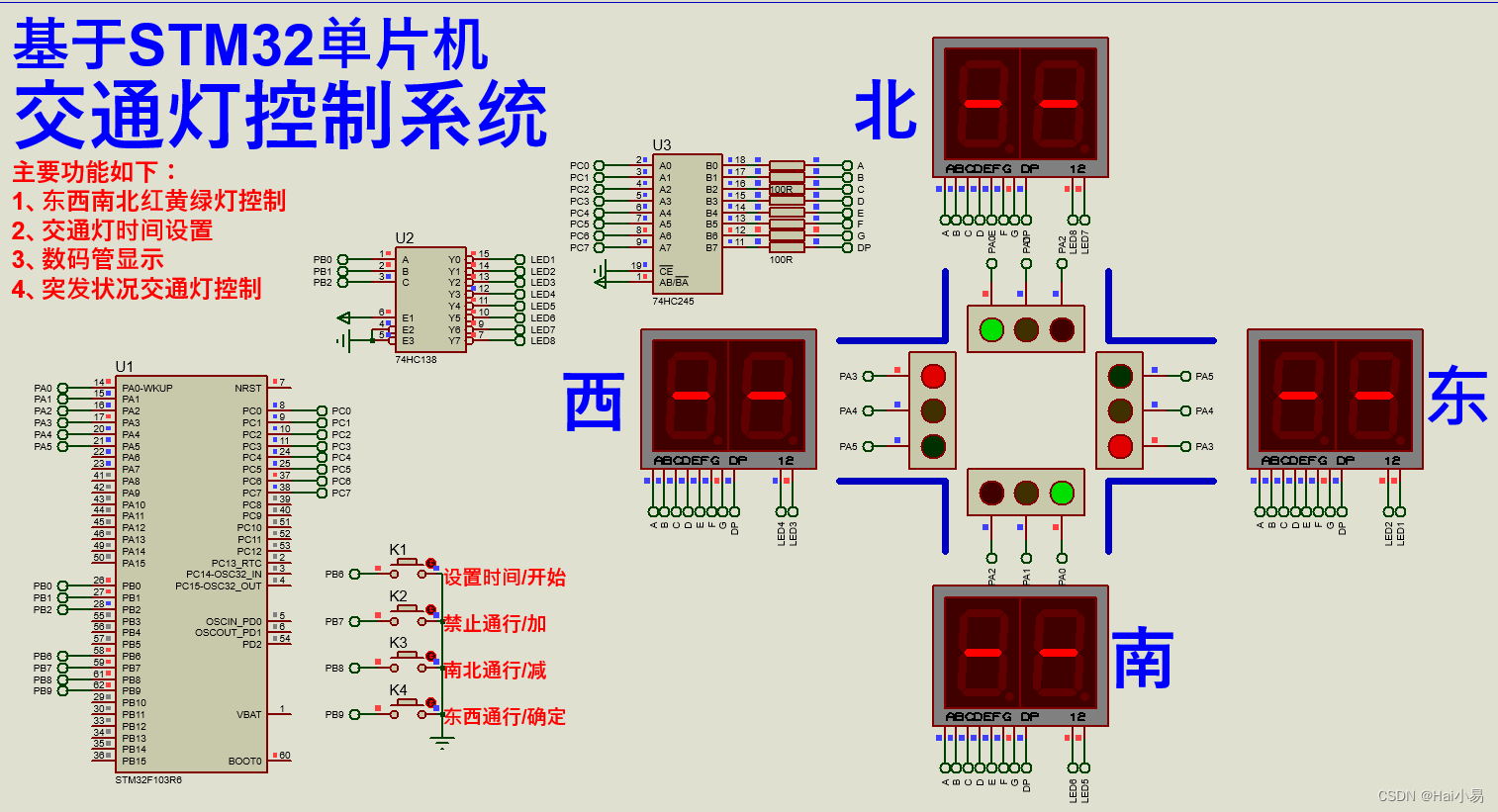
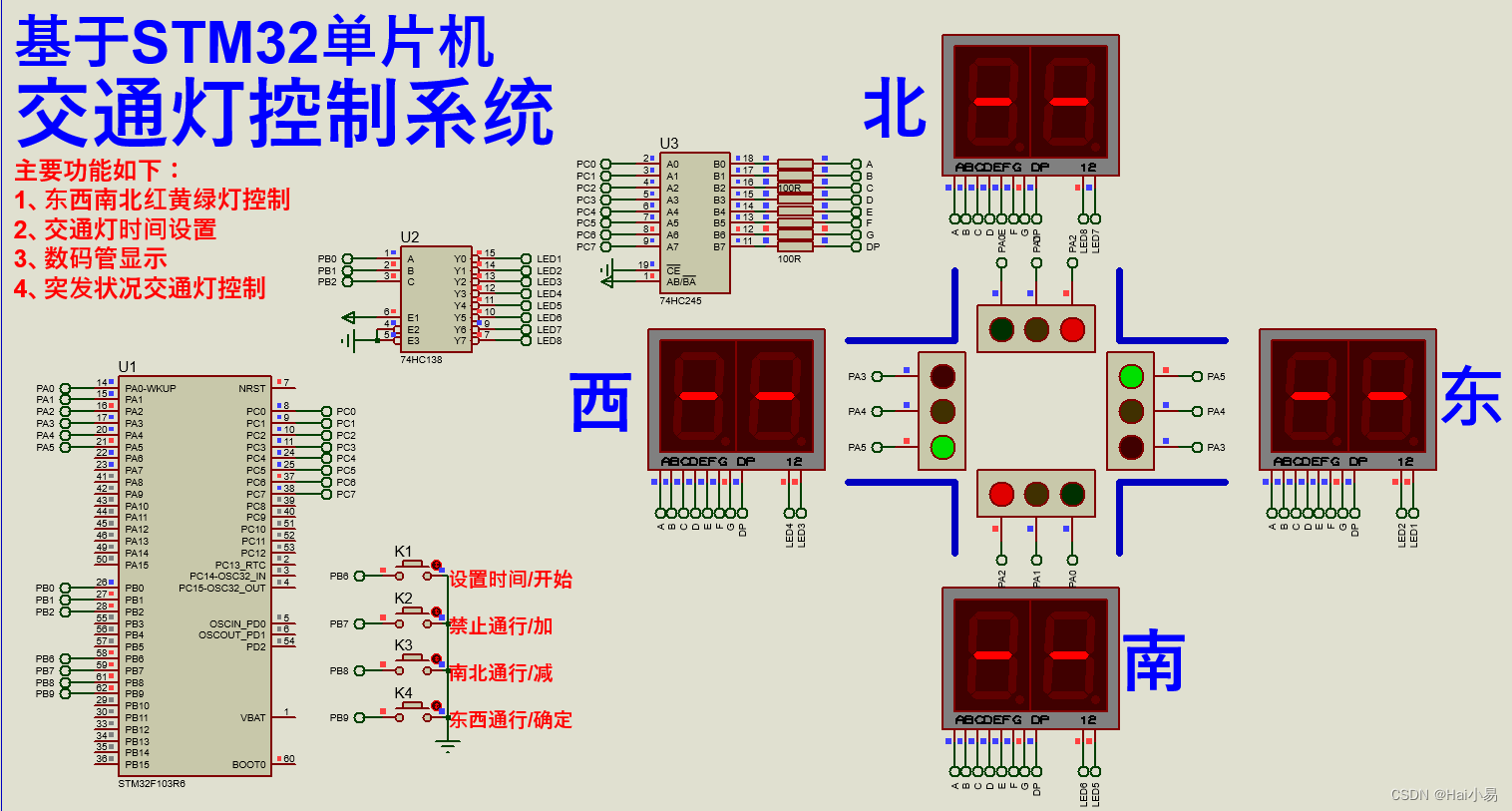
本项目使用Proteus8仿真STM32单片机控制器,使用数码管、按键、交通信号灯模块等。
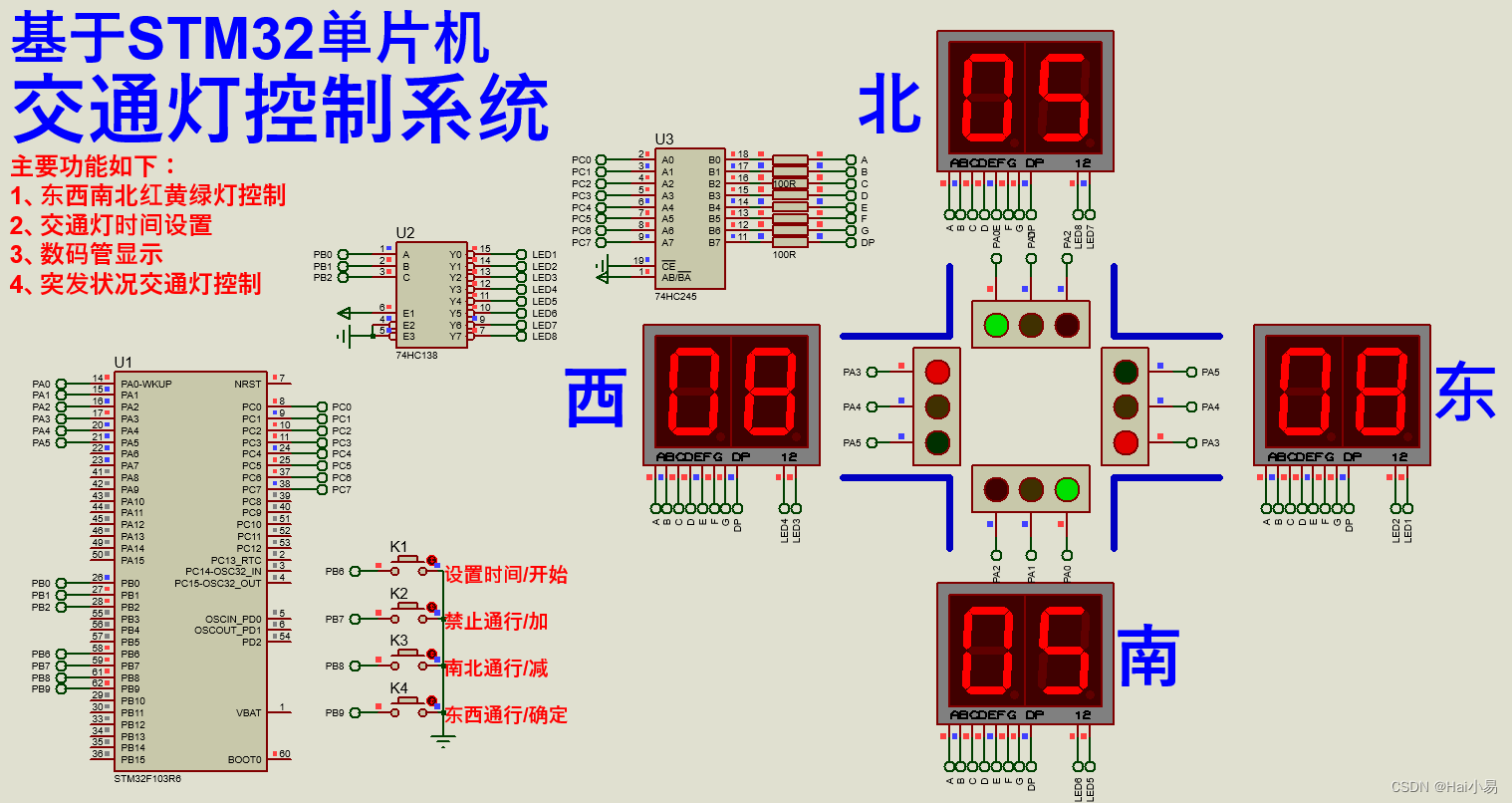
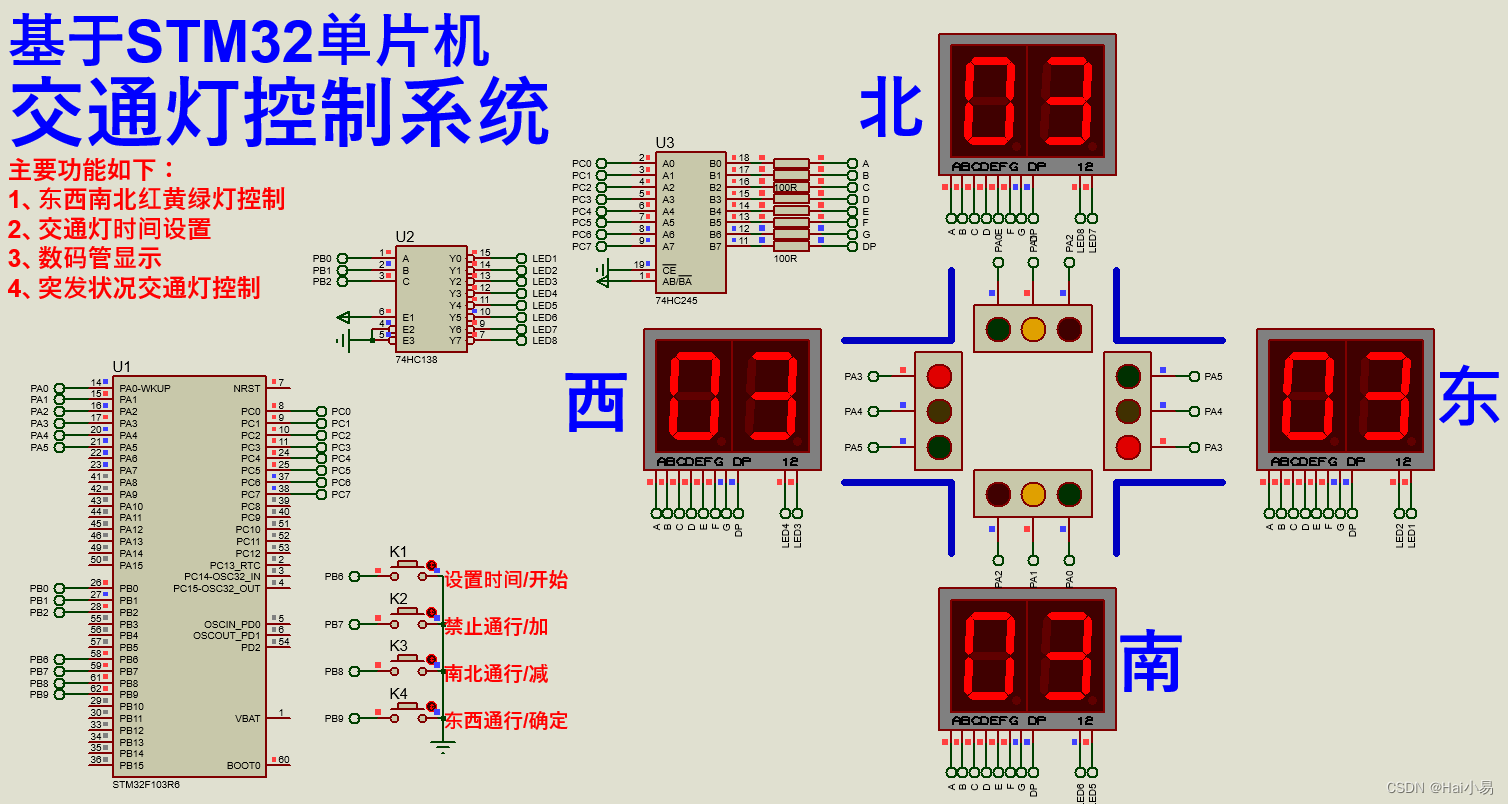
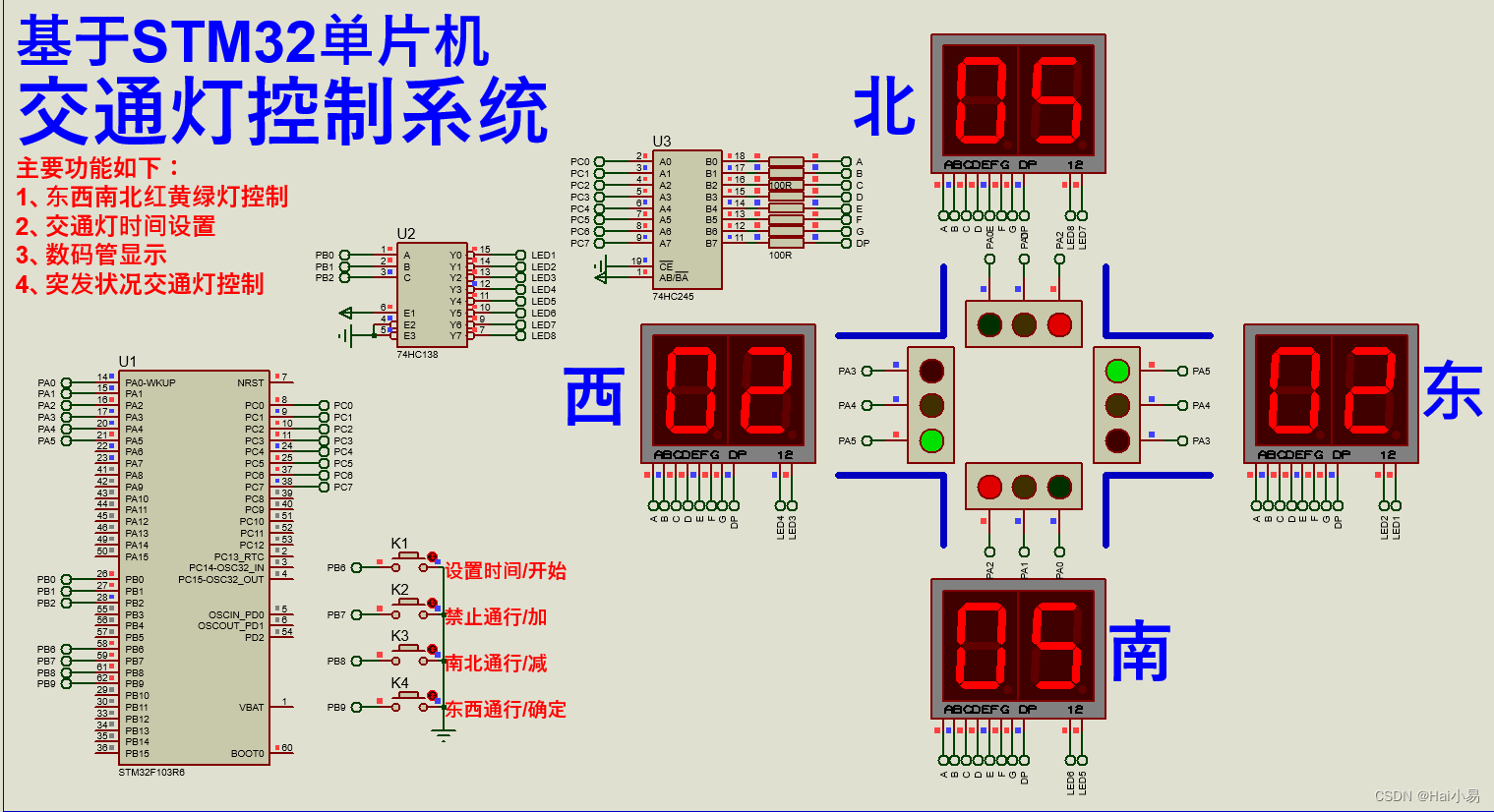
系统运行后,交通灯系统开始运行,数码管显示初始时间,默认南北绿灯5S,东西红灯8S,绿灯过后南北黄灯3秒;然后切换东西绿灯5S,南北红灯8S,绿灯过后南北黄灯3秒;如此循环。
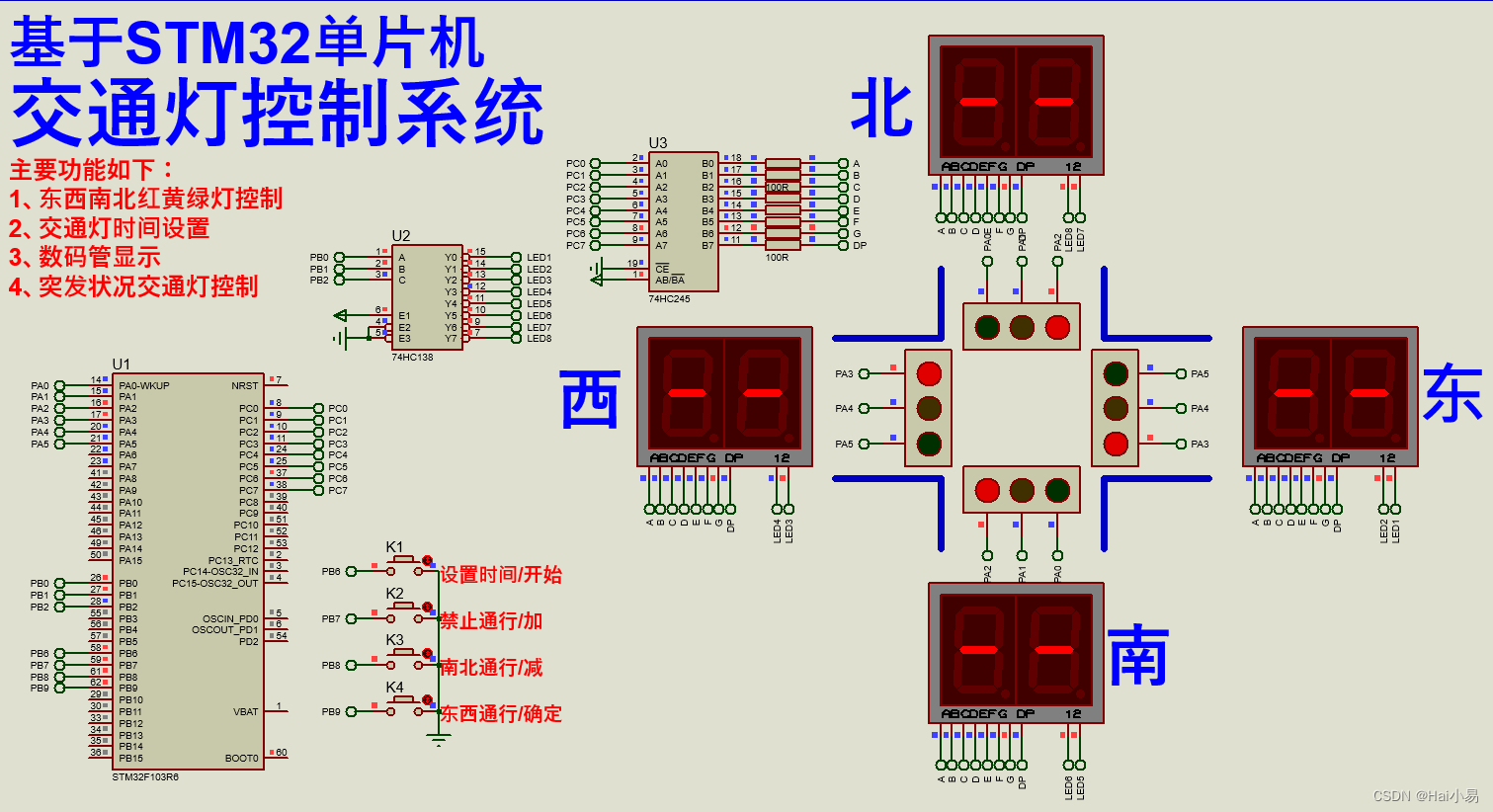
可使用K1键进入红绿灯时间设置,K2和K3进行加减调节,设定好后,K4键确定并继续运行。在运行过程中,可通过K2键禁止通行,此时东南西北方向红灯亮,K3键允许南北通行,此时南北绿灯亮,东西红灯亮。
K4键允许东西通行,此时南北红灯亮,东西绿灯亮。此时可按下K1键返回
交通灯自动控制模式运行。
主要功能如下:
1、东西南北红黄绿灯控制
2、交通灯时间设置
3、数码管显示
4、突发状况交通灯控制
二、软件设计
/*
作者:嗨小易(QQ:3443792007)
*/
/*******************************************************************************
* 函 数 名 : TIM2_IRQHandler
* 函数功能 : TIM2中断函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void TIM2_IRQHandler(void)
{
static u8 i=0;
if(TIM_GetITStatus(TIM2,TIM_IT_Update))
{
i++;
if(i>=100)//间隔1S
{
i=0;
sys_ctrl.sec++;
if(sys_ctrl.led_sta==0)//南北绿灯,东西红灯时间
{
sys_ctrl.nbled_time=sys_ctrl.gled_time-sys_ctrl.sec;
sys_ctrl.dxled_time=sys_ctrl.rled_time-sys_ctrl.sec;
//LED灯
NB_GLED=1;NB_YLED=0;NB_RLED=0;
DX_GLED=0;DX_YLED=0;DX_RLED=1;
if(sys_ctrl.sec>=sys_ctrl.gled_time)
{
sys_ctrl.sec=0;
sys_ctrl.led_sta=1;
sys_ctrl.nbled_time=YLED_TIME-sys_ctrl.sec;
sys_ctrl.dxled_time=YLED_TIME-sys_ctrl.sec;
//LED灯
NB_GLED=0;NB_YLED=1;NB_RLED=0;
DX_GLED=0;DX_YLED=0;DX_RLED=1;
}
}
else if(sys_ctrl.led_sta==1)//南北黄灯,东西红灯时间
{
sys_ctrl.nbled_time=YLED_TIME-sys_ctrl.sec;
sys_ctrl.dxled_time=YLED_TIME-sys_ctrl.sec;
if(sys_ctrl.sec>=YLED_TIME)
{
sys_ctrl.sec=0;
sys_ctrl.led_sta=2;
sys_ctrl.nbled_time=sys_ctrl.rled_time-sys_ctrl.sec;
sys_ctrl.dxled_time=sys_ctrl.gled_time-sys_ctrl.sec;
//LED灯
NB_GLED=0;NB_YLED=0;NB_RLED=1;
DX_GLED=1;DX_YLED=0;DX_RLED=0;
}
}
else if(sys_ctrl.led_sta==2)//南北红灯,东西绿灯时间
{
sys_ctrl.nbled_time=sys_ctrl.rled_time-sys_ctrl.sec;
sys_ctrl.dxled_time=sys_ctrl.gled_time-sys_ctrl.sec;
if(sys_ctrl.sec>=sys_ctrl.gled_time)
{
sys_ctrl.sec=0;
sys_ctrl.led_sta=3;
sys_ctrl.nbled_time=YLED_TIME-sys_ctrl.sec;
sys_ctrl.dxled_time=YLED_TIME-sys_ctrl.sec;
//LED灯
NB_GLED=0;NB_YLED=0;NB_RLED=1;
DX_GLED=0;DX_YLED=1;DX_RLED=0;
}
}
else if(sys_ctrl.led_sta==3)//南北红灯,东西黄灯时间
{
sys_ctrl.nbled_time=YLED_TIME-sys_ctrl.sec;
sys_ctrl.dxled_time=YLED_TIME-sys_ctrl.sec;
if(sys_ctrl.sec>=YLED_TIME)
{
sys_ctrl.sec=0;
sys_ctrl.led_sta=0;
sys_ctrl.nbled_time=sys_ctrl.gled_time-sys_ctrl.sec;
sys_ctrl.dxled_time=sys_ctrl.rled_time-sys_ctrl.sec;
//LED灯
NB_GLED=1;NB_YLED=0;NB_RLED=0;
DX_GLED=0;DX_YLED=0;DX_RLED=1;
}
}
}
}
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
}
//系统数据显示
void sys_data_show(void)
{
u8 buf[8];
//正常显示
while(sys_ctrl.mode==0)
{
buf[0]=gsmg_code[sys_ctrl.nbled_time/10];
buf[1]=gsmg_code[sys_ctrl.nbled_time%10];
buf[2]=gsmg_code[sys_ctrl.nbled_time/10];
buf[3]=gsmg_code[sys_ctrl.nbled_time%10];
buf[4]=gsmg_code[sys_ctrl.dxled_time/10];
buf[5]=gsmg_code[sys_ctrl.dxled_time%10];
buf[6]=gsmg_code[sys_ctrl.dxled_time/10];
buf[7]=gsmg_code[sys_ctrl.dxled_time%10];
smg_display(buf,1);
break;
}
//时间设置模式显示
while(sys_ctrl.mode==1)
{
buf[0]=gsmg_code[sys_ctrl.gled_time/10];
buf[1]=gsmg_code[sys_ctrl.gled_time%10];
buf[2]=gsmg_code[sys_ctrl.gled_time/10];
buf[3]=gsmg_code[sys_ctrl.gled_time%10];
buf[4]=gsmg_code[sys_ctrl.rled_time/10];
buf[5]=gsmg_code[sys_ctrl.rled_time%10];
buf[6]=gsmg_code[sys_ctrl.rled_time/10];
buf[7]=gsmg_code[sys_ctrl.rled_time%10];
smg_display(buf,1);
break;
}
//禁止通行显示、//南北通行显示、//东西通行显示
while(sys_ctrl.mode==2 || sys_ctrl.mode==3 || sys_ctrl.mode==4)
{
buf[0]=0x40;
buf[1]=0x40;
buf[2]=0x40;
buf[3]=0x40;
buf[4]=0x40;
buf[5]=0x40;
buf[6]=0x40;
buf[7]=0x40;
smg_display(buf,1);
break;
}
}
//系统数据设置
void sys_data_set(void)
{
u8 key=0;
key=KEY_Scan(0);
if(sys_ctrl.mode==0)
{
//时间设置
if(key==KEY1_PRESS)
{
sys_ctrl.mode=1;
TIM_Cmd(TIM2,DISABLE);//关闭定时器
}
}
//非时间设置模式
if(sys_ctrl.mode!=1)
{
if(key==KEY1_PRESS)
{
sys_ctrl.mode=0;
TIM_Cmd(TIM2,ENABLE);//打开定时器
}
//禁止通行
else if(key==KEY2_PRESS)
{
sys_ctrl.mode=2;
TIM_Cmd(TIM2,DISABLE);//关闭定时器
//LED灯
NB_GLED=0;NB_YLED=0;NB_RLED=1;
DX_GLED=0;DX_YLED=0;DX_RLED=1;
}
//南北通行
else if(key==KEY3_PRESS)
{
sys_ctrl.mode=3;
TIM_Cmd(TIM2,DISABLE);//关闭定时器
//LED灯
NB_GLED=1;NB_YLED=0;NB_RLED=0;
DX_GLED=0;DX_YLED=0;DX_RLED=1;
}
//东西通行
else if(key==KEY4_PRESS)
{
sys_ctrl.mode=4;
TIM_Cmd(TIM2,DISABLE);//关闭定时器
//LED灯
NB_GLED=0;NB_YLED=0;NB_RLED=1;
DX_GLED=1;DX_YLED=0;DX_RLED=0;
}
}
//时间设置模式
if(sys_ctrl.mode==1)
{
if(key==KEY2_PRESS)//加
{
sys_ctrl.gled_time++;
if(sys_ctrl.gled_time>90)sys_ctrl.gled_time=0;
sys_ctrl.rled_time=sys_ctrl.gled_time+YLED_TIME;
}
else if(key==KEY3_PRESS)//减
{
sys_ctrl.gled_time--;
if(sys_ctrl.gled_time<0)sys_ctrl.gled_time=90;
sys_ctrl.rled_time=sys_ctrl.gled_time+YLED_TIME;
}
else if(key==KEY4_PRESS)//确定
{
sys_ctrl.mode=0;
TIM_Cmd(TIM2,ENABLE);//打开定时器
}
}
}
//应用控制系统
void appdemo_show(void)
{
LED_Init();
KEY_Init();
smg_init();
SMG_DATAPORT(0);
sys_parm_init();//系统参数初始化
TIM2_Init(500-1,79);//定时10ms
while(1)
{
sys_data_show();//系统数据显示
sys_data_set();//系统数据设置
}
}
三、实验现象
演示视频:https://space.bilibili.com/444388619
联系作者
专注于51单片机、STM32、国产32、DSP、Proteus、ardunio、ESP32、物联网软件开发,PCB设计,视频分享,技术交流。














 1405
1405











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









