






基于MATLAB的粒子群优化(PSO)算法的机器人路径规划,可视化界面,可自定义障碍物,起点和终点。
ID:36139724664974367
请叫我醉04551
基于MATLAB的粒子群优化(PSO)算法的机器人路径规划:可视化界面与自定义障碍物、起点和终点
一、引言
随着科技的飞速发展,机器人技术已经深入到各个领域。其中,机器人的路径规划是机器人技术的重要组成部分,对于提高机器人的工作效率和安全性具有重要意义。粒子群优化(Particle Swarm Optimization,PSO)算法作为一种智能优化算法,已广泛应用于机器人路径规划。本文将介绍一种基于MATLAB的粒子群优化算法的机器人路径规划方法,并展示其可视化界面和自定义障碍物、起点和终点的功能。
二、粒子群优化算法
粒子群优化算法是一种模拟鸟群捕食行为的优化算法。在该算法中,每个粒子代表一个可能的解,粒子的速度和位置根据其历史最优解和全局最优解进行更新。通过不断迭代,粒子群最终收敛到最优解。
三、基于MATLAB的粒子群优化算法实现
在MATLAB中,我们可以通过编写代码实现粒子群优化算法。首先,我们需要定义粒子的位置、速度和适应度函数。然后,根据适应度函数计算每个粒子的适应度,并根据适应度更新粒子的速度和位置。最后,通过迭代计算,得到最优解。
四、机器人路径规划
在机器人路径规划中,我们需要将粒子群优化算法应用于机器人的路径规划。我们可以通过定义机器人的路径为粒子的位置,将路径的优化问题转化为粒子群优化问题。然后,我们可以使用粒子群优化算法来找到最优路径。
五、可视化界面
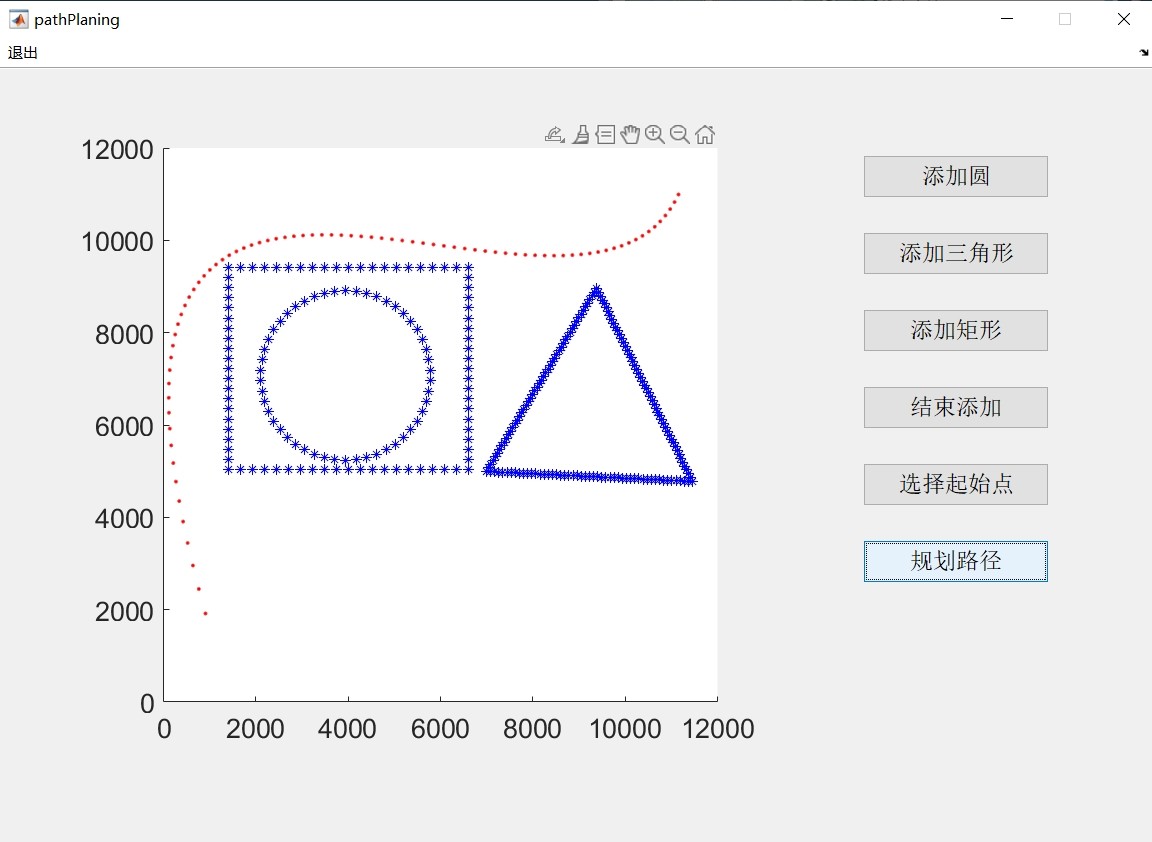
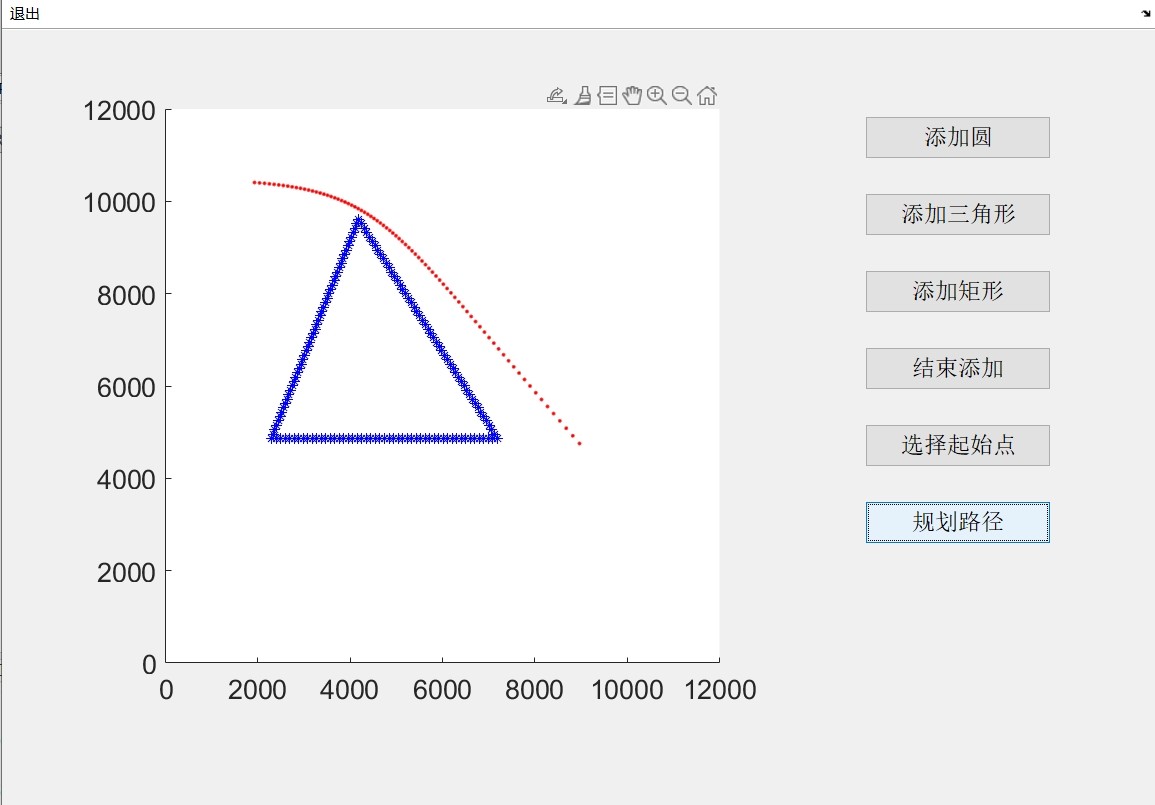
为了更直观地展示机器人路径规划的结果,我们可以使用MATLAB的GUI(图形用户界面)设计工具来设计可视化界面。在界面中,我们可以显示机器人的路径、障碍物和起点、终点等信息。
六、自定义障碍物、起点和终点
在MATLAB中,我们可以使用GUI设计工具来创建自定义的障碍物、起点和终点。用户可以通过界面来输入障碍物的位置、大小以及起点和终点的位置。然后,我们将这些信息传递给粒子群优化算法,以找到避开障碍物的最优路径。
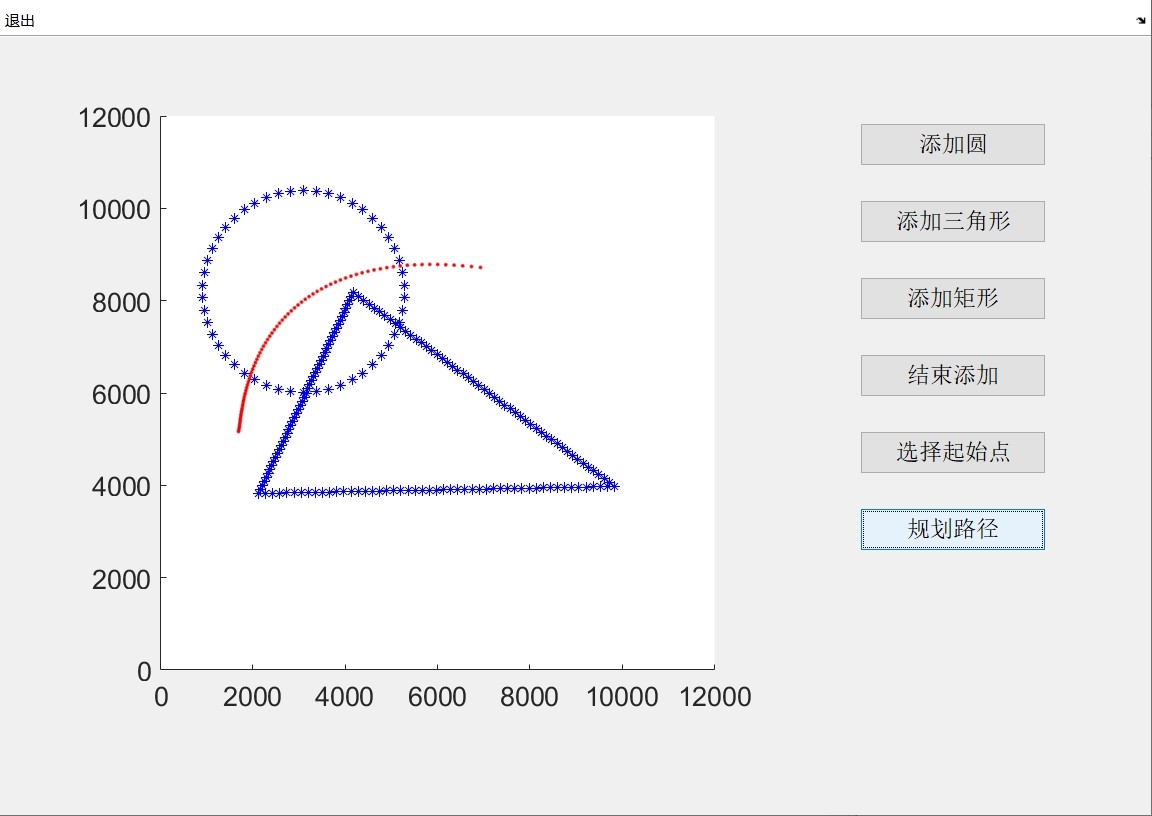
七、实验结果与分析
我们通过实验验证了基于MATLAB的粒子群优化算法的机器人路径规划方法。在实验中,我们设置了不同的障碍物、起点和终点,并观察了机器人路径的变化。实验结果表明,该方法能够有效地找到避开障碍物的最优路径,并且具有良好的鲁棒性和适应性。
八、结论
本文介绍了一种基于MATLAB的粒子群优化算法的机器人路径规划方法,并展示了其可视化界面和自定义障碍物、起点和终点的功能。实验结果表明,该方法能够有效地找到避开障碍物的最优路径,为机器人的路径规划提供了新的思路和方法。
九、未来工作
未来,我们可以进一步研究和改进粒子群优化算法,以提高其优化效果和效率。同时,我们可以将该方法应用于更复杂的机器人路径规划问题,如多机器人路径规划、动态环境下的路径规划等。此外,我们还可以将该方法与其他算法结合,以实现更高效的机器人路径规划。
十、致谢
感谢MATLAB软件提供的强大功能和工具,使得我们能够方便地实现粒子群优化算法的机器人路径规划。同时,也感谢所有为本文付出时间和精力的研究人员和同行。
十一、参考文献
[此处列出相关参考文献]
十二、附录
[此处可附上相关图表、数据等]
具体的代码,程序如下地址:http://wekup.cn/724664974367.html
















 3570
3570

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









