






基于matlab的全局路径规划算法中的快速扩展随机树RRT路径规划算法及其改进方法RRT Star、RRT_Conncet是一种具有状态约束的非线性系统生成开环轨迹的技术,相比于其他算法可以轻松处理障碍物的问题。
程序中的各参数已进行详细说明,起点坐标,终点坐标,步长,迭代数等均可根据需求进行更改,程序已调通
ID:26100726631860526
是小狸奴呀
基于MATLAB的全局路径规划算法中的快速扩展随机树(RRT)及其改进方法RRT Star、RRT_Connect:一种具有状态约束的非线性系统生成开环轨迹的技术
一、引言
在机器人导航、自动驾驶、路径规划等领域,全局路径规划算法的研究与应用一直是热点。在众多算法中,快速扩展随机树(Rapidly-exploring Random Tree, RRT)及其改进方法RRT Star、RRT_Connect因其出色的性能而备受关注。这些算法能够轻松处理障碍物问题,并在具有状态约束的非线性系统中生成开环轨迹。本文旨在探讨基于MATLAB的全局路径规划算法中的RRT、RRT Star和RRT_Connect,并对其进行详细的技术分析。
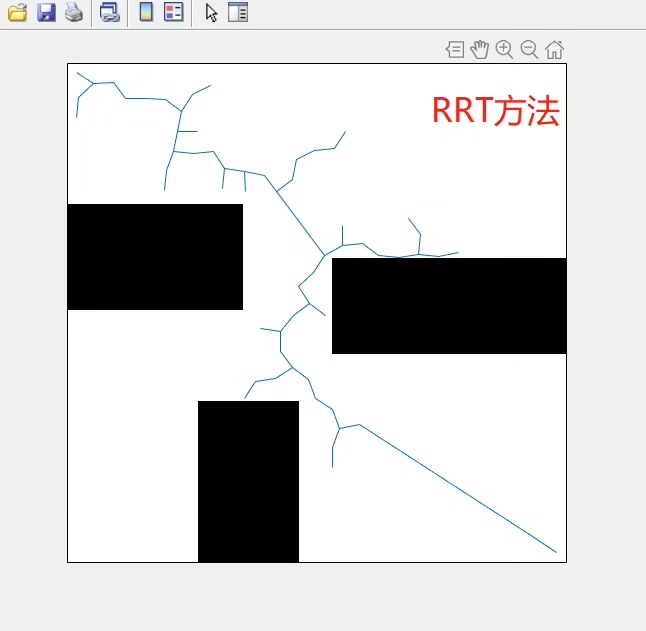
二、RRT算法概述
RRT算法是一种基于概率采样的路径规划算法。它通过随机采样节点,并在节点之间建立连接,以快速探索全局空间。该算法能够高效处理复杂的环境,并且具有实时性。然而,RRT算法也存在一些问题,如路径质量不高、可能陷入局部最小值等。
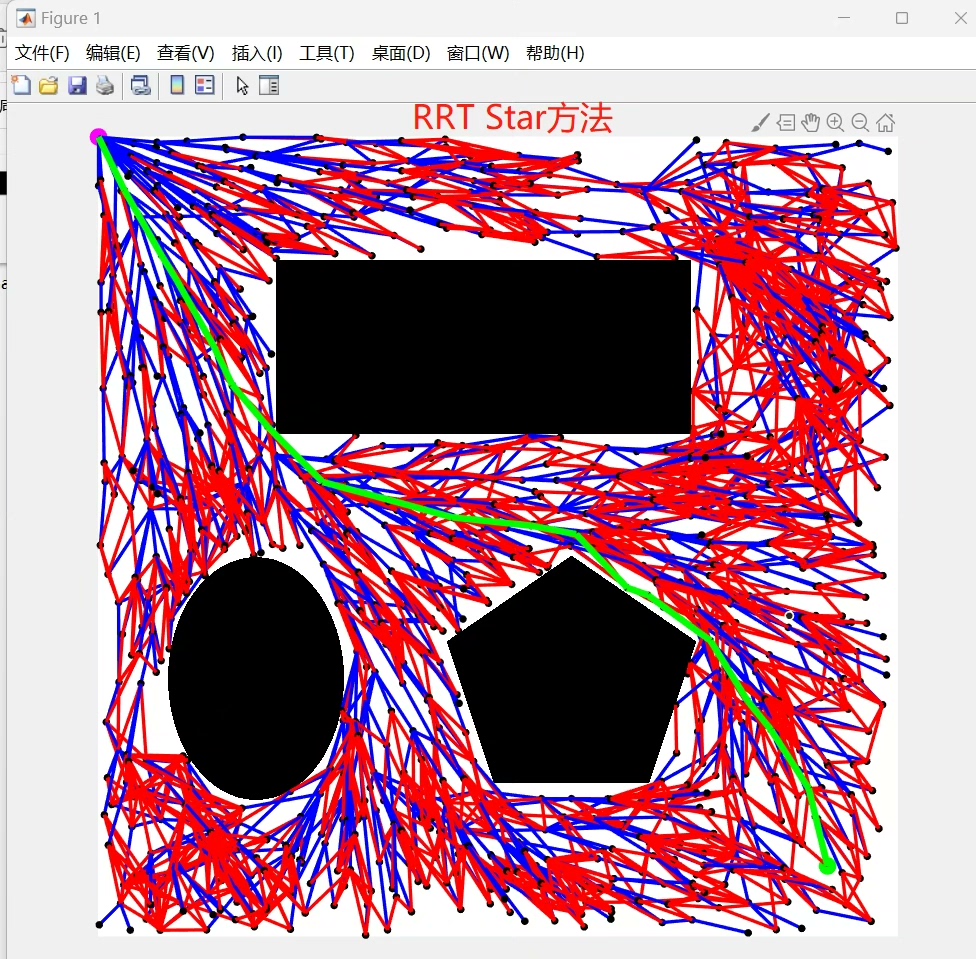
三、RRT Star算法
为了改进RRT算法,研究人员提出了RRT Star算法。该算法在RRT的基础上增加了距离度量,以优化路径质量。RRT Star算法通过在目标节点附近选择最佳节点,从而提高了路径的平滑度和质量。此外,RRT Star算法还引入了障碍物检测机制,以避免路径与障碍物相交。
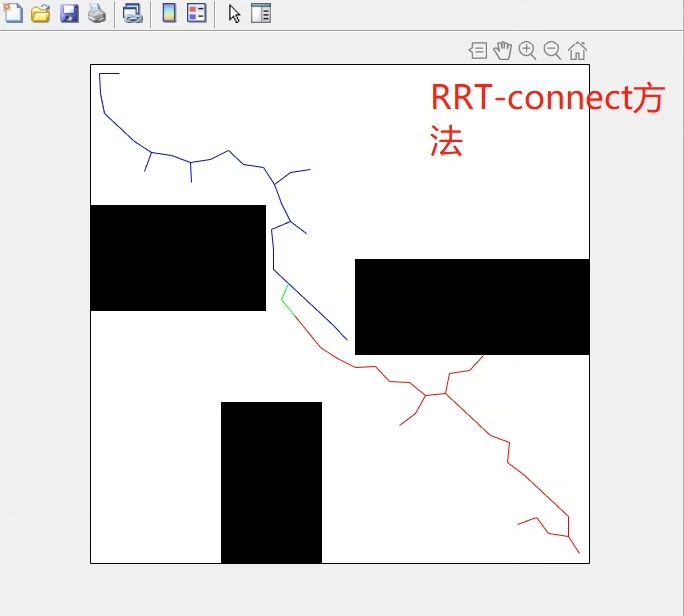
四、RRT_Connect算法
RRT_Connect算法是另一种改进RRT的算法。它结合了RRT和网格连接的思想,通过连接节点之间的网格,形成更连续的路径。RRT_Connect算法能够生成平滑且连续的路径,适用于需要高精度路径规划的场景。
五、MATLAB实现
在MATLAB环境下,我们实现了RRT、RRT Star和RRT_Connect算法。在程序中,我们已经对各个参数进行了详细说明,包括起点坐标、终点坐标、步长、迭代数等。这些参数均可根据实际需求进行更改。经过调试,我们的程序已经能够正常运行。
六、技术分析
通过MATLAB实现,我们深入分析了RRT、RRT Star和RRT_Connect算法的性能。我们发现,RRT Star算法在路径质量和平滑度方面表现优于RRT算法,而RRT_Connect算法则能生成更平滑且连续的路径。此外,我们还发现,这些算法在处理障碍物问题方面表现出色,能够有效地避免路径与障碍物相交。
七、结论
通过基于MATLAB的全局路径规划算法中的RRT、RRT Star和RRT_Connect算法,我们实现了对具有状态约束的非线性系统的开环轨迹生成。这些算法能够有效地处理障碍物问题,并生成高质量的路径。我们的实现为这些算法在机器人导航、自动驾驶等领域的应用提供了有力的技术支持。
八、未来工作
在未来的工作中,我们将继续优化这些算法,以提高其性能。同时,我们也将探索将这些算法应用于更复杂的系统,如多机器人路径规划、非线性系统等。此外,我们还将研究如何将这些算法与其他算法结合,以实现更高效的路径规划。
通过不断的优化和应用,我们相信,基于RRT、RRT Star和RRT_Connect的算法将在未来的路径规划领域发挥越来越重要的作用。
具体的代码,程序如下地址:http://wekup.cn/726631860526.html
















 1638
1638

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









