






【工作记录 3.9.2024】
1. 在newGait中添加了侧前方移动的代码, 以及侧向移动的代码(螃蟹步),现在机器狗可以朝着任何方向平移
2. 写了一个upper level的function :freewalk

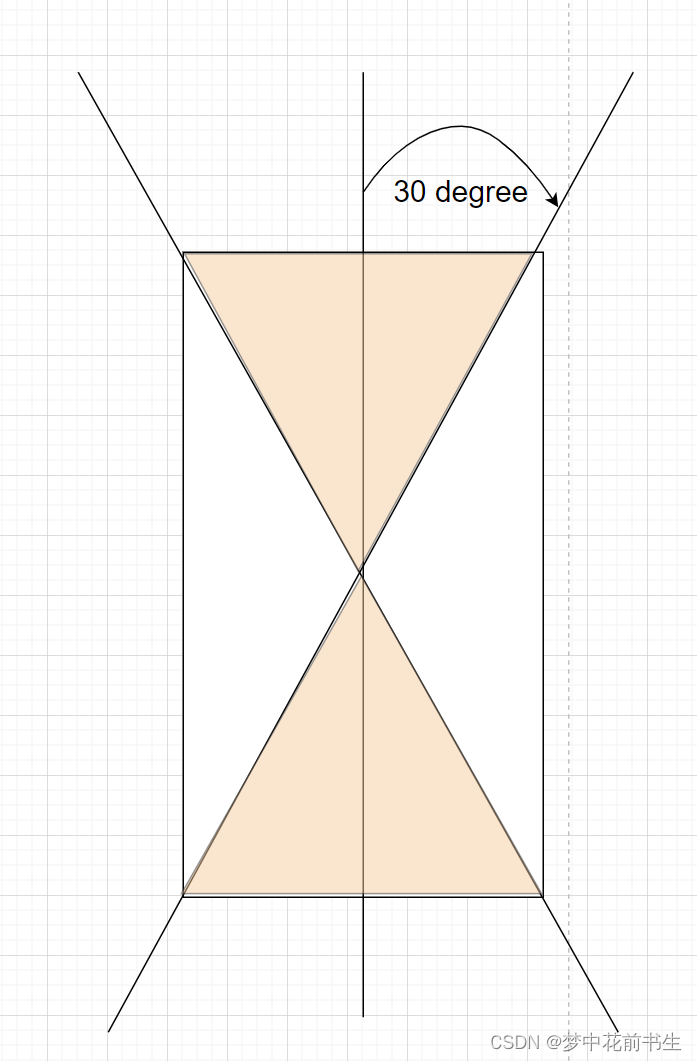
freewalk指令后面接的是输入的前进角度,范围是(-30,30)and (-150,210), 也就是下图所示橙色的范围,超过这个范围的话z方向上的位移就会超出物理限制。
当输入为30度时机器狗向左前方行走,当输入为-30度时向右前方行走
 452
650
452
650











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























