






AMESim-Simulink热泵空调系统联合仿真模型PID和模糊控制,电子膨胀阀开度采用PID控制
注:确保在使用联合仿真之前已经安装并配置了适当的接口和工具#模型
YID:9660782752804583
TB_98221822
AMESim-Simulink热泵空调系统联合仿真模型PID和模糊控制,电子膨胀阀开度采用PID控制
随着科技的不断发展,热泵空调系统在建筑领域得到了广泛的应用。热泵空调系统以其高效节能、环保无污染等优点,逐渐取代了传统的空调系统。然而,热泵空调系统的设计与控制面临着诸多挑战。为了使系统能够更好地适应工况变化和用户需求,研究人员不断努力提出了各种控制策略。其中,PID控制和模糊控制作为最常用的控制方法之一,在热泵空调系统中具有重要的应用价值。
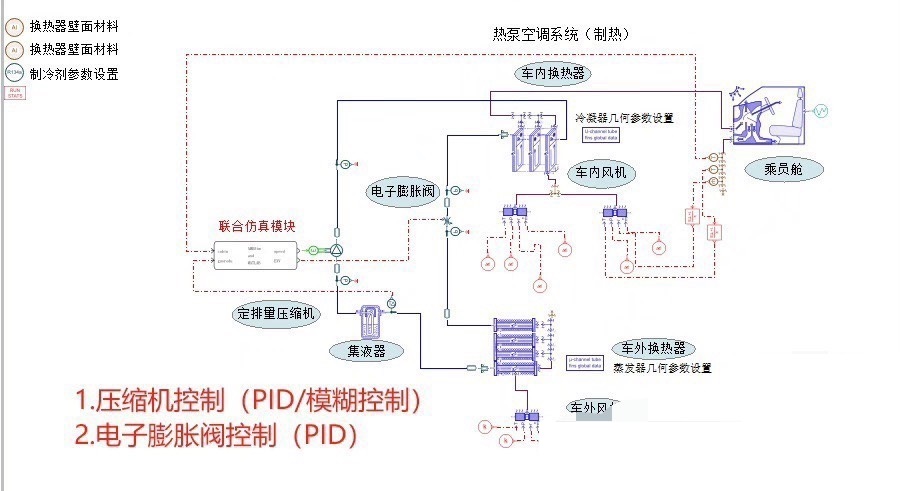
PID控制是一种经典的控制算法,具有简单易实现、较好的性能等优点。在热泵空调系统中,PID控制常被用于控制电子膨胀阀的开度。电子膨胀阀的开度对系统的制冷效果和能耗有着重要影响。通过PID控制,可以实现对电子膨胀阀开度的精确控制,从而达到优化系统性能的目的。PID控制的基本原理是根据当前误差、过去误差和未来误差的变化趋势,通过比例、积分和微分三个部分的组合计算出控制量。在热泵空调系统中,PID控制可以根据温度差、压力差等参数来调节电子膨胀阀的开度,从而实现对系统的精确控制。
而模糊控制作为一种基于模糊逻辑的控制方法,具有良好的鲁棒性和适应性。模糊控制的主要思想是对模糊、难以精确描述的系统进行控制。在热泵空调系统中,模糊控制可以用于对系统的整体运行状态进行调节和控制,以达到更好的性能。模糊控制的核心是建立模糊规则和隶属函数。通过对输入和输出的模糊化,以及模糊规则的设计,可以实现对系统的模糊控制。在热泵空调系统中,模糊控制可以根据当前温度、湿度等参数来调节电子膨胀阀的开度,以实现对系统的优化控制。
为了更好地研究和优化热泵空调系统的控制策略,本文提出了一种基于AMESim-Simulink联合仿真的方法。AMESim和Simulink分别是广泛应用于系统建模和控制设计的仿真软件。通过将AMESim中的热泵空调系统模型和Simulink中的控制算法模型进行联合仿真,可以实现对系统和控制算法的综合分析。本文将重点研究PID控制和模糊控制在热泵空调系统中的应用。
在联合仿真模型中,电子膨胀阀的开度采用PID控制。首先,通过温度传感器采集到室内温度和设定温度。然后,将这两个参数输入到PID控制算法模型中,计算出电子膨胀阀的开度。最后,将开度信号传输给热泵空调系统模型,实现对制冷效果的控制。PID控制的参数可以根据实际需求进行调整,以获得更好的控制效果。
与之相对应的是模糊控制。在联合仿真模型中,模糊控制器的输入是室内温度与设定温度之间的偏差。根据偏差的大小和变化趋势,模糊控制器调整电子膨胀阀的开度。模糊控制的关键是建立模糊规则和隶属函数。通过调整模糊规则和隶属函数的参数,可以实现对系统的优化控制。
总结起来,本文基于AMESim-Simulink联合仿真模型,研究了PID控制和模糊控制在热泵空调系统中的应用。通过对电子膨胀阀开度的控制,可以实现对系统性能的优化。PID控制以其简单易实现和较好的性能适用于热泵空调系统中的电子膨胀阀开度控制。而模糊控制以其鲁棒性和适应性适用于对系统整体运行状态的调节和控制。在实际应用中,可以根据具体需求选择合适的控制策略,以获得更好的控制效果。通过联合仿真模型的应用,可以实现对热泵空调系统的整体优化和性能分析,为系统设计和控制提供了参考依据。
相关的代码,程序地址如下:http://nodep.cn/782752804583.html
















 652
652

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









