







本篇博客接着讲解机器视觉的有关技术和知识。包括宽度测量,缺陷检测,医学处理。
一:宽度测量
在传统的自动化生产中,对于尺寸的测量,典型的方法就是千分尺、游标卡尺、塞尺等。而这些测量手段测量精度低、速度慢,无法满足大规模的自动化生产需求。基于机器视觉的尺寸测量属于非接触式的测量,具有检测精度高、速度快、成本低、安装简便等优点。可以检测零件的各种尺寸,如长度、圆、角度、线弧等测量。
利用python+opencv方法可以进行宽度的测量。步骤是先选取出一个矩形,然后进行阈值分割,再进行反色,边缘提取之后进行点的选择,输出坐标做出两条线段,根据线段进行矩形绘制,这样之后就可以计算两条直线之间的距离,也就是我们需要求得的宽度。
OpenCV是一个c++库,用于实时处理计算机视觉方面的问题,涵盖了很多计算机视觉领域的模块。配合python调用c++库,可以很方便地进行宽度测量,实现要求。
步骤如下:
1.导入需要的库
import cv2
import cv2 as cv
import numpy as np
import imutils
2.读取原图像查看
img = cv2.imread("1.jpg")

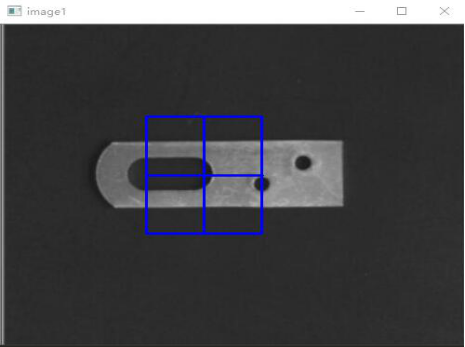
3.截取部分图像
手动地进行选取我们感兴趣的部分,然后截取出来。
img = imutils.resize(img, width=500)
roi = cv2.selectROI(windowName="image1", img=img, showCrosshair=True, fromCenter=False)
x, y, w, h = roi
cv2.rectangle(img=img, pt1=(x, y), pt2=(x + w, y + h), color=(0, 0, 255), thickness=2)
s = img[y:y+h,x:x+w]
4.反色
截取后会出现空白区域很多黑色的情况,需要进行反色,用到的方法是255去除值。
# 反色
def colorReverse(src):
height, width, channels = src.shape
for row in range(height):
for list in range(width):
for c in range(channels):
pv = src[row, list, c]
src[row, list, c] = 255 - pv
return src
src = colorReverse(s)
5.边缘检测去噪
x = cv2.Sobel(src,cv2.CV_16S,1,0)
y = cv2.Sobel(src,cv2.CV_16S,0,1)
absX = cv2.convertScaleAbs(x) # 转回uint8
absY = cv2.convertScaleAbs(y)
dst = cv2.addWeighted(absX,0.5,absY,0.5,0)
result = colorReverse(dst)
6.输出鼠标选择点的坐标
之后进行的操作是利用鼠标选择点,并显示坐标,可以判断时候用鼠标进行点击操作,如果是的话,就可以输出点的坐标在输出框或者图片上标记,把点击函数作为参数,就可以在不点击退出键的时候进行循环递归操作,知道最直到获得想要点的坐标。
# 输出鼠标选择点的坐标
# setMouseCallback使用的回调函数,这个回调函数在捕获到鼠标左键点击事件时,就在图片上点击处绘制一个实心的圆、并显示出坐标。
def on_EVENT_LBUTTONDOWN(event, x, y, flags, param):
if event == cv2.EVENT_LBUTTONDOWN:
xy = "%d,%d" % (x, y)
print (xy)
cv2.circle(result, (x, y), 1, (255, 0, 0), thickness = -1)
cv2.putText(result, xy, (x, y), cv2.FONT_HERSHEY_PLAIN,
1.0, (0,0,0), thickness = 1)
cv2.imshow("image2", result)
cv2.namedWindow("image2")
cv2.setMouseCallback("image2", on_EVENT_LBUTTONDOWN)
cv2.imshow("image2", result)
7.绘制线段用输出提示
接下来就可以根据选择的四个点进行连接输出线段,用get_len()方法可以得到两条线之间的距离。
# 绘制线段
s = cv2.line(result,(3, 30), (120, 30), (0, 255, 0), 2)
d = cv2.line(result,(3, 110), (118, 110), (0,255, 0), < 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1870
1870

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











