






【有参考文献】事件触发模型
可实现倒立摆控制仿真实验
simulink模型可直接运行
含详细参考文献
ID:73150712062942982
努力努力再努力
事件触发模型是一种非常重要的控制模型,在实际的工程应用中有广泛的应用。本文将从倒立摆控制仿真实验的角度出发,对事件触发模型进行深入探讨,并介绍了一种可直接运行的simulink模型。
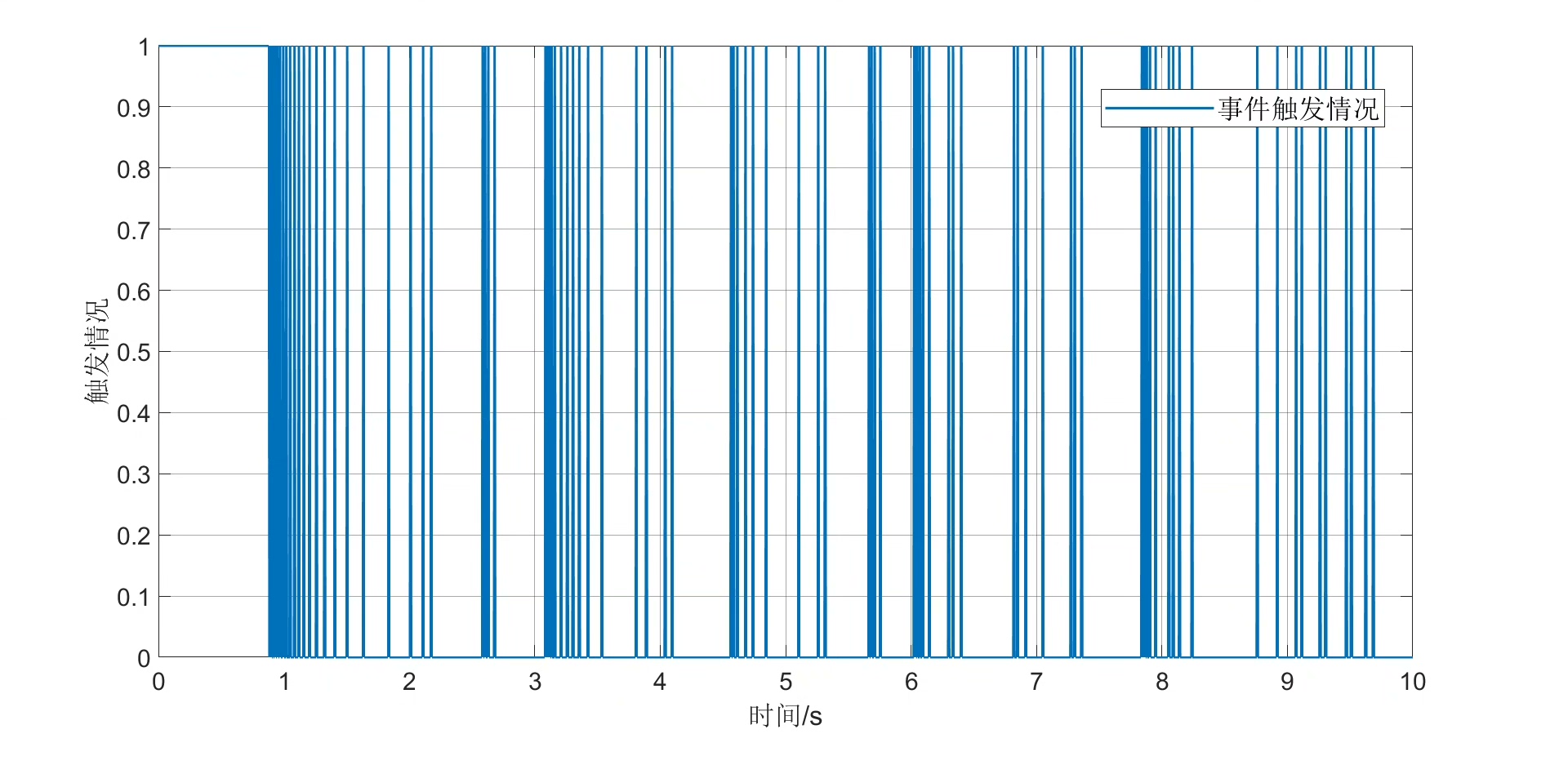
首先,我们需要了解什么是事件触发模型。事件触发模型是一种基于事件的控制策略,与传统的周期性采样控制相比,具有更高的采样效率和更低的计算能耗。它的核心思想是只在系统达到一定的触发条件时才进行采样和计算,从而降低了系统对计算资源的要求。
倒立摆是一种经典的控制系统,其动力学特性具有非线性和强耦合性。在实际应用中,倒立摆控制是一项重要的研究内容。通过对倒立摆控制的仿真实验,可以更好地理解事件触发模型的应用场景和效果。
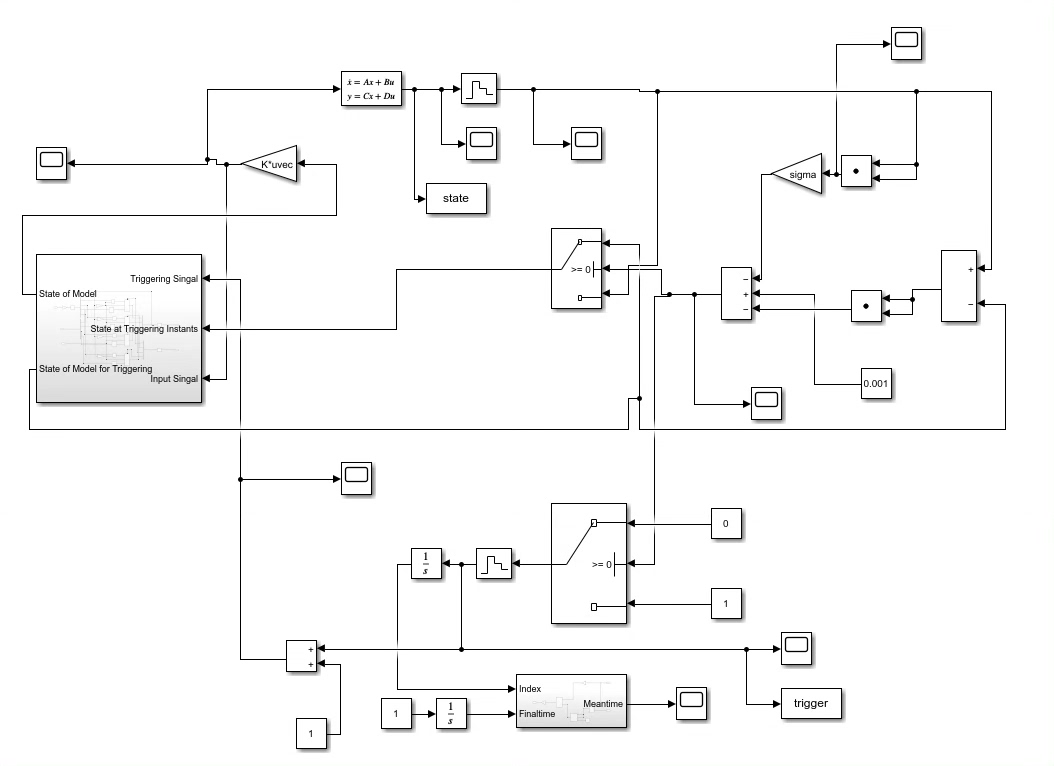
simulink是一种常用的工具,可以用于建立控制系统的模型,并进行仿真分析。本文使用simulink搭建了一个倒立摆控制的仿真模型,并将事件触发模型应用于其中。通过该模型,我们可以直观地观察和分析事件触发模型在倒立摆控制中的性能表现。
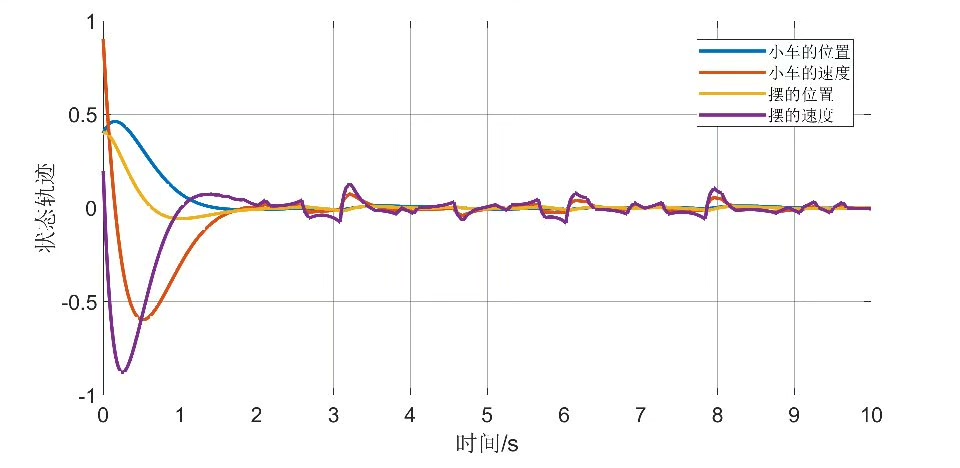
在仿真实验中,我们首先建立了倒立摆的物理模型,并通过传感器获取倒立摆的状态信息。然后,我们将事件触发模型应用于控制器中,只在倒立摆状态发生变化时进行控制计算和采样。通过对比传统的周期性采样控制,我们可以观察到事件触发模型在节约计算资源方面的优势。
在实验过程中,我们进行了多组实验,并对比了不同触发条件下的控制性能和能耗情况。通过实验结果的分析,我们可以得出结论:事件触发模型在倒立摆控制中能够有效降低计算能耗,并保持较好的控制性能。
最后,本文附上了详细的参考文献,读者可以深入研究事件触发模型在控制系统中的应用,并参考相关工作进一步扩展和优化。
综上所述,本文围绕倒立摆控制仿真实验,对事件触发模型进行了深入研究,并介绍了一种可直接运行的simulink模型。通过对事件触发模型在倒立摆控制中的应用分析,我们可以更好地理解事件触发模型的优势和应用场景。希望本文对读者在事件触发模型的研究和应用中提供一定的参考和启发。
【相关代码,程序地址】:http://fansik.cn/712062942982.html
















 7230
7230

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









