







 本文介绍了在机器视觉中使用C++进行模板匹配的方法,重点讲解了CkVision库中的ModelDemo函数,包括模板学习、参数设置、搜索范围和匹配功能。通过设置边缘轮廓的精细级别、滤波器、梯度阈值等参数,实现形状定位、计数和有无判断。此外,还讨论了匹配的自由度,如角度范围和比例范围。
本文介绍了在机器视觉中使用C++进行模板匹配的方法,重点讲解了CkVision库中的ModelDemo函数,包括模板学习、参数设置、搜索范围和匹配功能。通过设置边缘轮廓的精细级别、滤波器、梯度阈值等参数,实现形状定位、计数和有无判断。此外,还讨论了匹配的自由度,如角度范围和比例范围。
在机器视觉开发中用的最多的功能非匹配莫属了,匹配时最基本的也是最重要的一个功能,软件系统是否能正确完成任务匹配定位起了至关重要的作用,这里就就介绍一些CkVision的匹配函数。具体的Demo代码可以在CkVision官网下载。
ModelDemo.exe模板轮廓匹配定
使用图像的边缘轮廓特征作为模板,在图像中搜索形状上相似的目标,可以设置角度和比例范围,可用于定位、计数和判断有无等
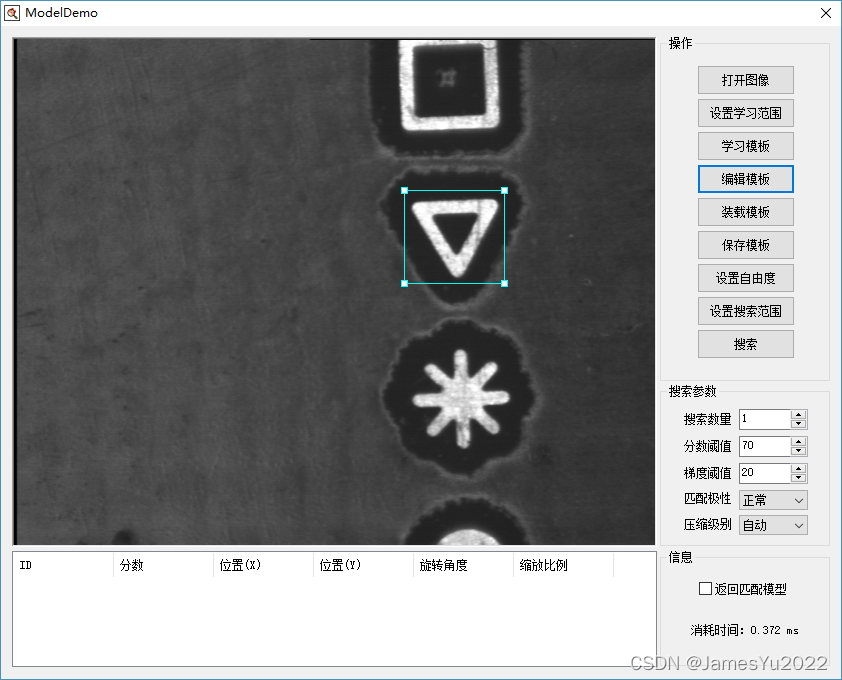
设置学习范围:将会在画面中出现一个青蓝色的ROI矩形框,点击选取矩形框,再将该矩形移动到需要作为标准模板的图像区域并调整大小(如上图)。
学习模板:按学习ROI在图像上学模板轮廓。
编辑模板:学模板之后可查看编辑模板。
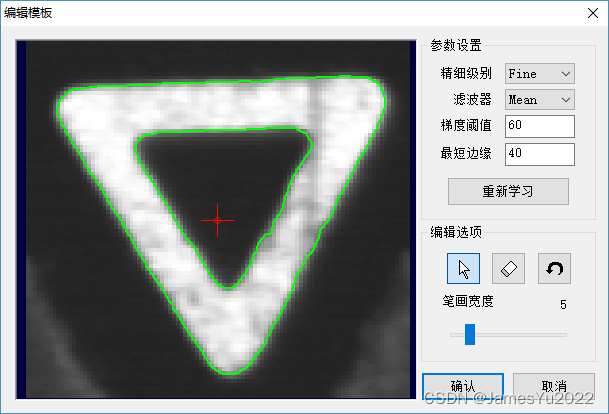
精细级别:定义边缘轮廓的细腻程度,有Fine、Noraml和Coarse3个选项,Fine模式精度最高,但边缘太模糊时将无法检测到边缘,Noraml和Coarse3模式则会通过压缩方式来提取模糊的边缘,同时会丢失细节部分,并会影响定位进精度。
滤波器:用于增强边缘提取功能,跟精细级别类似,但不会影响定位精度。
梯度阈值:取值范围0到255,只有梯度值大于该值的边缘点才被检测到,梯度值是度量图像边缘的清晰度或对比度。
最短边缘:用于过滤长度小于该值的边缘轮廓。
重新学习:当修改参数后需要点击“重新学习”按钮来获得新的边缘轮廓。
编辑选项:手动编辑模板功能,“指示”可修改当前十字点位置,点击“擦除”或“恢复”按钮后可以使用鼠标在画面中对着边缘轮廓进行擦除或者恢复,上图中蓝色轮廓部分为被擦除,绿色部分为正在使用的边缘轮廓。
画笔大小:设置擦除或者恢复画笔的尺寸大小。
标记点:画面中红色十字标为模板的标记点,在“指示”模式下可以使用鼠标点击选取并拖动调整位置。
装载模板:从文件中加载模板数据。
保存模板:将模板数据保存到文件中。
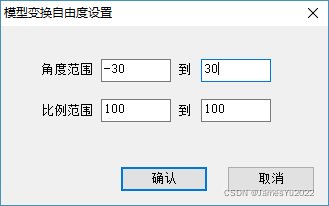
设置自由度,
角度范围:匹配目标相对于模板可能存在的最小角度,值范围-180到180。
比例范围: 匹配目标相对于模板可能存在的最小比例,值范围80到120 ( 原始比例值100 )。
设置搜索范围:在图像上画出一个红色的ROI矩形框,该矩形框为搜索目标是的搜索范围,如果是全图搜索可以不用设置。
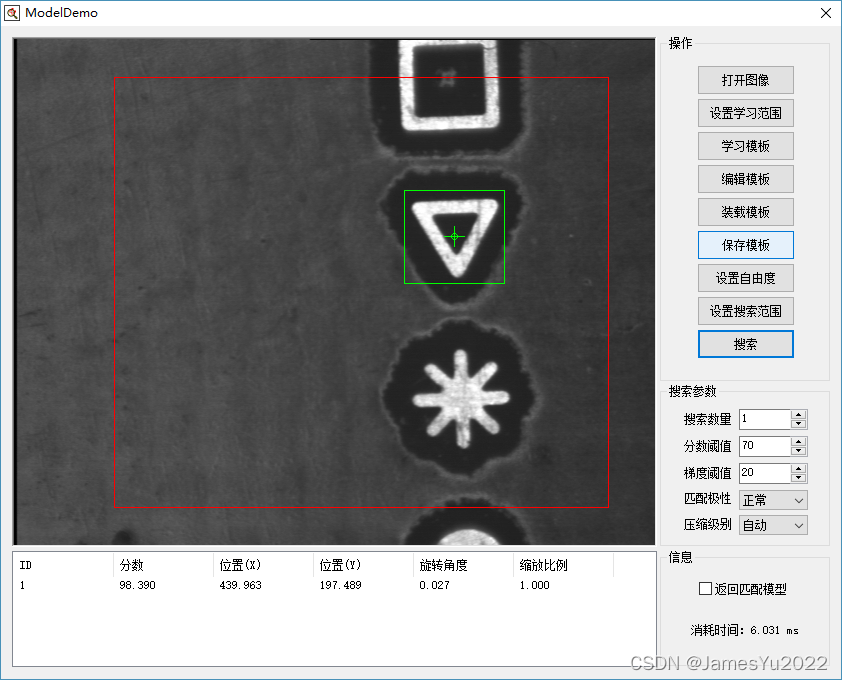
搜索数量:最多被允许搜索到的目标数量。
最小分数:分数表示目标和模板的相似程度,分数越高越相似,最大值100表示完全匹配,目标分数必须大于该值才会被搜索到,该参数值将会影响搜索速度。
梯度阈值:提取边缘轮廓时使用的参数,当边缘对比度较差时需要降低梯度阈值,如果目标边缘清晰,则可以设置比较高,取值范围0~255,一般设为40左右,该参数值将会影响搜索速度。
匹配极性:可以设置正常和反转,正常表示目标和模板极性相同,反转则表示相反。
压缩级别:在搜索过程中对图像进行压缩处理可以提升搜索速度,但也会降低识别率(影响程度跟模板和目标图像背景复杂度有关),一般采用“自动”设置。
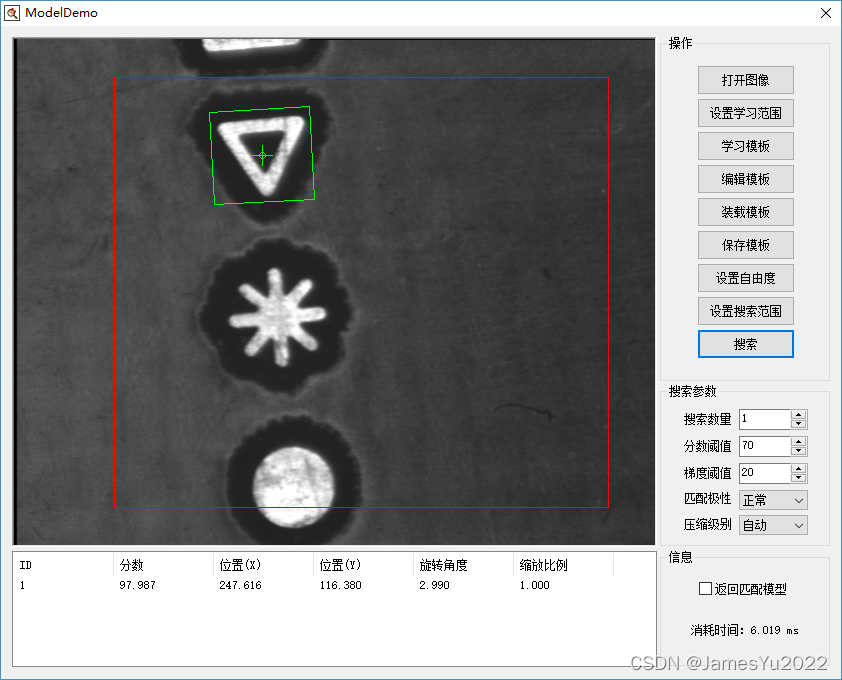
分数:匹配目标与模板的相似度。
位置:匹配目标相对于当前图像的坐标位置。
角度:匹配目标相对于模板的旋转角度。
比例:匹配目标相对于模板的缩放比例。
ModelDemo模板轮廓匹配定位(老版本)
在 StdAfx.h 的头文件中添加CKVISION相关定义
#include "..\\..\\Includ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 884
884

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









