









遥感影像阴影检测原理详解及其代码实现(基于HSV彩色模型与C1C2C3彩色模型)
一、阴影检测原理
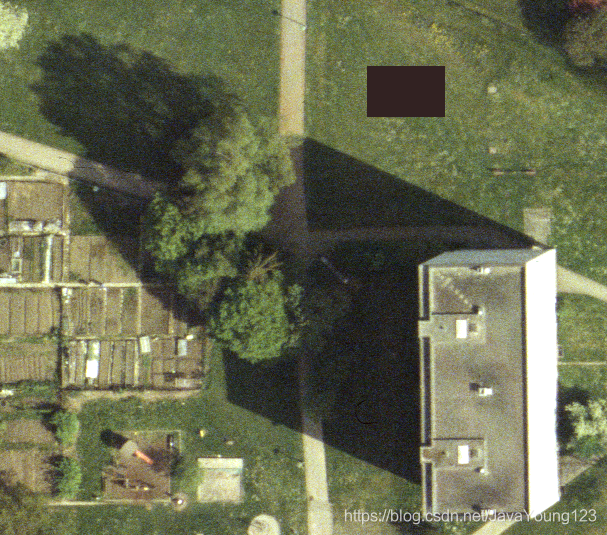
遥感影像中的阴影是指一些地物(如建筑物、树木和山脉等)遮挡了太阳光线,导致在地物的背面形成了黑暗的成像区域。阴影区域既是遥感影像的信息源,可以反映建筑物高度,估算建筑物的容积率和提取三维信息;又是遥感影像的噪声源,导致地物特征受到影响,进而影响地物信息的提取。
例如,在下图中,可以发现在房屋背后存在阴影区域,我们的目标就是要检测出这块阴影。
(1)基于HSV彩色空间的阴影检测
HSV模型是基于色调(H)、饱和度(S)和明度(V)的六棱锥颜色空间。(如下图所示)H表示色彩信息,即所处的光谱颜色的位置,用角度表示;S表示成所选颜色的纯度和该颜色最大的纯度之间的比率;V表示色彩的明亮程度。
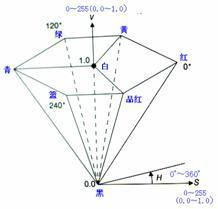
在HSV模型中,阴影区域主要有三个特点:
①具有更大的色调值H;
②具有高饱和度S,因为散射光线主要来自波长更短的蓝紫色光;
③太阳光线被阻挡,导致明度V较低。
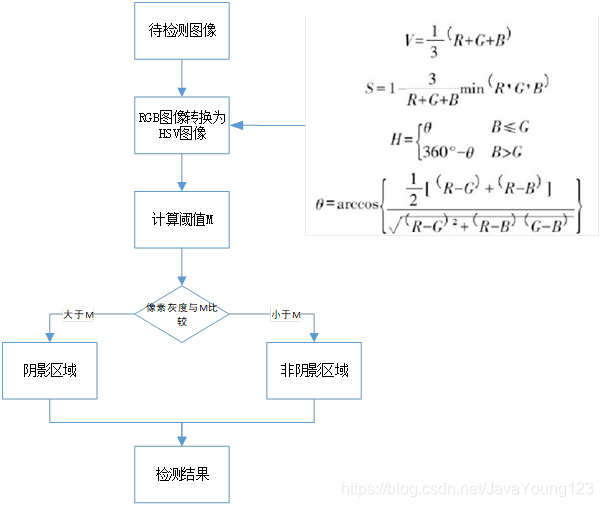
根据HSV模型阴影区域的特点,可以将彩色的RGB图像转换为HSV图像
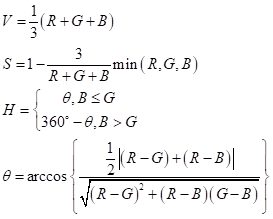
选取 作为阈值初步分割出阴影区域。
作为阈值初步分割出阴影区域。
(2)基于C1C2C3彩色空间的阴影检测
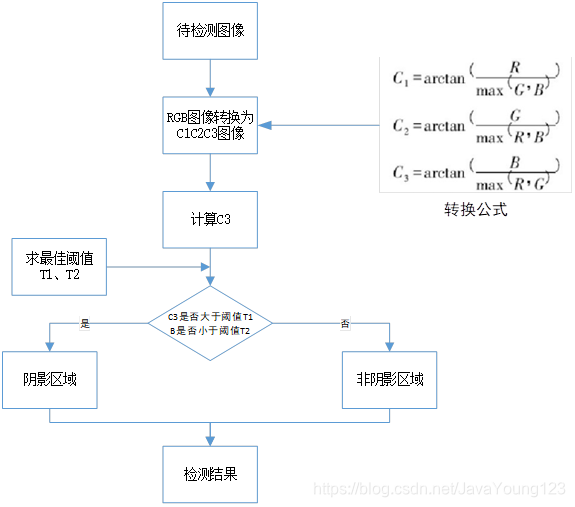
与HSV模型类似,可以引入C1C2C3彩色模型实现对遥感影像阴影区域检测
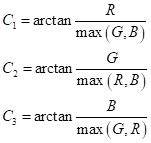
阴影区域中的像素灰度值一般比非阴影区域小,特别是R和G分量较小,但是B分量较大,其原因主要是在以太阳光为光源的成像过程中,环境对蓝色分量的散射较强所致。并且,在阴影区域中,C3分量具有很高的像素值。因此,需要将C3分量和B分量结果,采用双阈值进行阴影检测。只有C3分量高于阈值T1,B分量低于阈值T2,才被认为是阴影区域。
二、基于OpenCV的C++代码实现
首先,将RGB图像转换为HSV图像和C1C2C3图像,计算出每一个分量。然后,使用迭代法或Otsu算法求出最佳阈值,并进行阈值分割。最后,对图像进行形态学闭运算,优化检测结果,获得精确的阴影区域。
(1)基于HSV彩色空间的阴影检测
基于RGB到HSV彩色空间的公式,计算出H、S、V每一个分量。然后,使用迭代法求出最佳分割阈值。经过多次的迭代运算后,发现最佳阈值T约为0.2。计算出M分量,与T进行比较,划分图像为目标阴影区域或非阴影区域。
代码如下:
void Shadow_detection_HSV(Mat img)
{
int width = img.cols;
int height = img.rows;
Mat dst;
dst.create(height, width, CV_8UC1);
cvtColor(img, dst, CV_RGB2HSV);
unsigned char *p1 = dst.data;
unsigned char *p = img.data;
double h, s, v, m;
for (int i = 0; i < height; i++)
{
for (int j = 0; j < width; j++)
{
h = p[(i * width + j) * 3 + 0];
s = p[(i * width + j) * 3 + 1];
v = p[(i * width + j) * 3 + 2];
m = double(((s - v) / (h + s + v)));
if (m > 0.2)
{
p1[i * width + j] = 255;
}
else
{
p1[i * width + j] = 0;
}
}
}
imwrite(".\\Color-hsv.png", dst);
}
(2)基于C1C2C3彩色空间的阴影检测
算法流程与HSV模型类似,但不同的是C1C2C3模型需要计算两个阈值,分别是C3分量和B分量的阈值。迭代法求双阈值,然后进行阈值分割。
代码如下:
void Shadow_detection_C1C2C3(Mat img)
{
int row, col;
row = img.rows;
col = img.cols;
double c3;
for (int j = 0; j < row; j++)
{
for (int i = 0; i < col; i++)
{
if (img.at<cv::Vec3b>(j, i)[2] > img.at<cv::Vec3b>(j, i)[1])
{
c3 = atan(double(img.at<cv::Vec3b>(j, i)[0] / img.at<cv::Vec3b>(j, i)[2]));
}
else
{
c3 = atan(double(img.at<cv::Vec3b>(j, i)[0] / img.at<cv::Vec3b>(j, i)[1]));
}
if (c3 > 0.15&&img.at<cv::Vec3b>(j, i)[0] < 50)
{
img.at<cv::Vec3b>(j, i)[0] = 255;
img.at<cv::Vec3b>(j, i)[1] = 255;
img.at<cv::Vec3b>(j, i)[2] = 255;
}
else
{
img.at<cv::Vec3b>(j, i)[0] = 0;
img.at<cv::Vec3b>(j, i)[1] = 0;
img.at<cv::Vec3b>(j, i)[2] = 0;
}
}
}
imwrite(".\\Color-c1c2c3.png", img);
}
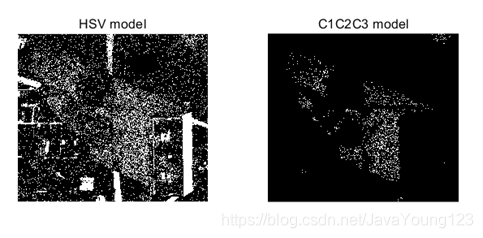
检测效果如下:
三、优化方法
为获得更加精确的阴影区域,改进方法:
①面积阈值判断。计算各独立阴影区域的面积大小,如果小于一个给定的面积阈值,就认为其属于非阴影区域内部的具有较低亮度的地物,并去除这样的小区域。
②形态学闭运算。对阴影检测的初步结果进行形态学闭运算,将细微的阴影区域连接到一起。

















 1009
1009

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









