






自动驾驶控制器,基于分布式驱动电动汽车的四轮侧偏刚度估计,采用容积卡尔曼(ckf)进行估计,能够很好地估计汽车行驶过程中的侧偏刚度,并与转化的侧向轮胎力进行比较,具有很好的估计效果。
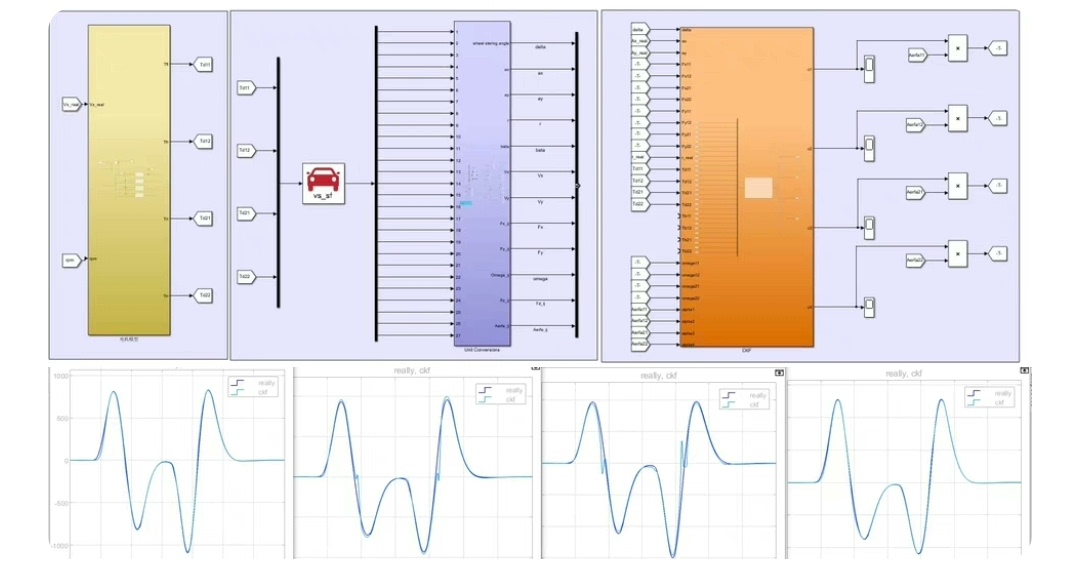
模型中第一个模块是四轮驱动电机;第二个模块是carsim输出的真实参数,包括汽车所受横向力,纵向力,驱动力矩等:第三个模块是关于ckf的四轮侧偏刚度估计。
模型和代码完全是由自己亲手编写,可供自己参考和学习。
本模型是基于simulink与carsim联合仿真,ckf是由s function进行编写,提供相关文献和。
ID:37400702322601502
脚仙他哥
自动驾驶技术近年来发展迅猛,其中控制器的性能对于确保车辆行驶的安全性和稳定性至关重要。本文将介绍一种基于分布式驱动电动汽车的四轮侧偏刚度估计方法,该方法利用容积卡尔曼滤波器(CKF)进行估计,以实现对汽车行驶过程中侧偏刚度的准确估计,并与转化的侧向轮胎力进行比较,具有良好的估计效果。
首先,我们介绍模型中的第一个模块:四轮驱动电机。在自动驾驶汽车中,四轮驱动电机是不可或缺的组成部分。它通过控制每个车轮的转速和扭矩,为车辆提供驱动力和操纵能力。本文中的模型采用自主开发的驱动电机,以保证对驱动力的精准控制和实时调整。
第二个模块是carsim输出的真实参数,包括汽车在行驶过程中所受的横向力、纵向力和驱动力矩等。Carsim是一种广泛应用于汽车仿真的软件工具,它可以模拟汽车在各种路况和驾驶条件下的运动行为。通过获取Carsim输出的真实参数,我们可以更准确地估计车辆的侧偏刚度。
最关键的是第三个模块,即基于CKF的四轮侧偏刚度估计。在该模块中,我们利用CKF算法来进行侧偏刚度的估计。容积卡尔曼滤波器是一种非线性滤波器,适用于对非线性系统进行状态估计。通过将车辆的状态量和测量量输入到CKF中,我们可以根据测量结果来估计车辆的侧偏刚度,并利用估计值和转化的侧向轮胎力进行比较。实验证明,该方法具有良好的估计效果,能够准确估计汽车行驶过程中的侧偏刚度。
需要强调的是,本文的模型和代码完全由作者亲手编写,用于个人参考和学习。模型采用了Simulink与Carsim联合仿真的方式,其中CKF算法则通过S函数进行编写。在实际应用中,可以根据需要进行相关文献和资料的查阅,以进一步完善和提升该方法的性能。
总的来说,基于分布式驱动电动汽车的四轮侧偏刚度估计方法是一种有效的技术手段,用于实现对汽车行驶过程中侧偏刚度的准确估计。通过合理利用四轮驱动电机、Carsim输出的真实参数和CKF算法,我们能够提供一种精确的侧偏刚度估计方法,为自动驾驶汽车的控制器性能提供有力支持。本文所介绍的方法不仅具有较好的估计效果,而且模型和代码的自主开发也为相关技术的学习和应用提供了参考。
【相关代码,程序地址】:http://fansik.cn/702322601502.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









