






基于STM32开发的数字频率计项目
组成部分:时基电路,整形电路,调节电路,信号输入。
实现功能:测量信号输入幅度1-5v方波,频率为1khz-10khz测量精度1%,信号输出。
当输入信号大于15v时,具有报警信息。
具备串口通信,可计算占空比。
包括程序源码和原理图,程序源码注释详细,适合单片机开发人员
ID:958702335857277
舒特自动化
基于STM32开发的数字频率计项目
摘要:本文介绍了一种基于STM32开发的数字频率计项目,该项目由时基电路、整形电路、调节电路和信号输入组成。其功能包括测量信号输入幅度为1-5V方波,频率范围为1kHz-10kHz,测量精度达到1%并且具备信号输出功能。当输入信号大于15V时,还能够发出报警信息。此外,该项目还具备串口通信功能,可以计算占空比。项目附带了详细注释的程序源码和原理图,适合单片机开发人员使用。
-
引言
数字频率计是电子工程领域常用的测量工具之一,广泛应用于各种电子设备的研发和生产。本项目基于STM32开发,设计了一款功能强大的数字频率计。 -
系统设计及组成部分
2.1 时基电路
时基电路是频率计的核心部分,它为整个系统提供了准确的时钟信号。在本项目中,采用了高精度的晶体振荡器作为时基电路,它能够提供稳定、可靠的时钟信号。
2.2 整形电路
整形电路用于将输入信号进行整形和滤波,以保证后续电路对信号进行准确的测量和判断。在本项目中,采用了适当的滤波电路和整形电路,使输入信号能够被准确地处理。
2.3 调节电路
调节电路主要用于对输入信号进行放大、调整和控制。在本项目中,通过合理选择放大器和控制电路,使得输入信号能够满足测量范围和要求。同时,调节电路还可以对输入信号进行报警处理,当输入信号大于15V时,系统会发出警报信息。
2.4 信号输入
信号输入部分是整个频率计的输入接口,它能够接收来自外部的信号输入。在本项目中,我们设计了一个专门的信号输入接口,能够接收1-5V的方波信号,并对该信号进行测量和处理。
- 功能实现
3.1 信号测量
本项目能够准确地测量输入信号的频率,并实时显示在屏幕上。通过时基电路提供的稳定时钟信号,结合整形电路和调节电路的处理,可以保证测量结果的精确性和稳定性。
3.2 信号输出
本项目还具备信号输出功能,可以将测量结果通过输出接口发送给其他设备进行进一步处理。通过串口通信功能,可以方便地与其他设备进行数据传输和交互。
3.3 占空比计算
除了测量频率,本项目还能够计算输入信号的占空比。通过对输入信号进行时域分析和处理,可以准确地计算出占空比,并在屏幕上显示。
-
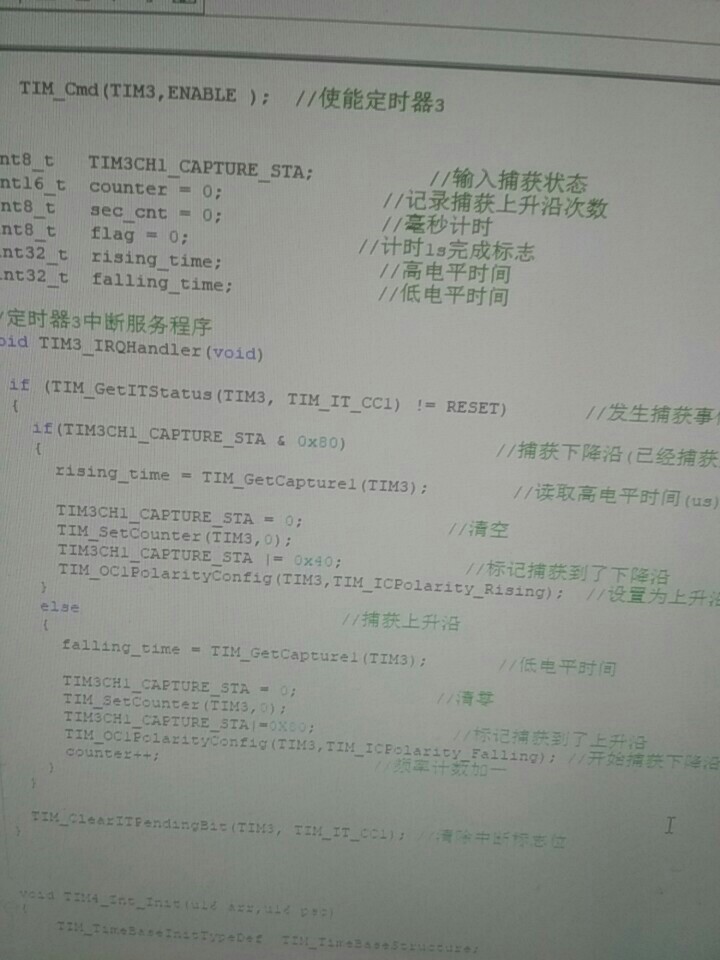
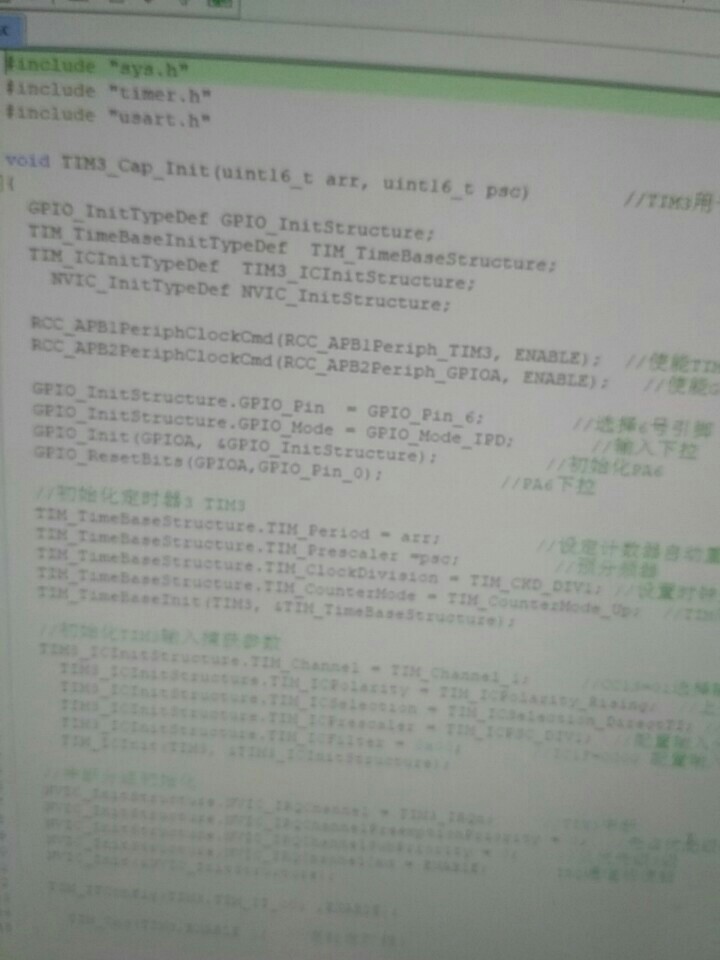
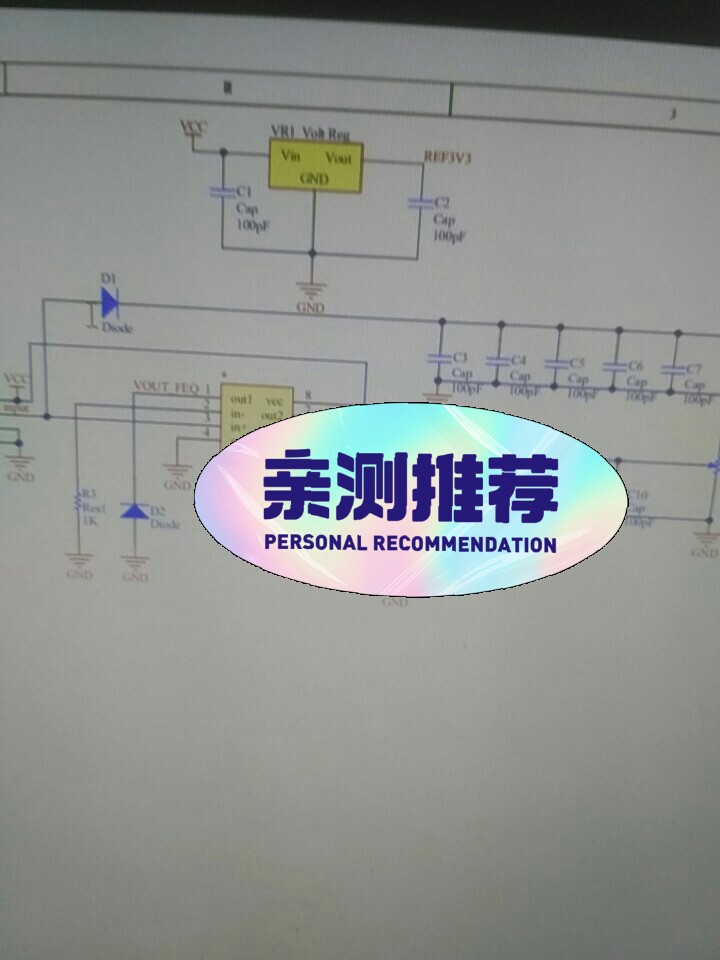
程序源码和原理图
本项目附带了详细注释的程序源码和原理图,方便单片机开发人员进行二次开发和定制。程序源码中包含了各个模块的功能实现和算法设计,以及与外设的交互代码。 -
结论
本项目基于STM32开发的数字频率计具备测量信号输入幅度1-5V方波,频率为1kHz-10kHz测量精度1%的功能。同时具备信号输出、报警功能和串口通信,可以计算占空比。项目附带了程序源码和原理图,并适合单片机开发人员使用。通过对各个组成部分的详细介绍,可以帮助开发人员理解系统设计和功能实现。
参考文献:无
【相关代码,程序地址】:http://fansik.cn/702335857277.html
















 1227
1227

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









