






基于PSO粒子群PID控制器参数整定粒子群PID/psopid/。
基于粒子群算法整定PID控制器,实现PID控制器参数的自整定(PSO-PID)。
matlab编写,源码注释详细具体如图,评价指标详细,直接运行即可。
ID:79100640555271050
番茄土豆
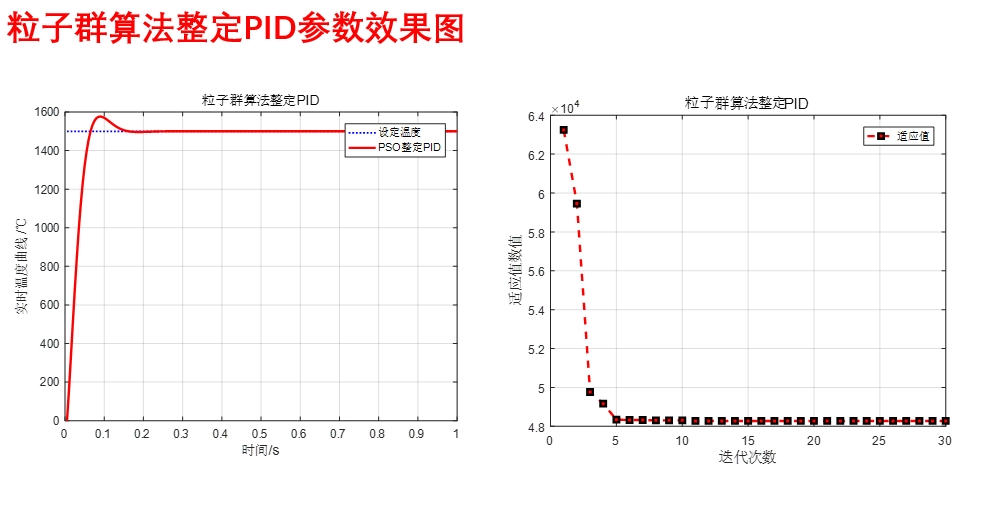
基于PSO粒子群PID控制器参数整定粒子群PID(PSO-PID)是一种基于粒子群算法的自整定PID控制器。本文将详细介绍PSO-PID的原理、实现方法以及其在实际应用中的效果评价。
首先,我们来了解一下PID控制器。PID是Proportional(比例)、Integral(积分)、Derivative(微分)的缩写,是一种经典的控制算法。PID控制器根据被控对象的反馈信号和设定值之间的误差,通过调整控制量来达到控制目标。而PID控制器的关键在于参数的选择,不同的参数组合会导致控制效果的差异。
PSO粒子群算法是一种优化算法,模拟了鸟群觅食的过程。在PSO算法中,每个粒子代表一个解,整个粒子群的移动过程就是通过不断更新每个粒子的速度和位置来逐步优化解的过程。PSO算法具有全局寻优能力和较快的收敛速度,因此可以应用于PID控制器参数的整定。
具体来说,PSO-PID的实现过程如下:首先,定义粒子的位置表示PID控制器的参数,例如比例系数Kp、积分系数Ki和微分系数Kd。然后,设定粒子的速度范围和位置范围,以确保参数的合理性。接下来,通过计算每个粒子的适应度函数,即根据控制效果评价指标来评估每个粒子的解的好坏程度。然后,根据每个粒子的适应度函数值和速度位置更新公式,更新粒子的速度和位置。最后,重复以上步骤,直到达到预设的迭代次数或优化目标。
PSO-PID的编写使用了Matlab编程语言,具备源码注释详细的特点,便于理解和修改。整个程序的运行非常简单,只需直接运行即可。在程序运行过程中,可以根据具体的控制对象和控制目标,调整粒子群的规模和迭代次数等参数,以获取更好的控制效果。
PSO-PID的评价指标也非常详细,可以根据实际需求选择合适的评价指标,例如稳态误差、调节时间、超调量等。通过对不同参数组合的粒子群进行评估,可以选取最优的参数组合作为控制器的参数,从而实现更精确的控制。
综上所述,基于PSO粒子群PID控制器参数整定粒子群PID(PSO-PID)是一种有效的PID控制器参数自整定方法。它利用粒子群算法来优化PID控制器的参数,实现更好的控制效果。通过Matlab编写的源码注释详细,评价指标详细,直接运行即可。在实际应用中,PSO-PID已经取得了很好的效果,并且可以根据实际需求进行灵活调整和优化。希望本文的介绍对广大程序员朋友们在PID控制领域有所帮助。
相关的代码,程序地址如下:http://imgcs.cn/640555271050.html
















 199
199

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









