







用不严谨的话来讲,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边型,它能包含点集中所有的点。
题意:给出n个点 n<=1e3和长度l,求出包围n个点的最小凸多边形周长 && 多边形距离这n个点的距离>=L?
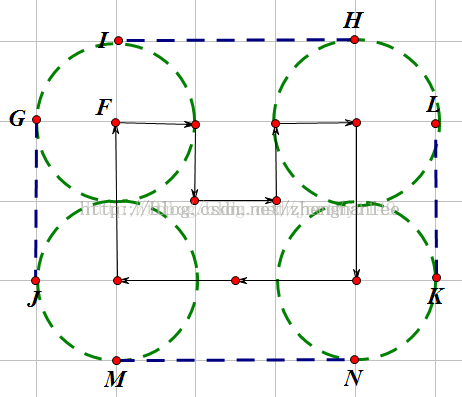
若不考虑L 则答案为凸包的周长,考虑条件L,由如下图形 答案为:凸包周长+以L为半径的圆的周长
求凸包用的是 Graham's Scan法
可以根据归纳法来证明,栈中保存的是前i-1个点集的凸包的极点
因为按极角排序后,若(p[i],栈顶,次栈顶)叉积<=0 则栈顶在(p[0],p[i],次栈顶)构成的三角形内部,栈顶不为前i个点集形成的凸包的极点. 淘汰栈顶直到条件成立,扫描O(n) 排序O(nlogn)
#include <iostream>
#include <cstdio>
#include <algorithm>
#include <cmath>
#include <cstring>
using namespace std;
const int N=2e5+20;
const double PI=acos(-1.0);
struct point{
int x,y;
}p[N];
int n;
int stack[N],top;
int cross(point p0,point p1,point p2)//p0p1 * p0p2叉积 判断顺/逆时针
{
return (p1.x-p0.x)*(p2.y-p0.y)-(p1.y-p0.y)*(p2.x-p0.x);
}
double dis(point p1,point p2)
{
return sqrt((double)(p2.x-p1.x)*(p2.x-p1.x)+(p2.y-p1.y)*(p2.y-p1.y));
}
bool cmp(point p1,point p2)//极角排序 p[0]为最下方&&最左边的点
{
int tmp=cross(p[0],p1,p2);
if(tmp>0) return true;
else if(tmp==0&&dis(p[0],p1)<dis(p[0],p2)) return true;//角度相同,距离小在前
else return false;
}
void Graham(int n)//求凸包
{
int i;
if(n==1){top=0;stack[0]=0;}
if(n==2)
{
top=1;
stack[0]=0;
stack[1]=1;
}
if(n>2)
{
for(int i=0;i<=1;i++) stack[i]=i;
top=1;
for(int i=2;i<n;i++)//O(2n) 求出前i个点集形成的凸包
{
//可以根据归纳法来证明,栈顶~0为前i-1个点集的凸包的顶点
//因为按极角排序后,若叉积<=0 则栈顶在(p[0],p[i],次栈顶)构成的三角形内部,栈顶不为前i个点集形成的凸包的极点.
while(top>0&&cross(p[stack[top-1]],p[stack[top]],p[i])<=0)
top--;
top++;
stack[top]=i;
}
}
}
int main()
{
double L;
while(cin>>n>>L)
{
int low=0;
for(int i=0;i<n;i++)
{
cin>>p[i].x>>p[i].y;
if((p[low].y==p[i].y&&p[low].x>p[i].x)||p[low].y>p[i].y)
low=i;
}
swap(p[0],p[low]);//p[0]为最下方&&最左边的点
sort(p+1,p+n,cmp);
Graham(n);
double res=0;
for(int i=0;i<top;i++)
res+=dis(p[stack[i]],p[stack[i+1]]);
res+=dis(p[stack[0]],p[stack[top]]);
res+=2*PI*L;
printf("%d\n",int(res+0.5));//四设五入
}
return 0;
}















 312
312

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









