






西门子博图1214c组态的运动控制学习案列,画圆,画方,相对运动,绝对运动,点动回原点,注释全面,博图v15.1版本
YID:664655024197295
爱吃多彩花菜的少年


西门子博图1214c组态的运动控制学习案列,是一项颇具挑战性和实用性的技术实践。在这个案例中,我们将探索如何使用西门子博图1214c组态进行运动控制,并实现画圆、画方、相对运动、绝对运动、点动回原点等功能。通过详细讲解和全面的注释,我们将带您深入了解这一组态的操作,并提供博图v15.1版本的相关信息。
首先,我们将介绍西门子博图1214c组态的基本概念和功能。博图1214c组态是一种高效且易于使用的运动控制工具,它基于西门子的先进技术和丰富的经验积累,为用户提供了强大的运动控制能力。通过博图1214c组态,用户可以轻松实现各种运动控制任务,包括复杂的轨迹生成、运动规划和轴控制等。
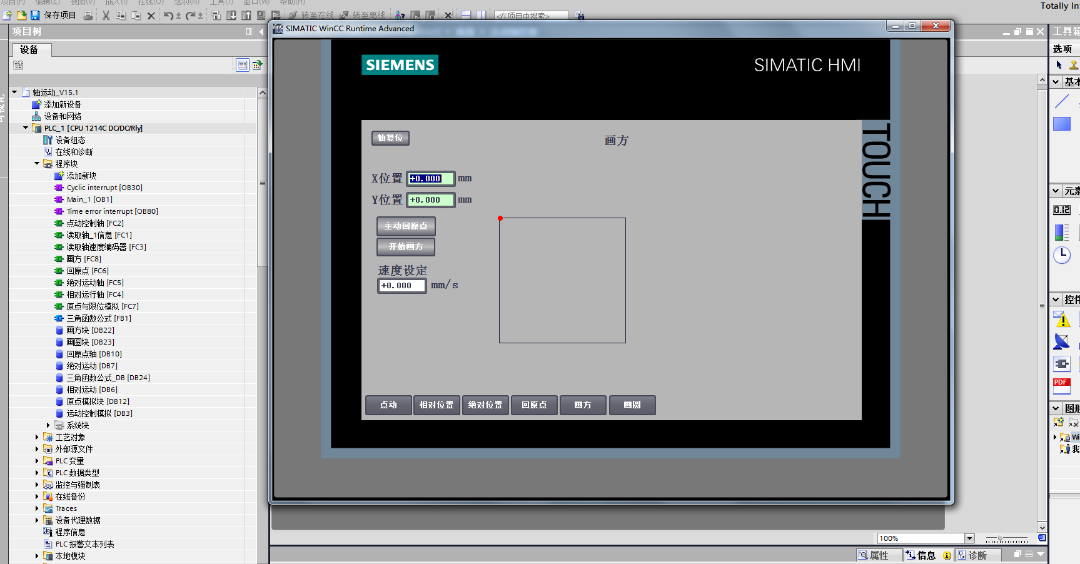
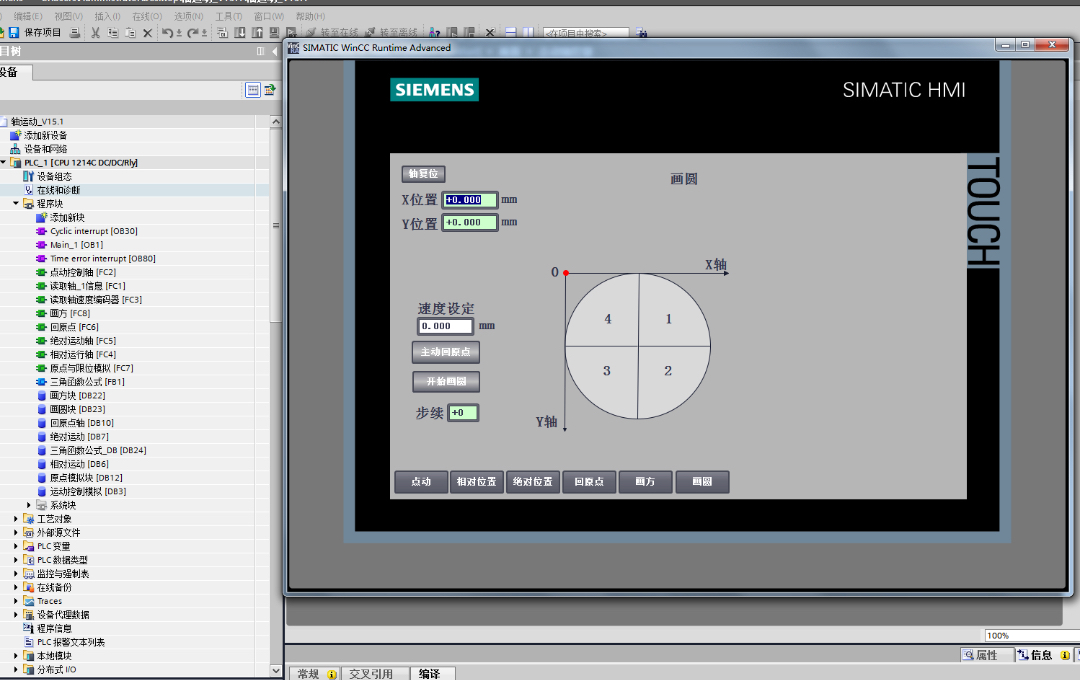
在学习案例中,我们将重点讨论如何使用博图1214c组态实现画圆和画方的功能。画圆和画方是常见的运动控制任务,对于了解西门子博图1214c组态的使用非常有帮助。我们将详细介绍如何配置运动控制参数、设置运动轨迹、调整运动速度和加速度等关键步骤,帮助读者快速掌握这些功能的实现方法。
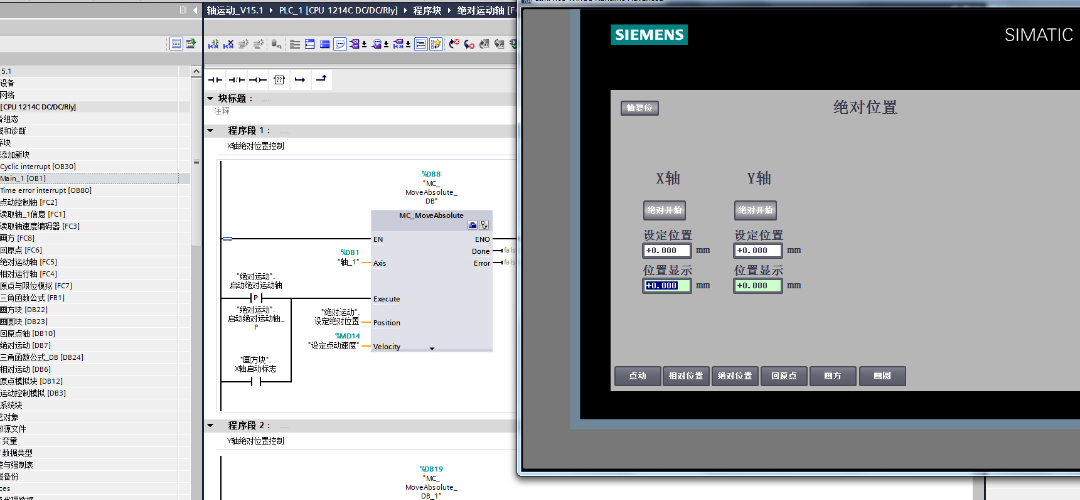
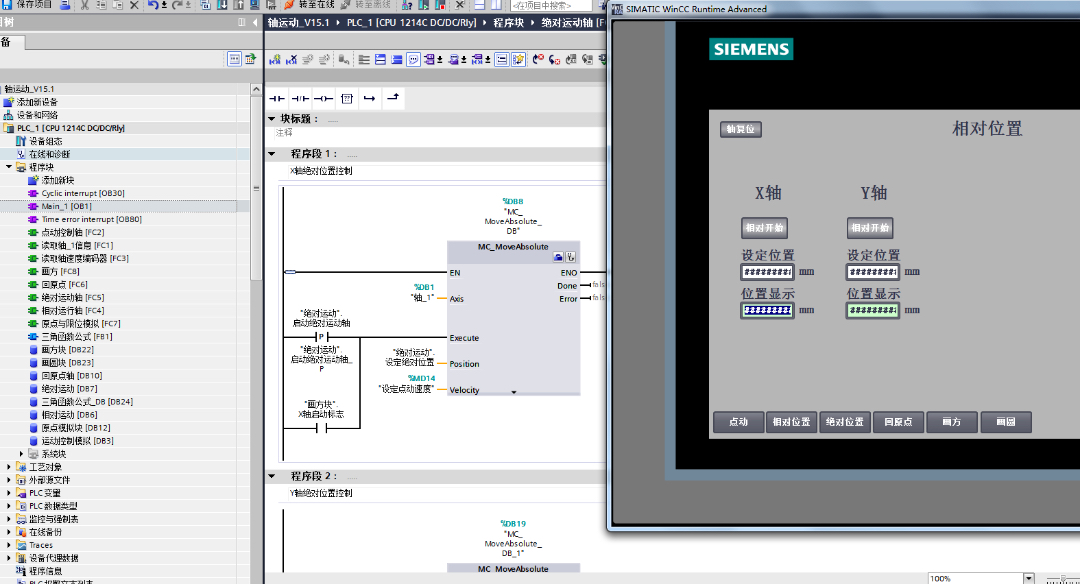
除了画圆和画方,我们还将介绍相对运动和绝对运动的概念和使用方法。相对运动和绝对运动是运动控制中常用的两种模式,它们分别适用于不同的应用场景。我们将通过实例演示如何在博图1214c组态中配置相对运动和绝对运动参数,并详细解释它们的区别和使用方法,帮助读者更好地理解和应用这两种模式。
此外,我们还将介绍点动回原点的实现方法和注意事项。点动回原点是运动控制中常见的功能,它可以使运动轴回到指定的起始位置,保证运动控制的准确性和稳定性。在学习案例中,我们将讲解如何配置点动回原点参数、设置回原点速度和回原点方式,并注意事项如何避免碰撞和坐标误差等问题。
最后,我们将全面注释博图1214c组态的相关功能和参数,帮助读者更好地理解和应用这一工具。注释是学习和使用博图1214c组态的重要辅助工具,通过详细解释每个参数和功能的作用,读者可以更加准确地配置运动控制参数,并避免一些常见的配置错误。
综上所述,西门子博图1214c组态的运动控制学习案例提供了一种实用且全面的学习方法,帮助读者快速掌握博图1214c组态的运动控制功能。通过本文的讲解和实例演示,读者可以深入了解博图1214c组态的具体操作步骤和常见应用场景,并在实际项目中灵活运用。希望本文对读者的学习和工作有所帮助,促进技术交流和进步。
注:本文基于博图v15.1版本进行讲解和示范,读者可以根据自己的实际情况进行相应的配置和操作。
相关的代码,程序地址如下:http://coupd.cn/655024197295.html
















 503
503

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









