






西门子1200三轴机械手结构化编程5轴伺服项目
项目实现功能:
1.三轴机械手X轴-Y轴-Z轴联动取放料PTO脉冲定位控制台达B2伺服
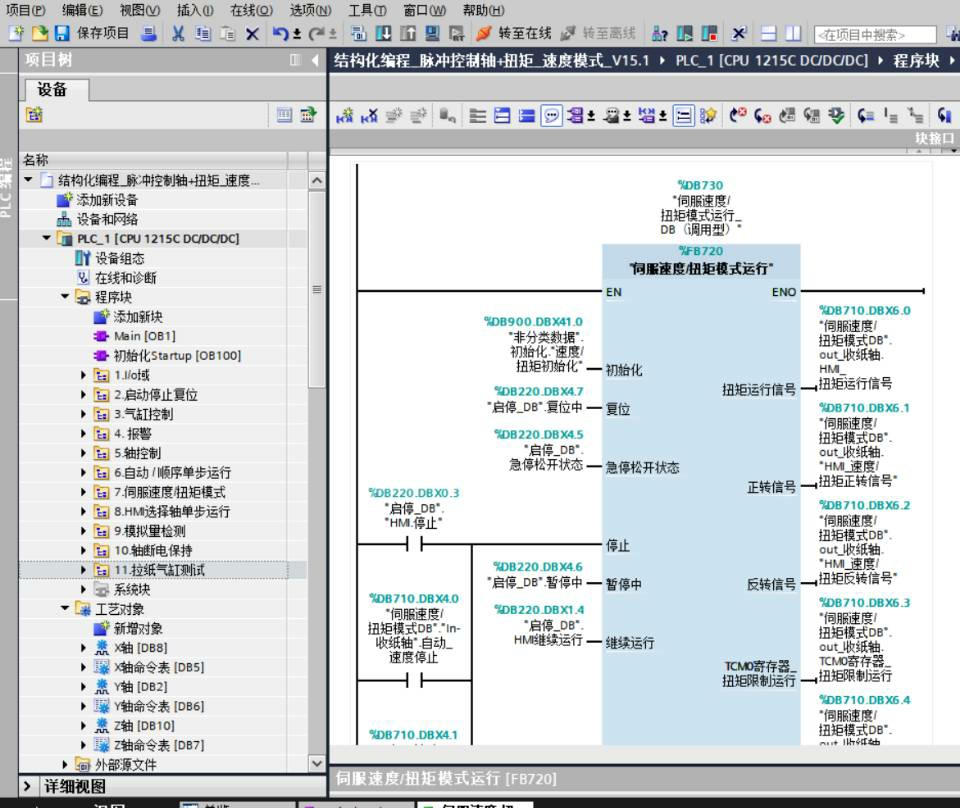
2.台达伺服速度模式应用+扭矩模式应用实现收放卷
3.程序为结构化编程,每一功能为模块化设计,功能:自动_手动_单步_暂停后原位置继续运行_轴断电保持_报警功能_气缸运行及报警.
4.每个功能块可以无数次重复调用,可以建成库,用时调出即可
5.上位机采样威纶通触摸屏
6.参考本案例熟悉掌握结构化编程技巧,扩展逻辑思维,借鉴本案例实现自己得第一个项目
PLC程序,触摸屏程序,
博图V14以上都可以
ID:288655059248933
工控自动化PLC


西门子1200三轴机械手结构化编程5轴伺服项目
引言:在现代工业生产中,机械手作为一种自动化设备,广泛应用于各个领域。为了实现机械手的高效运行和精准控制,我们研发了基于西门子1200 PLC和台达伺服的三轴机械手结构化编程5轴伺服项目。该项目通过控制台的PTO脉冲定位,实现了机械手的取放料功能,并运用了台达伺服的速度模式和扭矩模式,实现了收放卷操作。通过结构化编程,每一功能均以模块化设计,包括自动、手动、单步、暂停后原位置继续运行、轴断电保持、报警功能、气缸运行及报警等功能。此外,每个功能块可无数次重复调用,并可以建成库,提高了程序的可重用性。上位机采用了威纶通触摸屏,方便操作和监控。本文将介绍该项目的详细设计与实现,并提供了一个案例作为技术思路的借鉴,帮助读者扩展逻辑思维,实现自己的第一个项目。
第一部分:项目背景和功能需求
在工业自动化生产中,机械手的应用越来越广泛。为了满足某个特定工艺的需求,我们研发了该三轴机械手结构化编程5轴伺服项目。该项目的主要功能需求包括:
- 三轴机械手X轴-Y轴-Z轴联动取放料PTO脉冲定位控制台达B2伺服:通过联动控制三个轴的运动,实现机械手的取放料功能。
- 台达伺服速度模式应用+扭矩模式应用实现收放卷:利用台达伺服的速度模式和扭矩模式,实现收放卷操作。
- 程序为结构化编程,每一功能为模块化设计,包括自动、手动、单步、暂停后原位置继续运行、轴断电保持、报警功能、气缸运行及报警等。
- 每个功能块可以无数次重复调用,并可以建成库,用时调出即可。
- 上位机采样威纶通触摸屏:通过威纶通触摸屏实现人机交互,方便操作和监控。
- 参考本案例熟悉掌握结构化编程技巧,扩展逻辑思维,借鉴本案例实现自己的第一个项目。
第二部分:系统设计
2.1 系统组成
该项目主要由西门子1200 PLC、台达伺服、机械手和上位机组成。PLC作为控制核心,通过控制台的PTO脉冲定位控制机械手的运动。台达伺服用于实现速度模式和扭矩模式的控制。机械手通过联动控制X轴、Y轴和Z轴的运动,实现取放料功能。上位机采用威纶通触摸屏,提供人机交互界面。
2.2 PLC程序设计
为了实现结构化编程,我们将每个功能块设计为一个模块,并通过调用进行组合。具体包括自动模式、手动模式、单步模式、暂停后原位置继续运行、轴断电保持、报警功能、气缸运行及报警等功能。通过将每个功能块进行封装和分类,提高了程序的可维护性和可复用性。每个功能块可无数次重复调用
相关的代码,程序地址如下:http://coupd.cn/655059248933.html
















 1511
1511

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









