






发那科机器人二次开发 C#读取和写入数据,可以获取点位信息。
非常适合进行二次开发及制作MES系统。
ID:9529655026405018
最后一只烤鸭
在发那科机器人二次开发中,C#语言具备了很高的灵活性和可扩展性,尤其是在读取和写入数据方面,能够轻松实现获取点位信息的功能。这使得C#成为了实现发那科机器人二次开发和制作MES系统的理想选择。
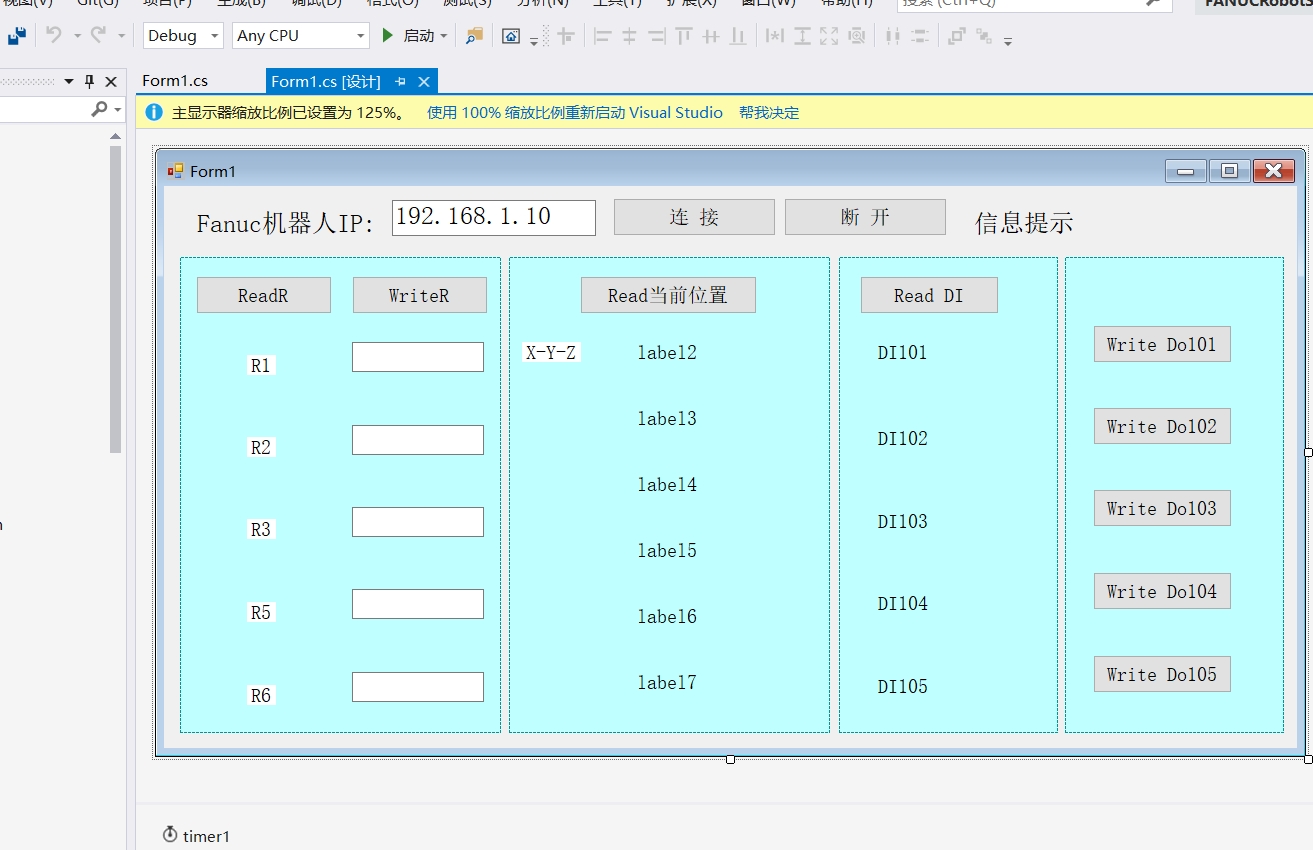
一、C#在发那科机器人二次开发中的应用
发那科机器人是目前应用广泛的工业机器人之一,它在各个行业中扮演着重要的角色。而C#作为一种面向对象的编程语言,拥有简洁、易学的特点,并且具备强大的开发工具和丰富的类库资源,因此成为了发那科机器人二次开发中的首要语言之一。
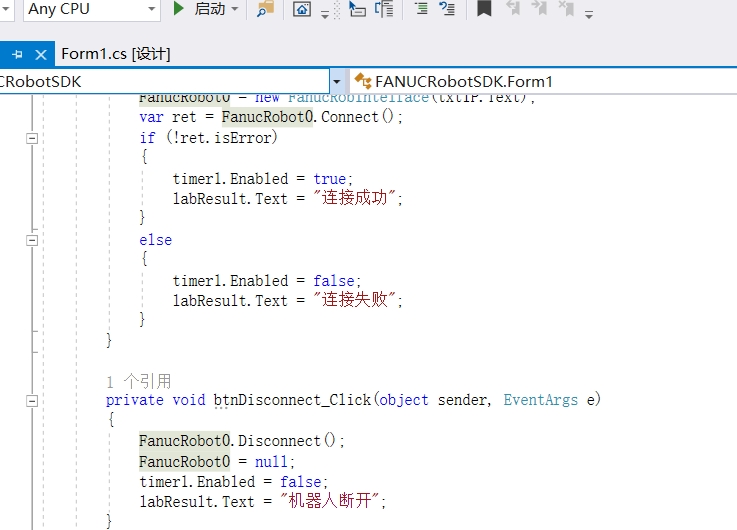
在发那科机器人二次开发中,C#可以通过发那科机器人的API接口实现与机器人的通信。通过使用C#编写的代码,我们可以轻松地读取和写入机器人的点位信息,实时监控机器人的状态,甚至可以远程操控机器人的运动和动作。这为用户提供了极大的灵活性和可定制性,有效地满足了不同行业和应用领域的需求。
二、C#读取发那科机器人的点位信息
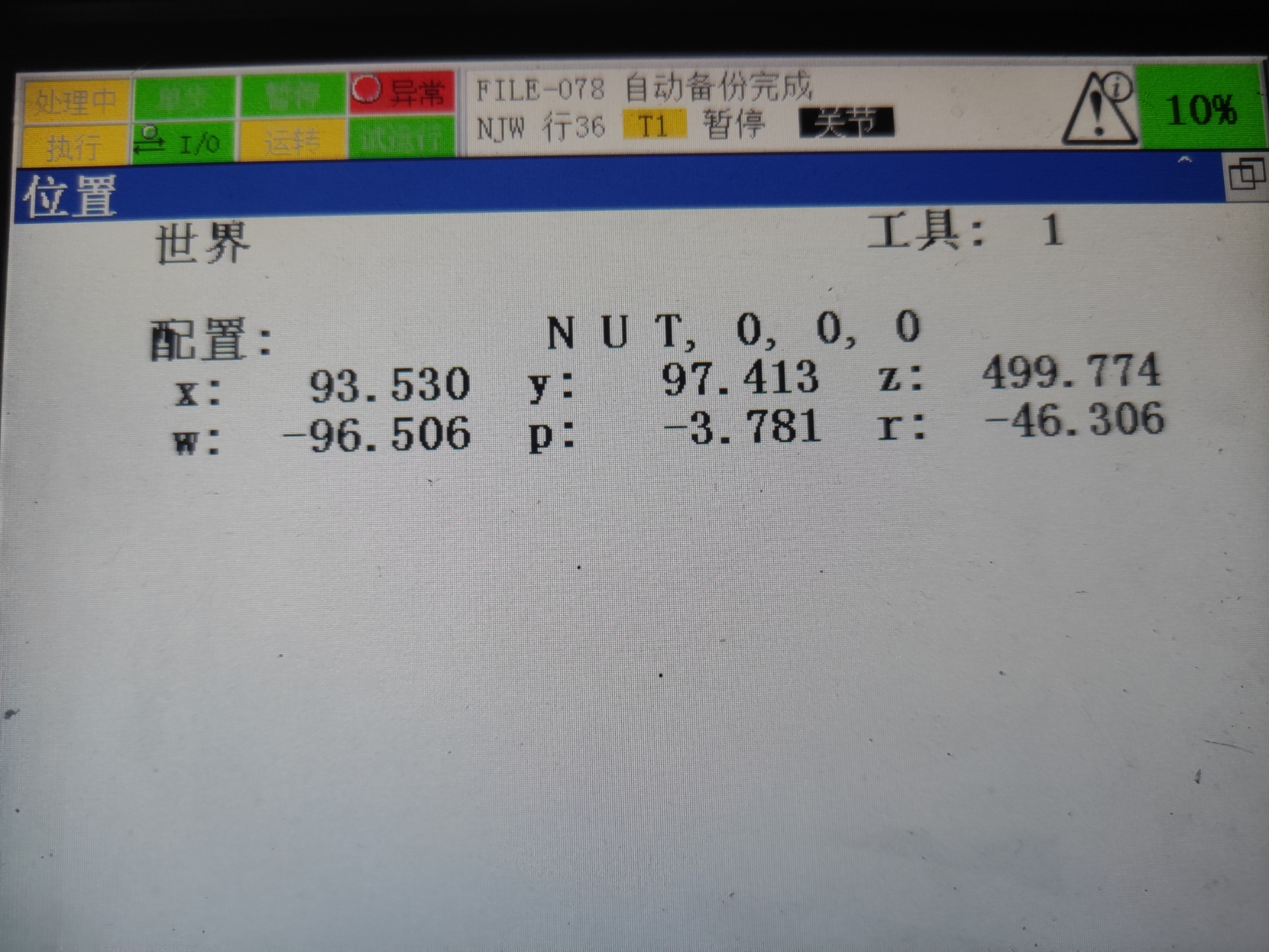
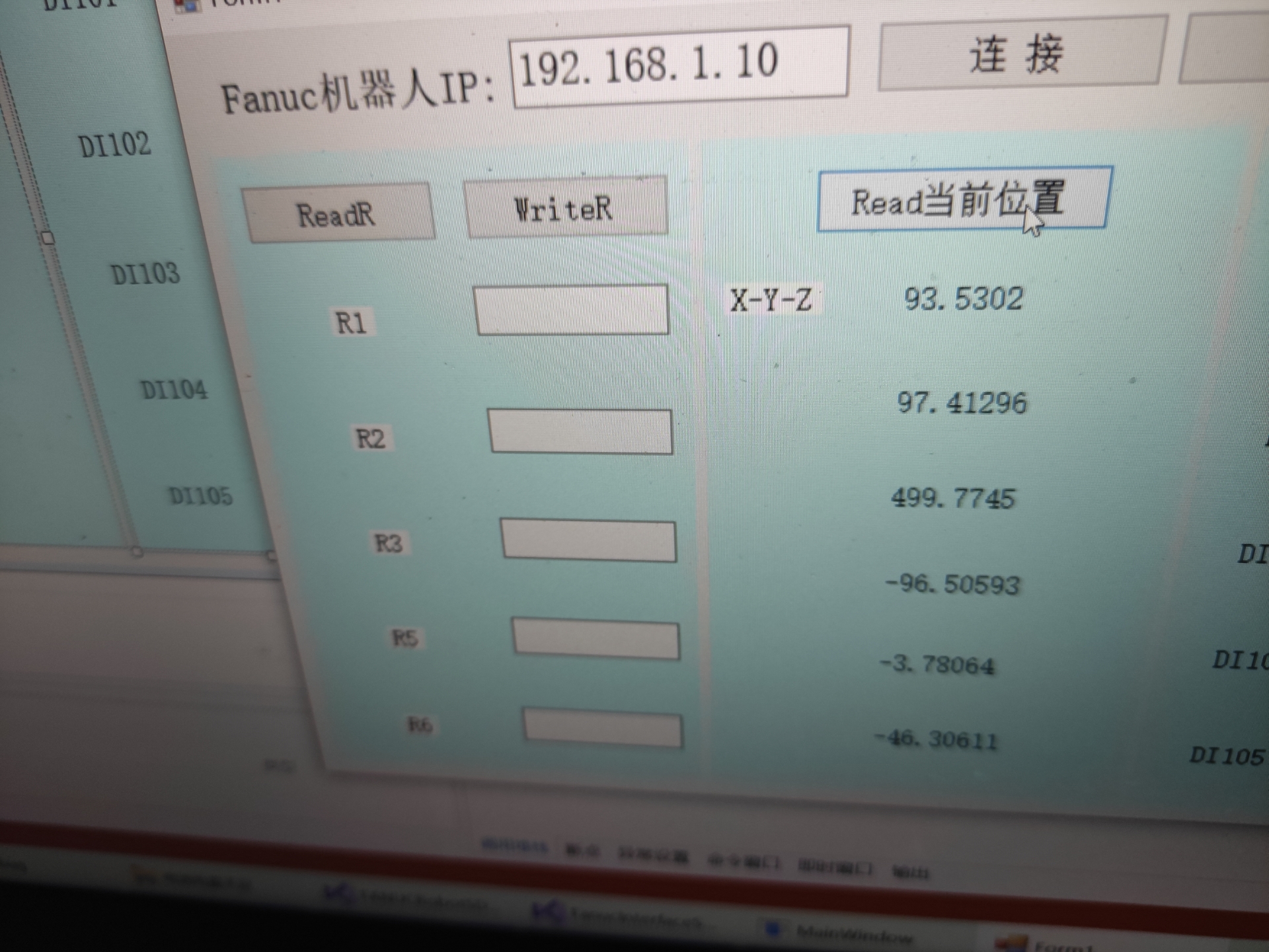
C#语言在读取发那科机器人的点位信息方面具备了很大的优势。我们可以通过发那科机器人的API接口,使用C#编写的代码,实现对机器人点位信息的读取。通过简单的几行代码,我们可以获取机器人的位置、姿态、速度等相关信息,并进行实时监控。
C#提供了丰富的网络编程库和异步操作机制,可以与发那科机器人建立起稳定的通信连接,并实时地获取机器人的点位信息。通过使用C#语言进行机器人点位信息的读取,我们可以实现机器人的远程监控和控制,为用户提供了更高效和安全的工作环境。
三、C#写入发那科机器人的点位信息
除了读取机器人的点位信息,C#语言还可以实现对发那科机器人点位信息的写入。通过编写C#代码,我们可以修改机器人的点位信息,实现对机器人运动轨迹的控制和优化。
使用C#写入机器人的点位信息,我们可以实现对机器人动作的精确控制。通过C#语言提供的丰富的数学计算和运动规划算法,我们可以优化机器人的路径规划,实现更高效和准确的运动。
四、C#在MES系统制作中的应用
在制造执行系统(MES)的开发中,C#语言也扮演着重要的角色。MES系统是一种为企业提供生产流程管理和监控的软件系统,用于提高生产效率和质量,发那科机器人的二次开发可以很好地与MES系统结合。
通过使用C#编写的代码,我们可以将发那科机器人的数据与MES系统进行数据交互。将机器人获取的点位信息、运行状态等数据传输给MES系统,实现对机器人的监控和调度。同时,MES系统也可以将生产任务传输给发那科机器人,实现生产流程的自动化和智能化。
总结:
在发那科机器人的二次开发中,C#语言具备了读取和写入数据的功能,可以轻松获取机器人的点位信息。同时,C#在制作MES系统中也发挥着重要的作用,将机器人数据与MES系统进行集成。C#语言的灵活性和可扩展性为发那科机器人二次开发和MES系统制作提供了强有力的支持,进一步推动了工业自动化的发展。
相关的代码,程序地址如下:http://coupd.cn/655026405018.html
















 782
782

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









