







系列文章目录
文章目录
前言
这门课是浙大高飞老师跟深蓝学院合作的免费公开课,想看课程的话去深蓝学院搜索即可,毕竟是免费的。同时高飞老师在b站也发布了免费的实物搭建教程,相辅相成。
深蓝学院链接:自主旋翼无人机导论述
b站实物教程链接:【完结】从0制作自主空中机器人 | 开源 | 浙江大学Fast-Lab
不过毕竟是两年前(2023年1月)的教程,主要的硬件选型(如机载电脑)可能已经更新换代有更好的选择,这方面需要读者自己去搜索了解一下。
第一章:导论
1、无人飞行器种类:
| 项目 | Value |
|---|---|
| 固定翼 | •长续航,大负载,自稳系统 需要跑道,可能失速,需要空气动力学设计 |
| 直升机 | •垂直起降 • 中等续航与负载• 复杂的机械设计,非自稳系统 |
| 多旋翼 | •垂直起降,简易的机械设计 ,难以大型化 ,较短的续航和较小的负载,非自稳系统 |
| 混合式无人机(旋翼+固定翼) | •垂直起降,长续航,大负载 。但 技术未发展成熟 |
| 扑翼/仿生无人机 | • 适合小型系统• 技术未发展成熟 |
2、自主无人机架构:
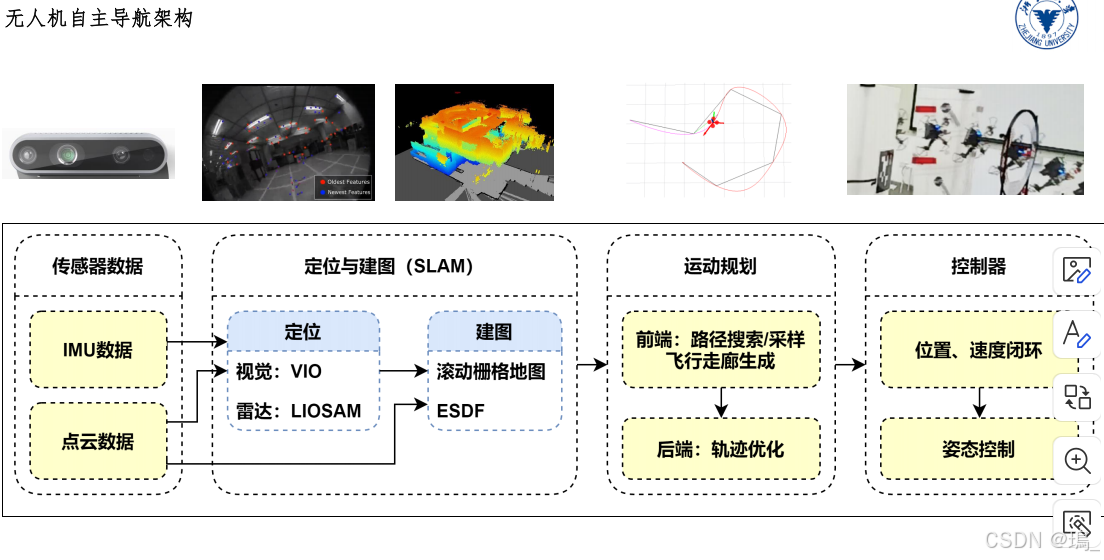
相关内容如:定位、建图、路径搜索、路径优化、控制算法等,都很复杂,需要自己线下学习了解。
一些经典工具或算法介绍如下,都是基石类知识,建议都去了解至少知道是怎么回事。
定位:
GPS
动作捕捉仪
视觉惯性里程计(VIO)
激光惯性里程计
建图:
点云地图
栅格地图
八叉树地图
欧氏距离场(ESDF)
路径搜索:
Dijkstra
Astar
RRT
人工势场法
路径优化:
Minimum-Snap
SE(3)轨迹优化
3、实验室的一些工作介绍
可以自己去了解,高老师实验室的成果基本都在github上开源了,难度较大,想学明白还是很难的。就算拿来用也需要很多基础知识。
第二章:软硬件架构
1、无人机硬件架构
(1)飞控:
飞控又称飞行控制器,用于根据输入指令解算电机推力。
也就是说你只需要输入上升多少、前进多少、转弯多少,姿态怎样之类的命令,而不需要考虑每个旋翼的电机转速应该多少才能达到对应状态,不然你就需要给出底层电机的转速才能完成飞行了,飞控就是帮我们解决了这个问题。
飞控内置了一些传感器来帮助主控芯片实现控制:
| 项目 | 作用 |
|---|---|
| IMU(Inertial Measurement Unit,惯性传导单元) | 通常6轴IMU可以报告三个基本线性运动(加速度)和三个基本角运动(角速度),也有9轴IMU可以额外测量当前的朝向。 |
| 气压计 | 测量气压来反映无人机的高度 |
| 磁罗盘 | 借助地球磁场来反映无人机的朝向 |
飞控会预留许多通信接口来便于接入设备或扩展:
| 项目 | 作用 |
|---|---|
| I2C通信(原名IIC,读作 i 方C,平方的方) | 一般两个接口,SDA 和 SCLK |
| UART通信 | 即串口,一般三个接口,RX、TX、GND,通信速度较慢 |
| CAN通信 | 一般两个接口,CAN_H 和 CAN_L,相比前两种,使用了大量的手段保证数据及时、准确的传输。 |
飞控发展至今有几个主要派系,有些时候可能兼容,很多时候不行:
| 项目 | 作用 |
|---|---|
| PX4 | 比较流行,开源社区,可玩性高 |
| APM | 资历比较老,代码结构没有PX4新,基本在与PX4互相借鉴进步 |
| DJI | 商业封闭飞控,只能使用不能修改 |
选型指标
| 项目 | 作用 |
|---|---|
| 飞控减震结构 | 避免飞行时的震动对姿态传感器造成过大干扰 |
| 恒温系统 | 避免IMU等芯片产生温飘,误差 |
(2.1)电调
电调(Electronic Speed Control,ESC),即电子调速器,用于控制无刷电机或其他类型电机的转速,飞控根据目标姿态输出电机转速,但电机只会转,并没有数控模块,因此就需要电调。
电调实际上就是电机的驱动模块,它接收控制信号,再根据信号控制输出的电流大小、相位,从而精确控制电机。
| 项目 | 作用 |
|---|---|
| 多合一电调 | 常用于空间紧凑的穿越机上 |
| 分体电调 | 大尺寸如航拍无人机常用 |
选电调时务必要注意与电机的适配,通常可以通过电机的力效表来估算电机正常运行下的电流,并确保电流低于电调的额定值。而且因为各种损耗和估算的不准确,选电调时要选承载电流更大的,留够余裕防止过载。
(2.2)电机
比较便宜的有空心杯电机,性能低容易坏,更常用的是无刷电机。
选型指标:
电机尺寸、适配的桨叶尺寸、KV值。
KV值
| 项目 | 作用 |
|---|---|
| KV值 | 电机的转速(空载)= KV值 * 电压 |
通常来说,工作电压越小、适配桨叶越小的电机,KV值越大。
主要还是根据实际条件选合适的KV值。
力效表
| 项目 | 作用 |
|---|---|
| 力效表 | 反映电机各种条件下的运行参数,将电机作为主要考虑对象,可以估算出无人机的工作电流、续航、最大加速度(即最大推力)等等。 |
怎么使用力效表的实例如下:
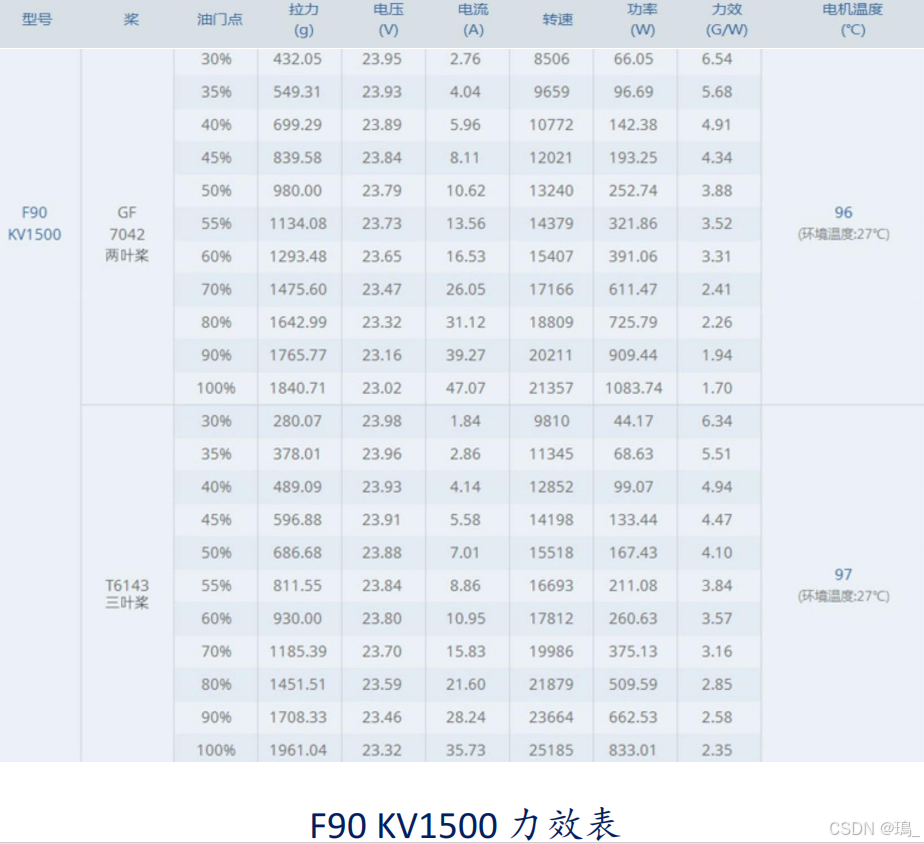
假设有四旋翼无人机自重2000g,那么想要悬停在空中一片桨叶(桨叶型号GF7032两叶桨)需要提供至少500g拉力。
在力效表找到500g拉力处,对应的油门是35%,每台电机对应的工作电压是23.93V,力效是5.68 g/W。
那么可以计算如下:
悬停功率:2000g(自重) / 5.68(力效,g/w) = 350W
悬停电流:350W(悬停功率) / 23.93V(悬停电压) = 15A
假设期待的悬停续航是半个小时,那么应购买的电池容量为:
电池容量:15A * 0.5h = 7500mAh
电调选型在力效表找到油门100%处,发现对应的工作电流是47.07A(每台电机),那么在选购电调时,必须确保其承载电流大于电机最大工作点处的电流,也就是此表中的47.07A,对此例选用60A的电调比较合适。
注意力效表都是在标准状态下测得,实际使用时难免有很多其他损耗,经常会打折扣。甚至会有无良厂家虚标的情况?
(3.1)电池:
选型指标:电压(电芯数)、放电倍率、容量
| 项目 | 作用 |
|---|---|
| 电压(电芯数) | 一般用几S描述,例如3S就是三电芯串联,对应12V电压。6S电芯对应24V。 |
| 放电倍率 | 最大电流 = 电压 * 放电倍率 |
| 容量 | 需要根据载重、续航综合选择。 |
(3.2)BB响
指示电池内电压,并且在低压时发出“BB响”提醒。一般设在3.3V,避免电池过放。
航模电池(锂电池)过放和过充都十分危险,严重时会引起自燃或者更甚,因此使用时需要注意,一定按照规范!
(4.1)遥控器:
选型指标:通道数、信号稳定度、手感。
(4.2)接收机:
接收遥控器的信号,选购时注意信号接收距离。
(4.3)GPS:
定位用,常用与定点模式。对于自主无人机一般不使用,而会使用视觉惯性里程计或者其他slam技术进行定位。
(5)机架:
选型指标:轴距、重量、扩展结构。
例如Q250机架 、F330机架等,其中数字指的就是轴距,单位是mm。
轴距应该根据需求选择,更大的轴距意味着更大的电机和桨叶。
(6)机载电脑:
内部安装操作系统(如linux类型的ubuntu),因此可以运行各种算法如识别算法、路径规划算法、导航算法、运行神经网络等等。
机载电脑选型指标:GPU、CPU、兼容性、重量体积。
举例如下:
| 项目 | 作用 |
|---|---|
| 英伟达出品的Jetson xavier NX | CPU是ARM架构,同时具有CPU和GPU,能运行神经网络,尺寸小。 |
| 大疆出品的 DJI Manifold2C | CPU是x86架构,没有GPU但cpu算力强,尺寸大,有点重。 |
| 树莓派 | 算力较弱,能用但难以运行大型算法 |
(7)传感器:
感知环境用。
| 项目 | 作用 |
|---|---|
| 双目深度相机 | 可以运行视觉slam算法构建地图同时定位,最常用的型号 Intel RealSense D435i。 |
| 激光雷达 | 同样运行slam构建地图定位,常用mid-360。 |
| 光流传感器 | 可以做简单定位 |
| 追踪相机 | 常用于复杂环境下定位 |
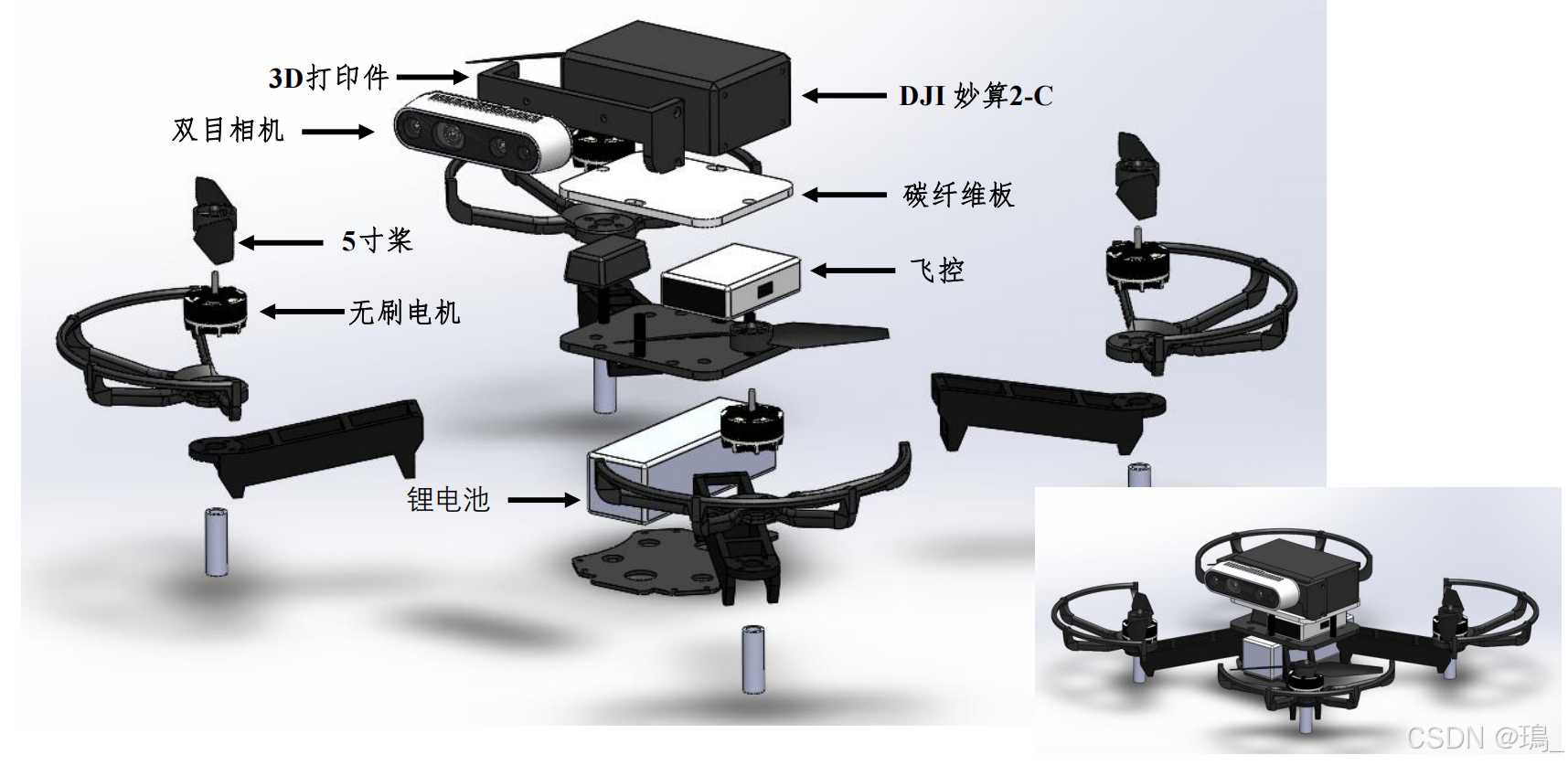
一台标准自主无人机的爆炸图:
2、无人机设计方法:
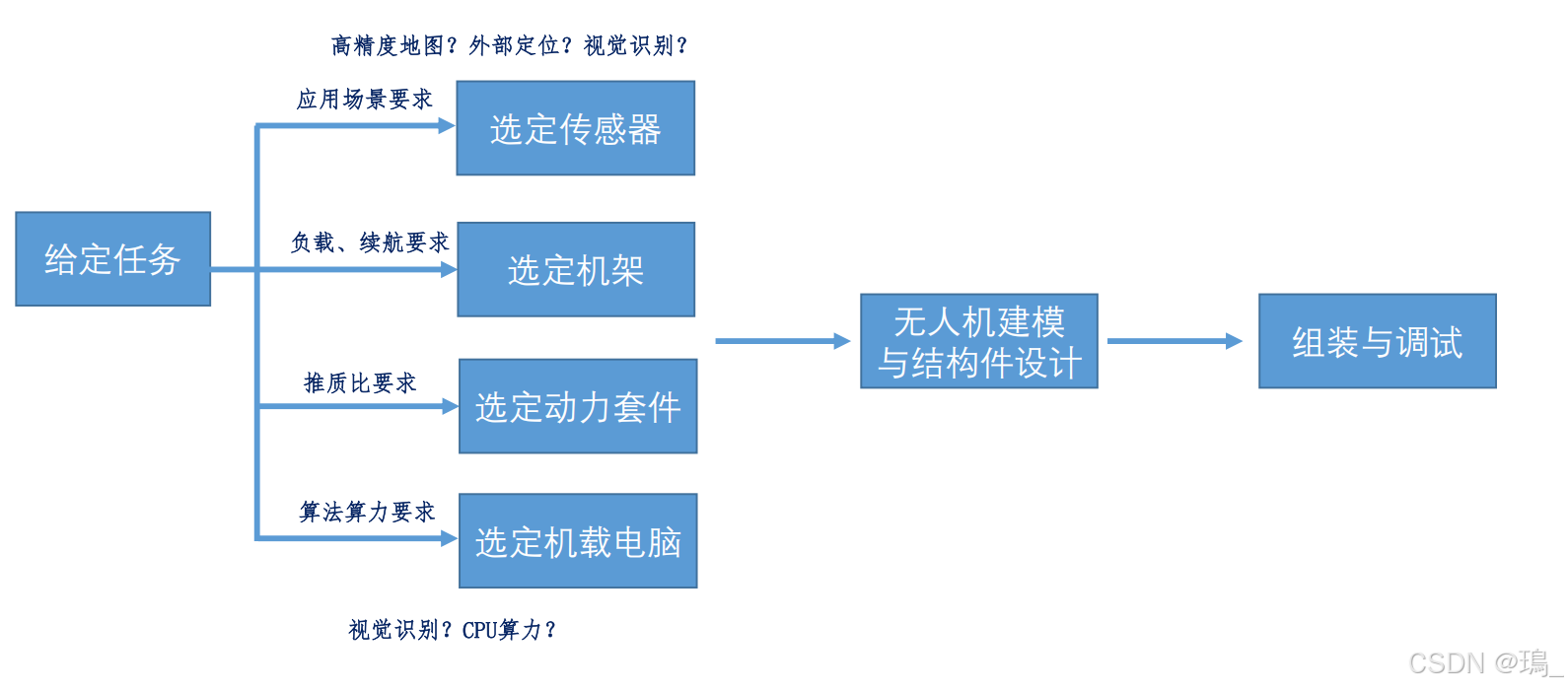
(1)选定传感器:
问: 高精度地图及定位?
选用激光雷达感知高精度建图。
问: 不需要高精地图,简单建图避障即可?
双目相机即可。
问: 外部定位?
有外部动捕定位直接用就可以,没有的话需要运行雷达 / 相机惯性里程计。
问: 需要视觉识别?
使用USB摄像头
(2)选定机架
可选择的情况下,尽量选择小机架来保证无人机的机动性。
(3)动力套件
如果有特殊动力、推质比、改装需求则另行选择,否则采用对应机架尺寸的经典搭配即可。
(4)机载电脑
问: 视觉识别要求,要能够运行深度神经网络算法?
选用jetson xavier NX 或类似。
问: 有比较高的CPU算力要求(如路径规划、避障、导航)?
选用 DJI妙算2-c 或类似。
问: 既需要视觉识别,又需要CPU算力?
可以考虑同时使用两台电脑靠网线串联通信,或换性能更强的机载电脑。
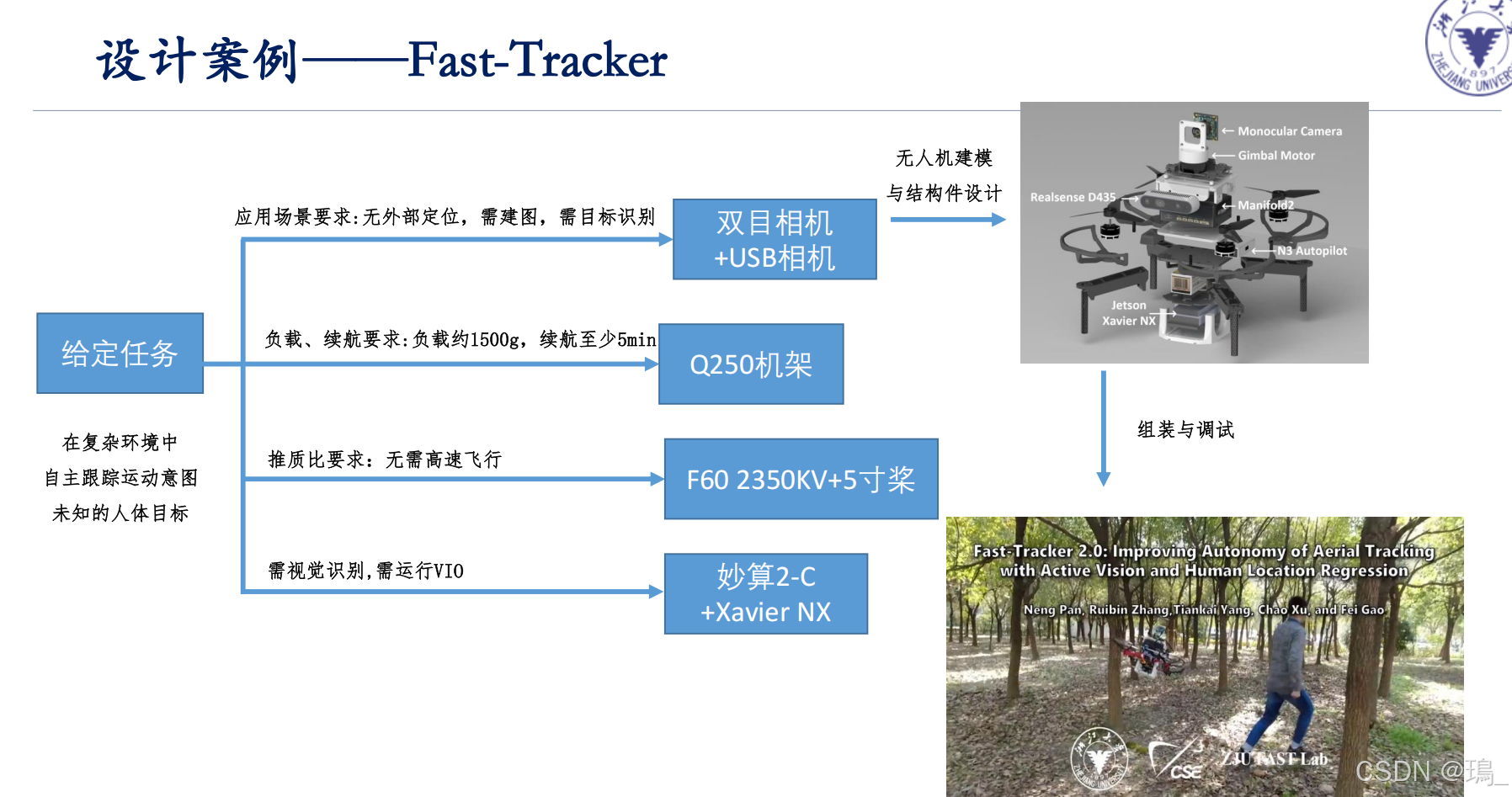
案例:

关键点:
(1)要求较高速飞行,故选择大KV值来提供更大的推质比。
(2)需要较大的CPU算力来运行VIO算法(视觉里程计),故选择大疆妙算2-C。
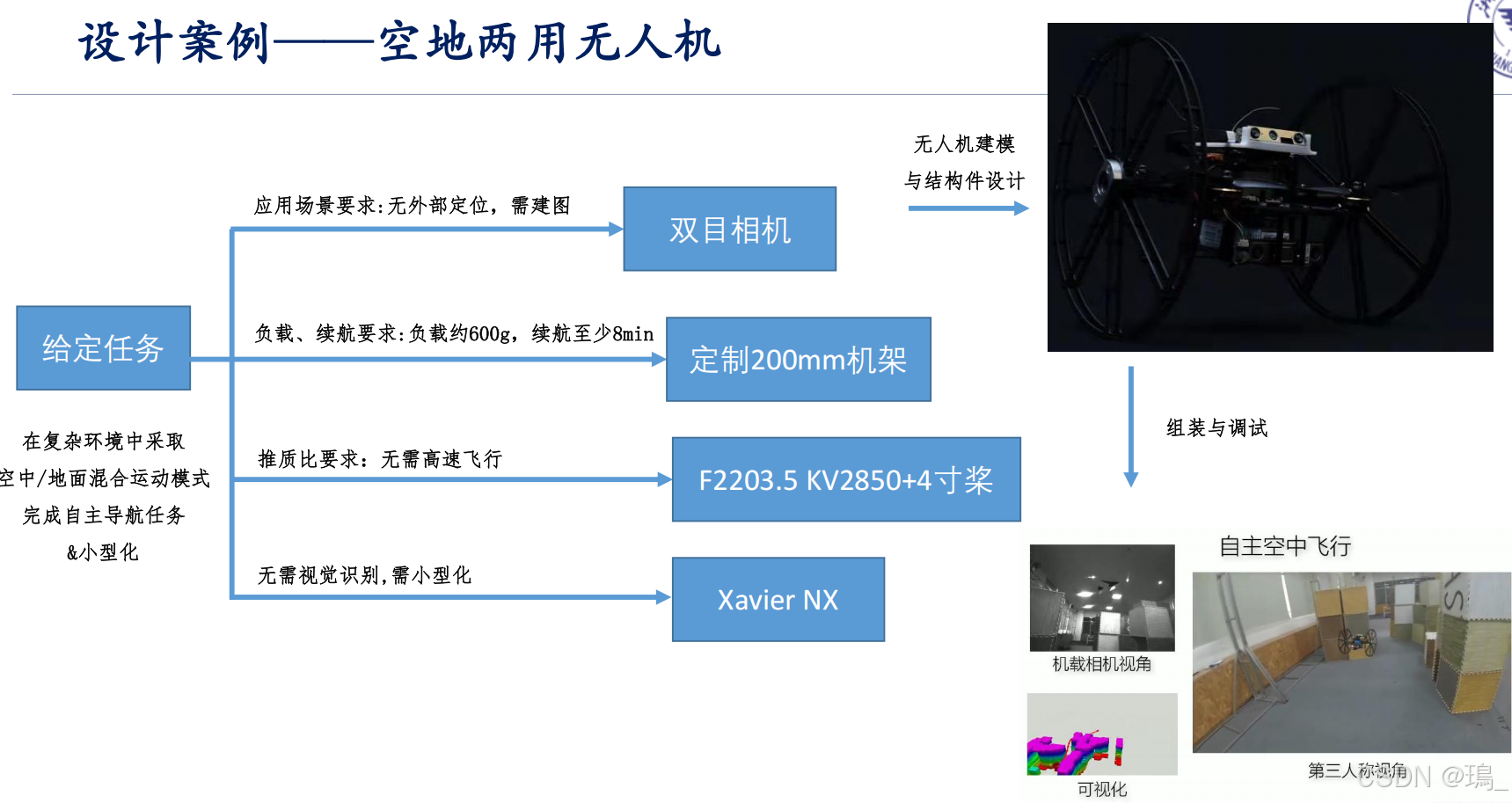
关键点:
(1)无需高速飞行,但有续航要求。故选择了更节能的小型电机配4寸桨。
(2)需要运行VIO算法,但由于载重和续航限制需要小型电脑,DJI妙算过大,于是选用jetson Xavier NX。为了让VIO算法流畅运行,或许需要在配置时自行对jetson Xavier NX进行一些修改…
关键点:
(1)深度神经网络进行人体识别就会几乎榨干jetson Xavier NX的算力,无力运行VIO和路径规划避障算法,因此加了妙算2-C。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









