







 本文详细介绍了两轮平衡车的工作原理,从单摆模型出发,分析了倒立摆模型的受力情况。在忽略空气阻力的条件下,讨论了回复力和阻尼力对平衡的影响。通过控制车轮加速度来实现平衡,强调了参数k1和k2在调节小车平衡中的关键作用。
本文详细介绍了两轮平衡车的工作原理,从单摆模型出发,分析了倒立摆模型的受力情况。在忽略空气阻力的条件下,讨论了回复力和阻尼力对平衡的影响。通过控制车轮加速度来实现平衡,强调了参数k1和k2在调节小车平衡中的关键作用。
一、模型建立
根据单摆模型,建立以下模型,如下图: 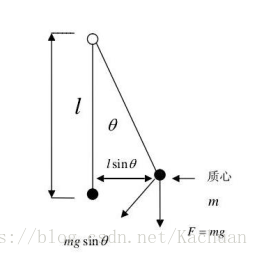
忽略空气阻力的情况下,当物体离开平衡位置后,物体会受到竖直向下的重力和沿着悬挂线向上方向的拉力的合力作用,使得物体在平衡位置做往返运动。该合力又称为恢复力,如下:

其中,悬线与竖直方向夹角为θ,与物体运动方向夹角为 π- θ,F方向与物体运动方向相切,指向平衡位置。
又由极限 ,可知,当θ较小时,有
,可知,当θ较小时,有

实际中,物体除了受到回复力F的作用外,还受到空气阻力F阻的作用,从而最终会静止在平衡位置。而运动中空气阻力的大小与物体运动速度大小成正比,该比例由阻尼系数k表示,而阻力方向与运动速度方向相反。此时物体在运动方向上所受合力如下:

因此,对于单摆模型,其保持平衡需耀具备以下条件:
- 受到与偏移方向相反的回复力的作用
- 受到与物体运动方向相反的阻尼力的作用
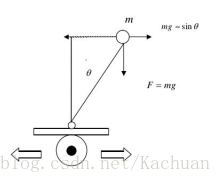
对于两轮平衡车,可以简化为倒立摆模型,如下:
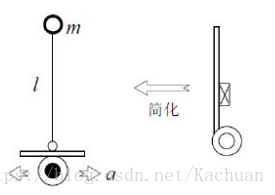
而对于倒立摆模型,其受力如下:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









