






前言
前面已经学习完了CAN控制器的基本原理以及通信机制,这次我们来具体学习一下它的寄存器配置以及上手实践一次,学习资料均来自正点原子
寄存器部分
主控制器寄存器CAN_MCR
这个寄存器用于负责CAN工作模式的配置(见第二篇),其起作用的位为第0位INRQ
软件对该位清零就可以使CAN从初始化模式进入正常工作模式
当CAN在接收端检测到连续的11个隐性位后CAN将完成同步,此时便可以开始正常的通信,这个时候硬件会自动将CAN_MSR寄存器(CAN主状态寄存器)中的INAK位置0
同样地,当软件对该位置1就可以使CAN进入初始化模式
一旦CAN上一个活动结束,CAN就会进入该模式,此时CAN_MSR中的INAK置1
一个正常的工作流程应该为:先将INRQ置1进入初始化模式,此时对各种寄存器进行配置,(例如通过配置CANBTR配置总线波特率),等到配置完成后将INRQ置0进入正常工作模式
位时序寄存器CAN_BTR
该寄存器用于设置分频、TBS1、TBS2、TSJW来控制波特率和配置CAN的测试模式
由上表不难看出,通过配置SILM&LBKM来配置不同的测试模式用于测试CAN的工作情况,剩下的位除了保留位外均是用于配置时序长度,注意在软件配置时要进行’+1‘操作
要注意的是位[0:9]用于配置分频器,这直接影响了最终的Tq
**标识符寄存器CAN(T/R)IxR
这个寄存器用于存放(待发送/接收)的报文ID、扩展ID、IDE位以及RTR位

作为发送端来说
寄存器用于配置不同邮箱内的报文信息,因此x的范围是1~3
作为接收端来说
寄存器用于配置不同FIFO内的报文信息,因此x的范围是1~2
数据长度和时间戳寄存器CAN(T/R)DTxR
该寄存器只需要配置DLC即可,控制的是帧的数据段的长度(0~8Byte)
高低位数据寄存器CAN(T/R)D(H/L)xR
低位寄存器就是用于存储低16位的数据,没什么好介绍的
下面重点看一下高字节数据寄存器
最值得留意的就是当CAN工作在时间戳模式下时DATA7和DATA6将不再代表数据而是代表时间戳
过滤器模式寄存器CAN_FMxR
这个寄存器很简单,通过配置不同位的数值来配置过滤器模式,每组过滤器严格对应自己的位,要注意的是不同型号的主控包含的寄存器组数量不同,例如F103ZET6是用不了FBM14组以上的寄存器的
过滤器位宽寄存器CAN_FSxR
这个在第二篇有提及,过滤器可以设置为16位和32位的数据
过滤器FIFO关联寄存器CAN_FFAxR

这个寄存器用于设定经过滤波器后的有效报文要去往的FIFO是FIFO0还是FIFO1
要注意的是该寄存器的配置也要在初始化模式下配置
过滤器激活寄存器CAN_FAxR
在前面也有提及,映射关系的不同决定了不同的滤波工作模式
搭建工程
这里我想提一个可能比较简单但是我个人理解了很久的一点:当我们在配置过滤器时如何取得扩展帧高16位的数据,教程给出的是>>13位,但以我的理解不应该是>>16位吗,后来翻看前面的笔记我才明白一个扩展帧最多才29位,并不是32位,因此只需要>>13位即可QAQ
现在我们来通过CUBEMX创建工程,首先配置时钟,拉满即可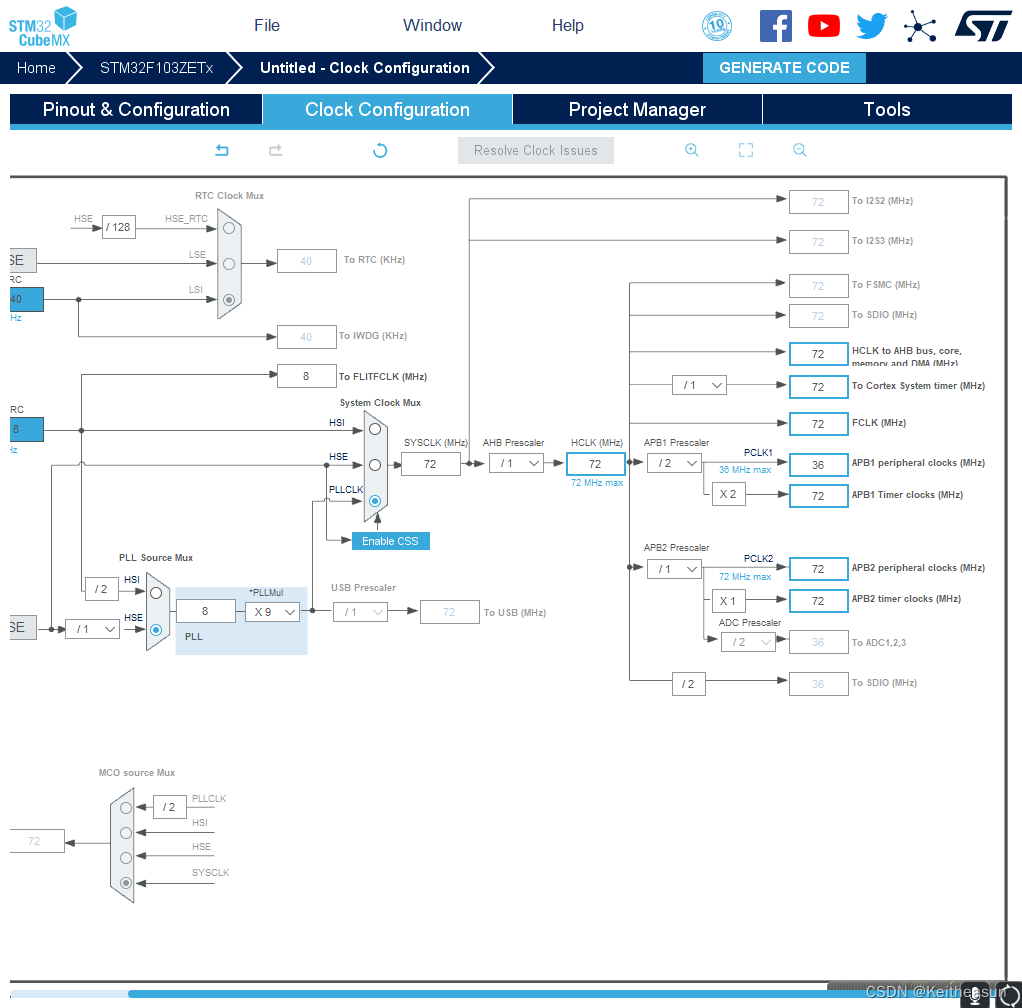
此时CAN的时钟为36M,接下来将CAN开启,配置波特率相关参数
其他不需要开启的功能全部DISABLE即可,然后就可以创建工程
代码部分
CAN.c
/**
****************************************************************************** * File Name : CAN.c * Description : This file provides code for the configuration * of the CAN instances. ****************************************************************************** * @attention * * <h2><center>© Copyright (c) 2022 STMicroelectronics. * All rights reserved.</center></h2> * * This software component is licensed by ST under BSD 3-Clause license, * the "License"; You may not use this file except in compliance with the * License. You may obtain a copy of the License at: * opensource.org/licenses/BSD-3-Clause * ****************************************************************************** */
/* Includes ------------------------------------------------------------------*/
#include "can.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
CAN_HandleTypeDef hcan;
/* CAN init function */
void MX_CAN_Init(void)
{
hcan.Instance = CAN1;
hcan.Init.Prescaler = 4;
hcan.Init.Mode = CAN_MODE_LOOPBACK; //进入回环模式测试
hcan.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan.Init.TimeSeg1 = CAN_BS1_9TQ;
hcan.Init.TimeSeg2 = CAN_BS2_8TQ;
hcan.Init.TimeTriggeredMode = DISABLE;
hcan.Init.AutoBusOff = DISABLE;
hcan.Init.AutoWakeUp = DISABLE;
hcan.Init.AutoRetransmission = DISABLE;
hcan.Init.ReceiveFifoLocked = DISABLE;
hcan.Init.TransmitFifoPriority = DISABLE;
if (HAL_CAN_Init(&hcan) != HAL_OK)
{
Error_Handler();
}
//过滤器的一些参数配置
CAN_FilterTypeDef canFilter_Config;
canFilter_Config.FilterMode = CAN_FILTERMODE_IDMASK; //屏蔽模式
canFilter_Config.FilterScale = CAN_FILTERSCALE_32BIT; //32位模式
//暂时不启动过滤操作
canFilter_Config.FilterIdHigh = 0;
canFilter_Config.FilterIdLow = 0;
canFilter_Config.FilterMaskIdHigh = 0;
canFilter_Config.FilterMaskIdLow = 0;
//配置对应的过滤器组以及FIFO组
canFilter_Config.FilterBank = 0;
canFilter_Config.FilterFIFOAssignment = CAN_FilterFIFO0;
//配置从过滤器组以及开启过滤器
canFilter_Config.FilterActivation = CAN_FILTER_ENABLE;
canFilter_Config.SlaveStartFilterBank = 14;
//过滤器组初始化以及CAN的开启
HAL_CAN_ConfigFilter(&hcan,&canFilter_Config);
HAL_CAN_Start(&hcan);
}
void HAL_CAN_MspInit(CAN_HandleTypeDef* canHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(canHandle->Instance==CAN1)
{
/* USER CODE BEGIN CAN1_MspInit 0 */
/* USER CODE END CAN1_MspInit 0 */ /* CAN1 clock enable */ __HAL_RCC_CAN1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**CAN GPIO Configuration
PA11 ------> CAN_RX PA12 ------> CAN_TX */ GPIO_InitStruct.Pin = GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN CAN1_MspInit 1 */
/* USER CODE END CAN1_MspInit 1 */ }
}
void HAL_CAN_MspDeInit(CAN_HandleTypeDef* canHandle)
{
if(canHandle->Instance==CAN1)
{
/* USER CODE BEGIN CAN1_MspDeInit 0 */
/* USER CODE END CAN1_MspDeInit 0 */ /* Peripheral clock disable */ __HAL_RCC_CAN1_CLK_DISABLE();
/**CAN GPIO Configuration
PA11 ------> CAN_RX PA12 ------> CAN_TX */ HAL_GPIO_DeInit(GPIOA, GPIO_PIN_11|GPIO_PIN_12);
/* USER CODE BEGIN CAN1_MspDeInit 1 */
/* USER CODE END CAN1_MspDeInit 1 */ }
}
/* USER CODE BEGIN 1 */
CAN_TxHeaderTypeDef g_can1_txheader;
CAN_RxHeaderTypeDef g_can1_rxheader;
//CAN数据的发送
void can_send_message(uint32_t id, uint8_t *buf, uint8_t len)
{
uint32_t tx_mail = CAN_TX_MAILBOX0; //邮箱0
g_can1_txheader.ExtId = id; //配置ID
g_can1_txheader.DLC = len; //配置长度
g_can1_txheader.IDE = CAN_ID_EXT; //配置为扩展帧
g_can1_txheader.RTR = CAN_RTR_DATA; //配置为数据帧
HAL_CAN_AddTxMessage(&hcan,&g_can1_txheader,buf,&tx_mail); //发送数据
while(HAL_CAN_GetTxMailboxesFreeLevel(&hcan) != 3); //邮箱未溢出
}
uint8_t can_receive_message(uint8_t *buf)
{
if(HAL_CAN_GetRxFifoFillLevel(&hcan,CAN_RX_FIFO0) == 0) //FIFO未存储数据
{
return 0;
}
HAL_CAN_GetRxMessage(&hcan,CAN_RX_FIFO0,&g_can1_rxheader,buf); //若FIFO有数据则接收
return g_can1_rxheader.DLC;
}
/* USER CODE END 1 */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
CAN.h
/**
****************************************************************************** * File Name : CAN.h * Description : This file provides code for the configuration * of the CAN instances. ****************************************************************************** * @attention * * <h2><center>© Copyright (c) 2022 STMicroelectronics. * All rights reserved.</center></h2> * * This software component is licensed by ST under BSD 3-Clause license, * the "License"; You may not use this file except in compliance with the * License. You may obtain a copy of the License at: * opensource.org/licenses/BSD-3-Clause * ****************************************************************************** *//* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __can_H
#define __can_H
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* USER CODE BEGIN Includes */
uint8_t can_receive_message(uint8_t *buf);
void can_send_message(uint32_t id, uint8_t *buf, uint8_t len);
/* USER CODE END Includes */
extern CAN_HandleTypeDef hcan;
/* USER CODE BEGIN Private defines */
/* USER CODE END Private defines */
void MX_CAN_Init(void);
/* USER CODE BEGIN Prototypes */
/* USER CODE END Prototypes */
#ifdef __cplusplus
}
#endif
#endif /*__ can_H */
/**
* @} */
/**
* @} */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
MAIN.c
/* USER CODE BEGIN Header */
/**
****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * @attention * * <h2><center>© Copyright (c) 2022 STMicroelectronics. * All rights reserved.</center></h2> * * This software component is licensed by ST under BSD 3-Clause license, * the "License"; You may not use this file except in compliance with the * License. You may obtain a copy of the License at: * opensource.org/licenses/BSD-3-Clause * ****************************************************************************** *//* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "can.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point. * @retval int */int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */ SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */ MX_GPIO_Init();
MX_CAN_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
uint8_t can_buf[8] = "hello"; //can要发送的数据信息
uint8_t rec_len = 0; //接收到的数据长度
uint8_t rec_buf[8]; //接收到的数据
/* USER CODE END 2 */
/* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */ can_send_message(0x12345678,can_buf,8); //发送数据
rec_len = can_receive_message(rec_buf); //接收数据
if(rec_len)
{
for(uint8_t i = 0;i < rec_len;i++)
{
HAL_UART_Transmit(&huart1,&rec_buf[i],8,10000); //通过串口显示到串口助手上
}
}
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration * @retval None */void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure. */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence. * @retval None */void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
验证部分

此时串口已经可以发送数据















 386
386











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









