






三相感应异步电机的参数辨识,大厂成熟的C代码,附赠仿真模型:
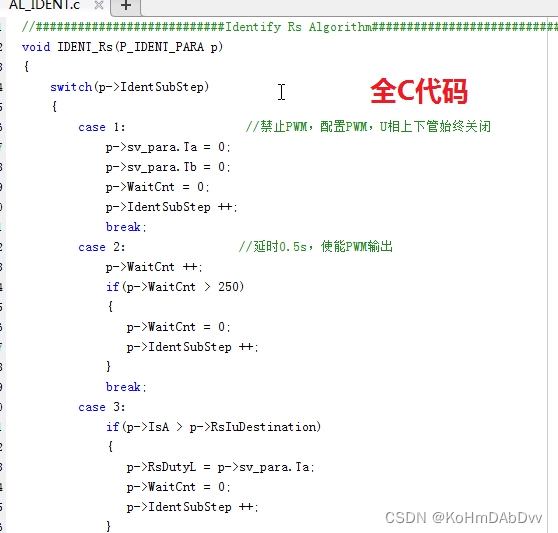
1. 第一步,辨识定子电阻;
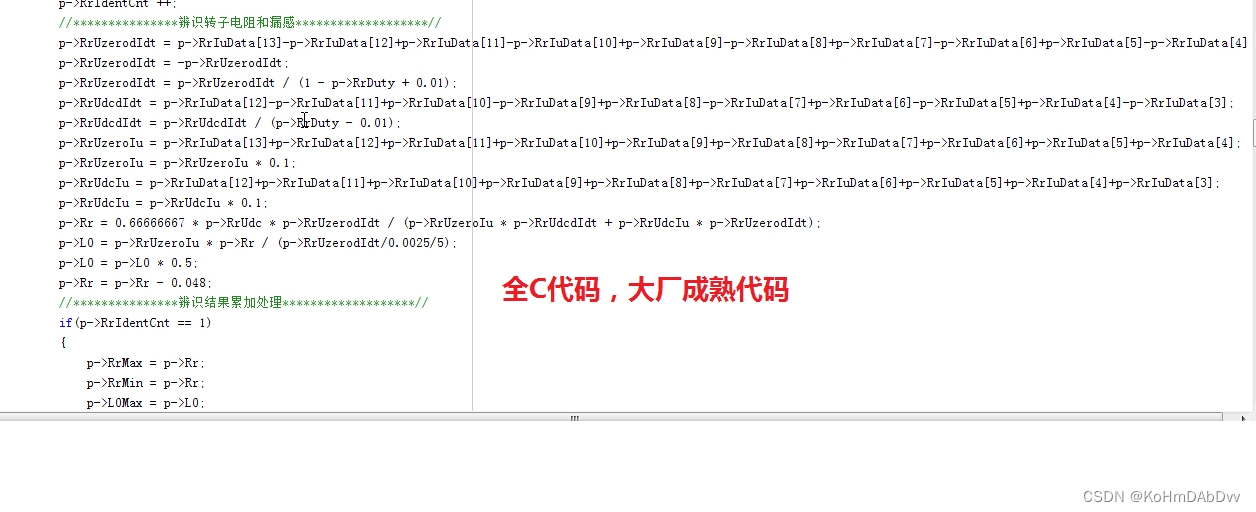
2. 第二步,辨识转子电阻和漏感;
3. 第三步,辨识互感并计算空载电流。
大厂成熟的代码,可以直接移植,本人已经成功移植到DSP28335芯片工程中,有详细的算法原理讲解。
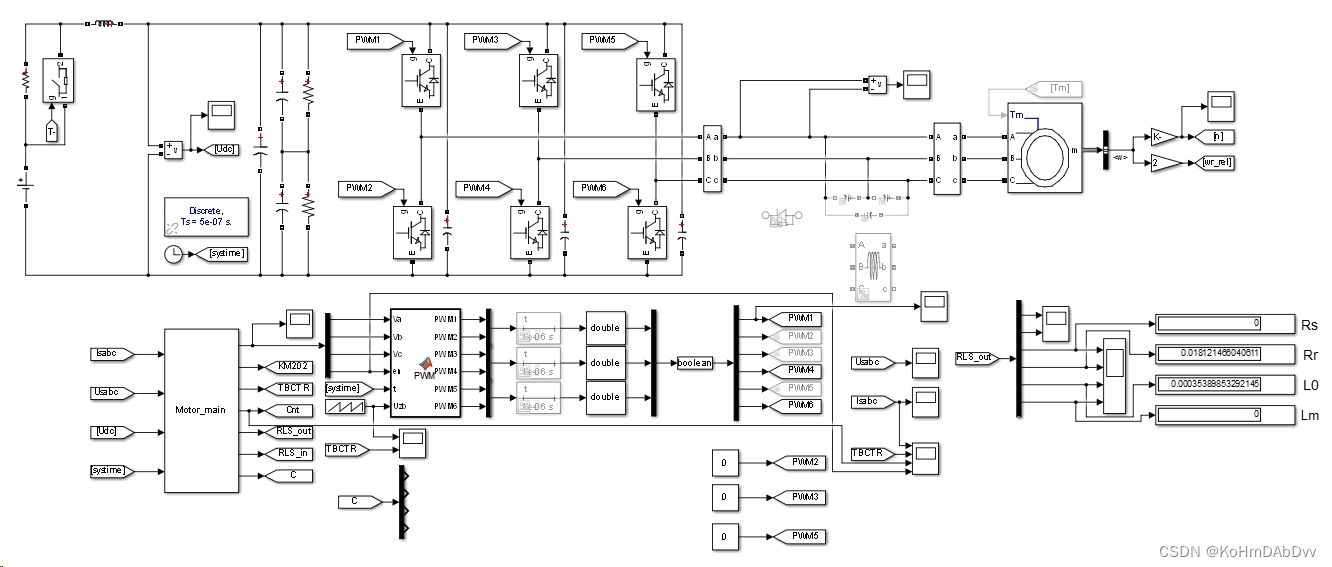
仿真模型采用S-Function即S函数调用C代码直接进行仿真,更贴近于硬件仿真。
三相感应异步电机的参数辨识是电机控制中的一个重要环节,它能够精确地获取电机的各项参数值,并为后续的控制算法提供准确的输入。在本文中,我们将介绍一种基于大厂成熟的C代码的参数辨识方法,并附赠一个仿真模型,用于验证参数辨识的准确性。
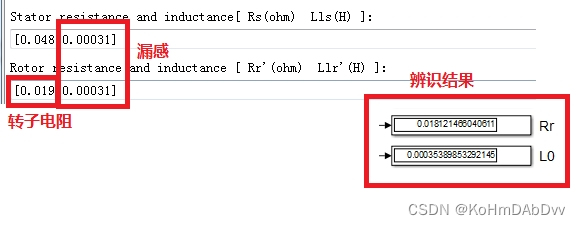
在进行三相感应异步电机参数辨识前,我们首先需要辨识定子电阻。定子电阻是电机的一个重要参数,它直接影响电机的电流响应和效率。我们可以通过测量电机的空载电流、额定电流和电压来计算定子电阻的值。在辨识定子电阻过程中,我们需要注意初始条件的设定,以及电动势的补偿等因素,确保测量结果的准确性。
接下来,我们将进行转子电阻和漏感的辨识。转子电阻和漏感也是电机参数中的关键因素,它们直接影响电机的转矩特性和效率。通过对电机的终端电流和转矩进行实时测量,我们可以使用适当的算法来辨识出转子电阻和漏感的值。在辨识过程中,我们需要注意转子磁链与电流的关系,以及转矩曲线的特征,确保辨识结果的准确性。
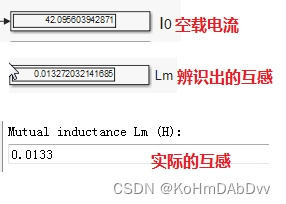
最后,我们将辨识电机的互感并计算空载电流。互感是电机的另一个重要参数,它直接影响电机的响应速度和控制精度。通过对电机终端电压和电流的测量,我们可以使用适当的算法来辨识出互感的值,并进一步计算出电机的空载电流。在辨识互感并计算空载电流的过程中,我们需要注意电机的终端电压的变化情况,以及电流与电压之间的相位差,确保辨识结果的准确性。
在本文中,我将介绍一种基于大厂成熟的C代码的参数辨识方法。这种方法已经在DSP28335芯片工程中成功移植,并得到了详细的算法原理讲解。这一成熟的C代码可以直接移植到其他工程中,为参数辨识提供便利和准确性。
此外,我们还附赠了一个仿真模型,采用S-Function即S函数调用C代码直接进行仿真。与常见的软件仿真相比,这种仿真模型更贴近于实际的硬件仿真,能够更准确地模拟电机的实际运行情况。通过使用这个仿真模型,我们可以验证参数辨识的准确性,并进一步优化算法的性能。
综上所述,本文以三相感应异步电机的参数辨识为主题,围绕辨识定子电阻、转子电阻和漏感、互感并计算空载电流这三个步骤展开了详细的阐述。同时,我们介绍了一种基于大厂成熟的C代码的参数辨识方法,并提供了一个仿真模型用于验证参数辨识的准确性。通过本文的内容,读者可以深入了解电机参数辨识的原理和方法,并在实际应用中取得良好的效果。
相关代码,程序地址:http://lanzouw.top/676858309107.html















 731
731











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









