






Cyber 复现:线性多智能体 动态事件触发 分布式控制
定向通信网络的线性多智能体系统的一致性问题,动态事件触发机制,布式控制协议,动态事件触发机制可以延长任意两个连续触发时刻之间的最小事件间隔时间,并且没有agent表现出Zeno行为
ID:2424785903526837
助力科研顺利毕业
Cyber 复现:线性多智能体 动态事件触发 分布式控制
引言
在现代社会中,线性多智能体系统在许多领域中扮演着重要的角色,如无人驾驶、机器人控制等。线性多智能体系统的一致性问题一直是研究的热点之一。本文将介绍一种基于动态事件触发机制的分布式控制协议,该机制能够有效延长最小事件间隔时间,并且排除了Zeno行为。
一、线性多智能体系统的一致性问题
线性多智能体系统是由多个智能体组成的系统,智能体之间通过定向通信网络进行通信和协作。在线性多智能体系统中,一致性问题是指智能体在无中心控制的情况下能否达到或维持某种一致的状态。该问题在实际应用中具有重要意义,因为在线性多智能体系统中,各个智能体的动作会相互影响。
二、动态事件触发机制
为了实现线性多智能体系统的一致性,我们提出了一种动态事件触发机制。该机制基于智能体之间的信息交流和状态更新,通过动态调整事件触发时刻来实现系统的一致性。具体来说,当系统的某个状态发生变化时,智能体之间会在特定时刻进行信息交流,并更新自身状态。而动态事件触发机制会根据系统当前的状态和之前的事件触发情况,计算出下一次事件触发时刻,从而延长任意两个连续触发时刻之间的最小事件间隔时间。
三、分布式控制协议
为了实现动态事件触发机制,我们设计了一种分布式控制协议。该协议利用定向通信网络进行信息交流,并通过智能体之间的协作来实现系统的一致性。在该协议中,每个智能体根据收到的信息和自身的状态进行状态更新,并根据动态事件触发机制计算出下一次事件触发时刻。同时,智能体之间还会通过定向通信网络进行信息交流和协作,以保持整个系统的一致性。
四、实验结果与分析
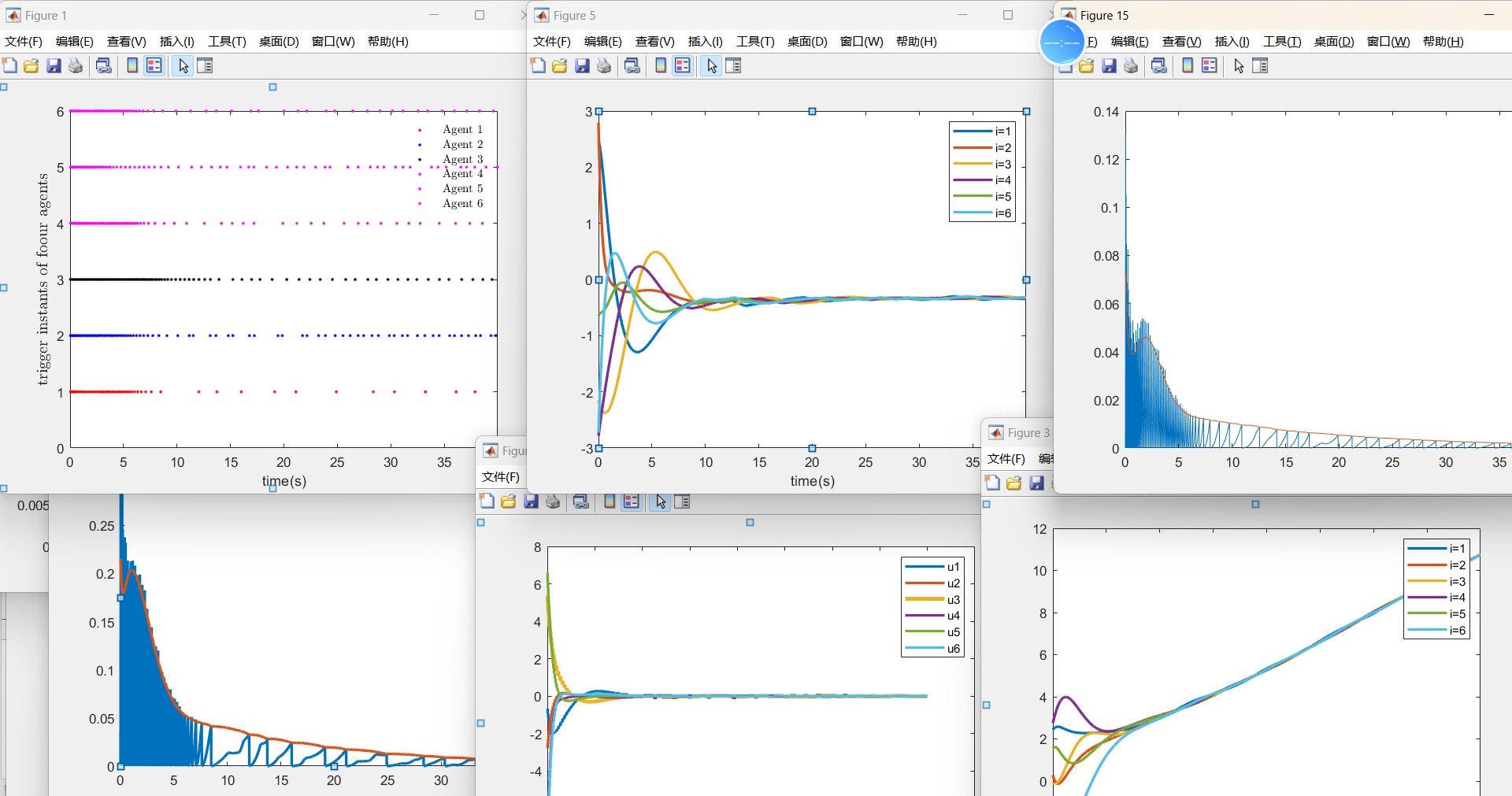
我们通过仿真实验证明了动态事件触发机制和分布式控制协议的有效性。实验结果表明,在动态事件触发机制的作用下,系统能够在延长最小事件间隔时间的同时,保持一致性。而分布式控制协议能够使智能体之间实现有效的信息交流和协作,从而达到系统的一致性。
五、结论
本文提出了一种基于动态事件触发机制的分布式控制协议,该协议能够解决线性多智能体系统的一致性问题。通过动态事件触发机制,系统能够延长最小事件间隔时间,并排除Zeno行为的出现。实验结果表明,该协议在实际应用中具有良好的效果。
六、展望
未来,我们将进一步研究该分布式控制协议在更复杂系统中的应用。同时,我们也将考虑其他方面的优化和改进,以提高系统的性能和效率。希望通过这些工作,能够为线性多智能体系统的控制和协作提供
以上相关代码,程序地址:http://fansik.cn/785903526837.html
















 1185
1185











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









