







背景
我们知道linux的进程的间通信的组件有管道,消息队列,socket, 信号量,共享内存等
但是我们如果自己实现一套进程间通信的机制的话,要怎么做?了解android 开发的可能会知道,android里面有个binder机制,简单来说,就是一个进程往binder里面写数据,另一个进程从binder里面读出数据。

原理

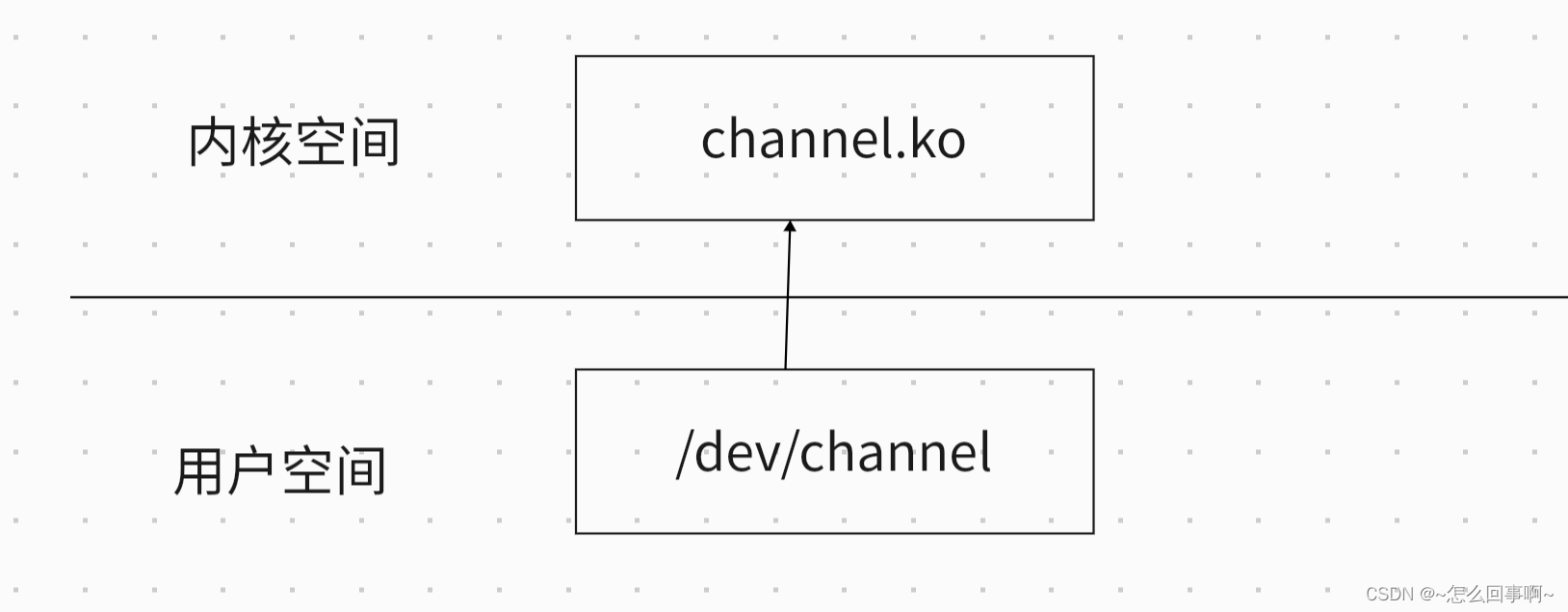
我们首先需要注册一个字符设备文件叫/dev/channel, 同时需要为这个设备编写驱动,此时某个进程A向设备文件写数据,同时如果该设备可读,我们就通知另一个进程B去读该进程。 我们怎么知道该设备是否可读可写呢?使用poll来管理,因为该设备驱动属于一个IO, 打开一个设备就有fd, 有了fd我们就可以使用poll来管理。
如:
发送方:

接收方:

代码:
#include <linux/module.h>
#include <linux/types.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/mm.h>
#include <linux/sched.h>
#include <linux/init.h>
#include <linux/cdev.h>
#include <asm/io.h>
#include <asm/uaccess.h>
#include <linux/slab.h>
#include <linux/poll.h>
#ifndef CHANNEL_MAJOR
#define CHANNEL_MAJOR 96
#endif
#ifndef CHANNEL_NR_DEVS
#define CHANNEL_NR_DEVS 2
#endif
#ifndef CHANNEL_SIZE
#define CHANNEL_SIZE 4096
#endif
#define ENABLE_POLL 1
struct channel {
char *data;
unsigned long size;
#if ENABLE_POLL
wait_queue_head_t inq;
#endif
};
static int channel_major = CHANNEL_MAJOR;
module_param(channel_major, int, S_IRUGO);
struct channel *channel_devp;
struct cdev cdev;
char have_data = 0;
int channel_open (struct inode *inode, struct file *filp) {
struct channel *channel;
int num = MINOR(inode->i_rdev); //设备读了多少次
if (num >= CHANNEL_NR_DEVS)
return -ENODEV;
channel = &channel_devp[num];
filp->private_data = channel;
return 0;
}
int channel_release (struct inode *inode, struct file *filp) {
return 0;
}
#if ENABLE_POLL
unsigned int channel_poll (struct file *filp, struct poll_table_struct *wait) {
struct channel *channel = filp->private_data;
unsigned int mask = 0;
poll_wait(filp, &channel->inq, wait); // poll 阻塞
if (have_data)
mask |= (POLLIN | POLLRDNORM);
return mask;
}
#endif
int channel_mmap (struct file *filp, struct vm_area_struct *vma) {
struct channel *channel = filp->private_data;
vma->vm_flags |= VM_IO;
vma->vm_flags |= (VM_DONTEXPAND | VM_DONTDUMP);
if (remap_pfn_range(vma, vma->vm_start, virt_to_phys(channel->data) >> PAGE_SHIFT,
vma->vm_end-vma->vm_start, vma->vm_page_prot)) {
return -EAGAIN;
}
return 0;
}
ssize_t channel_read (struct file *filp, char __user * buffer, size_t size, loff_t *ppos) {
unsigned long p = *ppos;
unsigned int count = size;
int ret = 0;
struct channel *channel = filp->private_data; // 读私有空间
if (p >= CHANNEL_SIZE) return 0;
if (count > CHANNEL_SIZE- p)
count = CHANNEL_SIZE- p;
#if ENABLE_POLL
while (!have_data) {
if (filp->f_flags & O_NONBLOCK) return -EAGAIN;
wait_event_interruptible(channel->inq, have_data);
}
#endif
if (copy_to_user(buffer, (void*)(channel->data + p), count)) { //拷贝到用户空间
ret = -EFAULT;
} else {
ret = strlen(buffer);
channel->size -= ret;
printk(KERN_INFO "read %d byte(s) from %ld\n", ret, p);
}
have_data = 0;
return ret;
}
ssize_t channel_write (struct file *filp , const char __user * buffer, size_t size, loff_t *ppos) {
int ret = 0;
unsigned long p = *ppos;
unsigned int count = size;
struct channel *channel = filp->private_data; // 写道文件的私有空间
if (p >= CHANNEL_SIZE) return 0;
if (count > CHANNEL_SIZE- p)
count = CHANNEL_SIZE- p;
if (copy_from_user(channel->data +p, buffer, count)) { // 从user -> kernel
return -EFAULT;
} else {
*ppos += count;
ret = count;
channel->size += count;
*(channel->data+p + count) = '\0';
printk(KERN_INFO "written %d byte(s) from %ld\n", count, p);
}
#if ENABLE_POLL
have_data = 1;
wake_up(&channel->inq);
#endif
return ret;
}
loff_t channel_llseek (struct file *filp, loff_t offset, int whence) { //偏移
loff_t newpos;
switch (whence)
{
case 0:
newpos = offset;
break;
case 1:
newpos = filp->f_pos + offset;
break;
case 2:
newpos = CHANNEL_SIZE - 1 + offset;
break;
default:
return -EINVAL;
}
if (newpos < 0 || newpos > CHANNEL_SIZE) return -EINVAL;
filp->f_pos = newpos;
return newpos;
}
static const struct file_operations channel_fops =
{
.owner = THIS_MODULE,
.llseek = channel_llseek,
.read = channel_read,
.write = channel_write,
.open = channel_open,
.release = channel_release,
.poll = channel_poll,
.mmap = channel_mmap,
};
static int channel_init(void) {
int reslut;
int i;
dev_t devno = MKDEV(channel_major, 0); // 创建一个主设备号为96,次设备号为0的设备
if (channel_major) {
reslut = register_chrdev_region(devno, CHANNEL_NR_DEVS, "channel"); // 注册设备
} else {
reslut = alloc_chrdev_region(&devno, 0, CHANNEL_NR_DEVS, "channel");
}
if (reslut < 0) return reslut;
cdev_init(&cdev, &channel_fops); //初始化字符设备
cdev.owner = THIS_MODULE;
cdev_add(&cdev, MKDEV(channel_major, 0), CHANNEL_NR_DEVS); //添加到字符设备中
channel_devp = kmalloc(CHANNEL_NR_DEVS *sizeof(struct channel), GFP_KERNEL); //为 我们的buffer 分配一块空间
if (!channel_devp) {
reslut = -ENOMEM;
goto fail_malloc;
}
memset(channel_devp, 0, sizeof(struct channel));
for (i = 0; i < CHANNEL_NR_DEVS; i++) {
channel_devp[i].size = CHANNEL_SIZE;
channel_devp[i].data = kmalloc(CHANNEL_SIZE, GFP_KERNEL);
memset(channel_devp[i].data, 0, CHANNEL_SIZE);
#if ENABLE_POLL
init_waitqueue_head(&(channel_devp[i].inq));
#endif
}
printk(KERN_INFO "ntychannel_init");
return 0;
fail_malloc:
unregister_chrdev_region(devno, 1);
return reslut;
}
static void channel_exit(void) {
printk(KERN_INFO "channel_exit");
cdev_del(&cdev);
int i = 0;
for (i = 0; i < CHANNEL_NR_DEVS; i++) {
kfree(channel_devp[i].data);
}
kfree(channel_devp);
unregister_chrdev_region(MKDEV(channel_major, 0), 2);
}
MODULE_AUTHOR("birate");
MODULE_LICENSE("GPL");
module_init(channel_init); // 设备初始化
module_exit(channel_exit); //设备退出
编写Makefile文件:
obj-m += channel.o
KERNELDIR ?= /lib/modules/$(shell uname -r)/build
all:
make -C $(KERNELDIR) M=$(PWD) modules
clean:
make -C $(KERNELDIR) M=$(PWD) clean
使用 make 命令。编译出我们需要的channel.ko文件。
使用 insmod channel.ko, 向kernel中插入 我们的module
使用mknod /dev/channel c 96 0, 创建一个/dev/channel 的字符设备,主设备号为96,次设备号为0;
测试程序:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/mman.h>
#include <errno.h>
#define BUFFER_LENGTH 128
int main () {
int fd = open("/dev/channel", O_RDWR);
if (fd < 0) {
printf("open failed: errno : %s\n", strerror(errno));
return -1;
}
char *buffer = (char *)malloc(BUFFER_LENGTH);
memset(buffer, 0, BUFFER_LENGTH);
char *start = mmap(NULL, BUFFER_LENGTH, PROT_READ | PROT_WRITE, MAP_SHARED, fd, 0);
fd_set rds;
FD_ZERO(&rds);
FD_SET(fd, &rds);
while(1) {
int ret = select(fd+1, &rds, NULL, NULL, NULL);
if (ret < 0) {
printf("select error\n");
exit(1);
}
if (FD_ISSET(fd, &rds)) {
#if 0
strcpy(buffer, start);
printf("channel: %s\n", buffer);
#else
read(fd, buffer, BUFFER_LENGTH);
printf("channel: %s\n", buffer);
#endif
}
}
munmap(start, BUFFER_LENGTH);
free(buffer);
close(fd);
return 0;
}
gcc -o channel_app channel_app.c , 编译出可执行文件,在一个进程中执行channel_app, 另一个进程使用echo " " > /dev/channel 去向设备文件中写就可以
系统调用 system_call
用户空间的 :
static const struct file_operations channel_fops =
{
.owner = THIS_MODULE,
.llseek = channel_llseek,
.read = channel_read,
.write = channel_write,
.open = channel_open,
.release = channel_release,
.poll = channel_poll,
.mmap = channel_mmap,
};
read,write等等是如何调用到内核空间的呢?
Oldlinux.org -- Linux plinux - Early Linux Kernel Analysis and Comments
linux老版本下载:Index of /Linux.old/
代码以0.11版本为例
系统调用是一个软中断,中断号是0x80,它是上层应用程序与Linux系统内核进行交互通信的唯一接口。
如:tools\build.c
调用open :
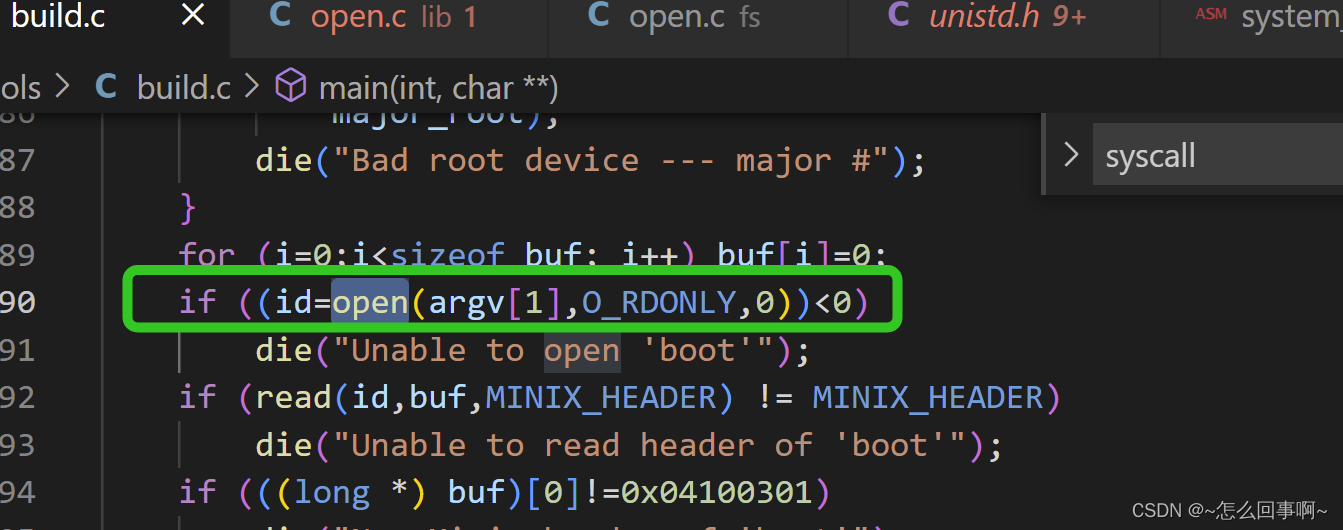
open的源码路径lib\open.c
/*
* linux/lib/open.c
*
* (C) 1991 Linus Torvalds
*/
#define __LIBRARY__
#include <unistd.h>
#include <stdarg.h>
int open(const char * filename, int flag, ...)
{
register int res;
va_list arg;
va_start(arg,flag);
__asm__("int $0x80"
:"=a" (res)
:"0" (__NR_open),"b" (filename),"c" (flag),
"d" (va_arg(arg,int)));
if (res>=0)
return res;
errno = -res;
return -1;
}
在汇编语言中调用0x80 ....进入系统调用
在include\unistd.h中定义了
#define __NR_setup 0 /* used only by init, to get system going */
#define __NR_exit 1
#define __NR_fork 2
#define __NR_read 3
#define __NR_write 4
#define __NR_open 5 // open是5
......
_syscall0(type,name) 其中 0 表示参数个数,type 表示返回值name表示函数名称
#define _syscall0(type,name) \
type name(void) \
{ \
long __res; \
__asm__ volatile ("int $0x80" \
: "=a" (__res) \
: "0" (__NR_##name)); \
if (__res >= 0) \
return (type) __res; \
errno = -__res; \
return -1; \
}
#define _syscall1(type,name,atype,a) \
type name(atype a) \
{ \
long __res; \
__asm__ volatile ("int $0x80" \
: "=a" (__res) \
: "0" (__NR_##name),"b" ((long)(a))); \
if (__res >= 0) \
return (type) __res; \
errno = -__res; \
return -1; \
}
#define _syscall2(type,name,atype,a,btype,b) \
type name(atype a,btype b) \
{ \
long __res; \
__asm__ volatile ("int $0x80" \
: "=a" (__res) \
: "0" (__NR_##name),"b" ((long)(a)),"c" ((long)(b))); \
if (__res >= 0) \
return (type) __res; \
errno = -__res; \
return -1; \
}
#define _syscall3(type,name,atype,a,btype,b,ctype,c) \
type name(atype a,btype b,ctype c) \
{ \
long __res; \
__asm__ volatile ("int $0x80" \
: "=a" (__res) \
: "0" (__NR_##name),"b" ((long)(a)),"c" ((long)(b)),"d" ((long)(c))); \
if (__res>=0) \
return (type) __res; \
errno=-__res; \
return -1; \
}
kernel\system_call.s
_system_call:
cmpl $nr_system_calls-1,%eax
ja bad_sys_call
push %ds
push %es
push %fs
pushl %edx
pushl %ecx # push %ebx,%ecx,%edx as parameters
pushl %ebx # to the system call
movl $0x10,%edx # set up ds,es to kernel space
mov %dx,%ds
mov %dx,%es
movl $0x17,%edx # fs points to local data space
mov %dx,%fs
call _sys_call_table(,%eax,4)
pushl %eax
movl _current,%eax
cmpl $0,state(%eax) # state
jne reschedule
cmpl $0,counter(%eax) # counter
je reschedule调用了系统调用表 call _sys_call_table(,%eax,4),%eax表示下标
include\linux\sys.h
fn_ptr sys_call_table[] = { sys_setup, sys_exit, sys_fork, sys_read,
sys_write, sys_open, sys_close, sys_waitpid, sys_creat, sys_link,
sys_unlink, sys_execve, sys_chdir, sys_time, sys_mknod, sys_chmod,
sys_chown, sys_break, sys_stat, sys_lseek, sys_getpid, sys_mount,
sys_umount, sys_setuid, sys_getuid, sys_stime, sys_ptrace, sys_alarm,
sys_fstat, sys_pause, sys_utime, sys_stty, sys_gtty, sys_access,
sys_nice, sys_ftime, sys_sync, sys_kill, sys_rename, sys_mkdir,
sys_rmdir, sys_dup, sys_pipe, sys_times, sys_prof, sys_brk, sys_setgid,
sys_getgid, sys_signal, sys_geteuid, sys_getegid, sys_acct, sys_phys,
sys_lock, sys_ioctl, sys_fcntl, sys_mpx, sys_setpgid, sys_ulimit,
sys_uname, sys_umask, sys_chroot, sys_ustat, sys_dup2, sys_getppid,
sys_getpgrp, sys_setsid, sys_sigaction, sys_sgetmask, sys_ssetmask,
sys_setreuid,sys_setregid };
可以看出系统调用表示一个函数数组,在include\unistd.h 定义了#define __NR_open 5,这里对应函数数组的下标5 :sys_open,调用内核函数:
fs\open.c
int sys_open(const char * filename,int flag,int mode)
{
struct m_inode * inode;
struct file * f;
int i,fd;
mode &= 0777 & ~current->umask;
for(fd=0 ; fd<NR_OPEN ; fd++)
if (!current->filp[fd])
break;
if (fd>=NR_OPEN)
return -EINVAL;
current->close_on_exec &= ~(1<<fd);
f=0+file_table;
for (i=0 ; i<NR_FILE ; i++,f++)
if (!f->f_count) break;
if (i>=NR_FILE)
return -EINVAL;
(current->filp[fd]=f)->f_count++;
if ((i=open_namei(filename,flag,mode,&inode))<0) {
current->filp[fd]=NULL;
f->f_count=0;
return i;
}
/* ttys are somewhat special (ttyxx major==4, tty major==5) */
if (S_ISCHR(inode->i_mode))
if (MAJOR(inode->i_zone[0])==4) {
if (current->leader && current->tty<0) {
current->tty = MINOR(inode->i_zone[0]);
tty_table[current->tty].pgrp = current->pgrp;
}
} else if (MAJOR(inode->i_zone[0])==5)
if (current->tty<0) {
iput(inode);
current->filp[fd]=NULL;
f->f_count=0;
return -EPERM;
}
/* Likewise with block-devices: check for floppy_change */
if (S_ISBLK(inode->i_mode))
check_disk_change(inode->i_zone[0]);
f->f_mode = inode->i_mode;
f->f_flags = flag;
f->f_count = 1;
f->f_inode = inode;
f->f_pos = 0;
return (fd);
}
那么 :
static const struct file_operations channel_fops =
{
.owner = THIS_MODULE,
.llseek = channel_llseek,
.read = channel_read,
.write = channel_write,
.open = channel_open,
.release = channel_release,
.poll = channel_poll,
.mmap = channel_mmap,
};
int channel_open (struct inode *inode, struct file *filp)
inode:文件具体数据 file:路径属性
是通过系统调用的
int sys_open(const char * filename,int flag,int mode) 完成的
主次设备号
/dev目录下执行ls -l
设备文件项的最后修改日期前的用逗号分割的两个数,对设备文件来说就是相应的主设备号和次设备号。
第一个字符c表示字符设备,b表示块设备
主设备号标识设备对应的驱动程序,次设备号由内核使用,用于正确确定设备文件所指的设备。依赖于驱动程序的编写方式,我们可以通过次设备号获得一个指向内核设备的直接指针,也可将次设备号当作设备本地数组的索引
在代码中:
static int channel_init(void) {
int reslut;
int i;
dev_t devno = MKDEV(channel_major, 0); // 创建一个主设备号为96,次设备号为0的设备
if (channel_major) {
reslut = register_chrdev_region(devno, CHANNEL_NR_DEVS, "channel"); // 注册设备
} else {
reslut = alloc_chrdev_region(&devno, 0, CHANNEL_NR_DEVS, "channel");
}
if (reslut < 0) return reslut;
cdev_init(&cdev, &channel_fops); //初始化字符设备
cdev.owner = THIS_MODULE;
cdev_add(&cdev, MKDEV(channel_major, 0), CHANNEL_NR_DEVS); //添加到字符设备中
channel_devp = kmalloc(CHANNEL_NR_DEVS *sizeof(struct channel), GFP_KERNEL); //为 我们的buffer 分配一块空间
if (!channel_devp) {
reslut = -ENOMEM;
goto fail_malloc;
}
memset(channel_devp, 0, sizeof(struct channel));
for (i = 0; i < CHANNEL_NR_DEVS; i++) {
channel_devp[i].size = CHANNEL_SIZE;
channel_devp[i].data = kmalloc(CHANNEL_SIZE, GFP_KERNEL);
memset(channel_devp[i].data, 0, CHANNEL_SIZE);
#if ENABLE_POLL
init_waitqueue_head(&(channel_devp[i].inq));
#endif
}
printk(KERN_INFO "ntychannel_init");
return 0;
fail_malloc:
unregister_chrdev_region(devno, 1);
return reslut;
}
在调用过:
sudo insmod channel.ko
sudo mknod /dev/channel c 96 0
cd /dev
ls -l | grep channel

可以看到注册的设备
sudo insmod channel.ko 实质是执行channel_init 函数
1 向内核申请注册一个设备:主次设备号 register_chrdev_region
2 初始化一个字符设备 cdev_init
3 加入到内核 cdev_add
4 初始化private_date
open
将file 和private_date关联起来
int channel_open (struct inode *inode, struct file *filp) {
struct channel *channel;
int num = MINOR(inode->i_rdev); //设备读了多少次
if (num >= CHANNEL_NR_DEVS)
return -ENODEV;
channel = &channel_devp[num];
filp->private_data = channel;
return 0;
}rmmod与模块退出
static void channel_exit(void) {
printk(KERN_INFO "channel_exit");
cdev_del(&cdev);
int i = 0;
for (i = 0; i < CHANNEL_NR_DEVS; i++) {
kfree(channel_devp[i].data);
}
kfree(channel_devp);
unregister_chrdev_region(MKDEV(channel_major, 0), 2);
}
write
通过:
root@ok-VirtualBox:/home/ok/channel# echo "111111111" > /dev/channel
查看日志:dmesg
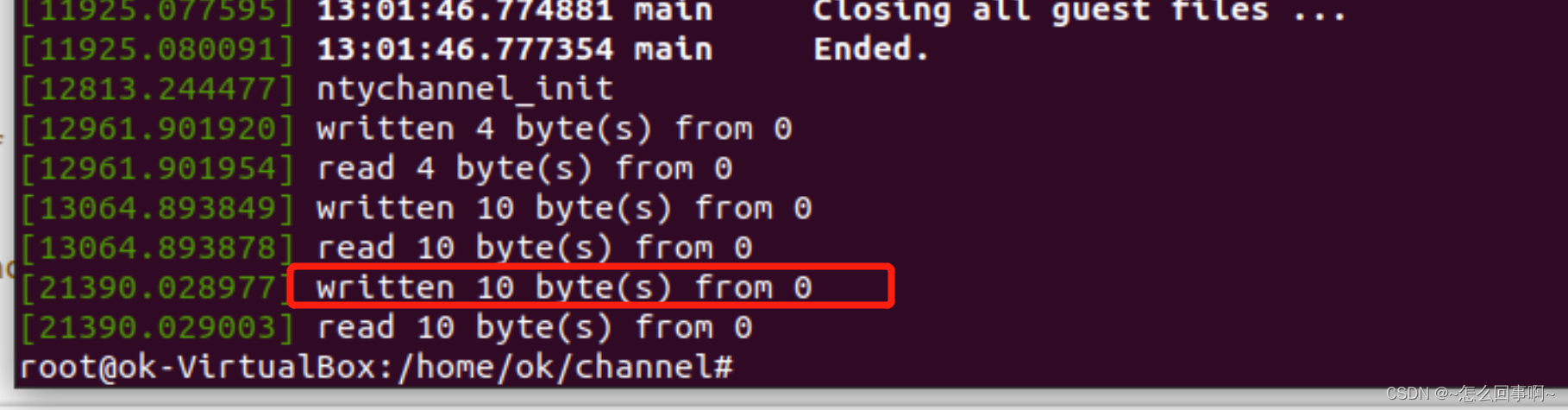
可以看到写入数据的日志
从用户空间的buffer ->copy to -> channel.date
//filp 文件属性
//buffer 用户写入数据buffer 如:123\0
//size 数据大小
//ppos 偏移量
ssize_t channel_write (struct file *filp , const char __user * buffer, size_t size, loff_t *ppos) {
int ret = 0;
unsigned long p = *ppos;
unsigned int count = size;
struct channel *channel = filp->private_data; // 写到文件的私有空间
if (p >= CHANNEL_SIZE) return 0;
//判断容量是否可以放下所有Buffer数据,防止数组越界
if (count > CHANNEL_SIZE- p)
count = CHANNEL_SIZE- p;
//从用户空间的数据 copy to 内核空间, 返回0表示成功 ,执行else
if (copy_from_user(channel->data +p, buffer, count)) { // 从user -> kernel
return -EFAULT;
} else {
//修改相关标志位
*ppos += count;
ret = count;
channel->size += count;
*(channel->data+p + count) = '\0';
printk(KERN_INFO "written %d byte(s) from %ld\n", count, p);
}
#if ENABLE_POLL
have_data = 1;
wake_up(&channel->inq);
#endif
return ret;
}1 检查参数
2 拷贝数据
3 上下文参数调整
read
ssize_t channel_read (struct file *filp, char __user * buffer, size_t size, loff_t *ppos) {
unsigned long p = *ppos;
unsigned int count = size;
int ret = 0;
struct channel *channel = filp->private_data; // 读私有空间
if (p >= CHANNEL_SIZE) return 0;
if (count > CHANNEL_SIZE- p)
count = CHANNEL_SIZE- p;
#if ENABLE_POLL
while (!have_data) {
if (filp->f_flags & O_NONBLOCK) return -EAGAIN;
wait_event_interruptible(channel->inq, have_data);
}
#endif
if (copy_to_user(buffer, (void*)(channel->data + p), count)) { //拷贝到用户空间
ret = -EFAULT;
} else {
ret = strlen(buffer);
channel->size -= ret;
printk(KERN_INFO "read %d byte(s) from %ld\n", ret, p);
}
have_data = 0;
return ret;
}poll
在应用层使用select 时,内核层会调用poll
#if ENABLE_POLL
unsigned int channel_poll (struct file *filp, struct poll_table_struct *wait) {
struct channel *channel = filp->private_data;
unsigned int mask = 0;
poll_wait(filp, &channel->inq, wait); // poll 阻塞
if (have_data)
mask |= (POLLIN | POLLRDNORM);
return mask;
}
#endif














 381
381











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









