






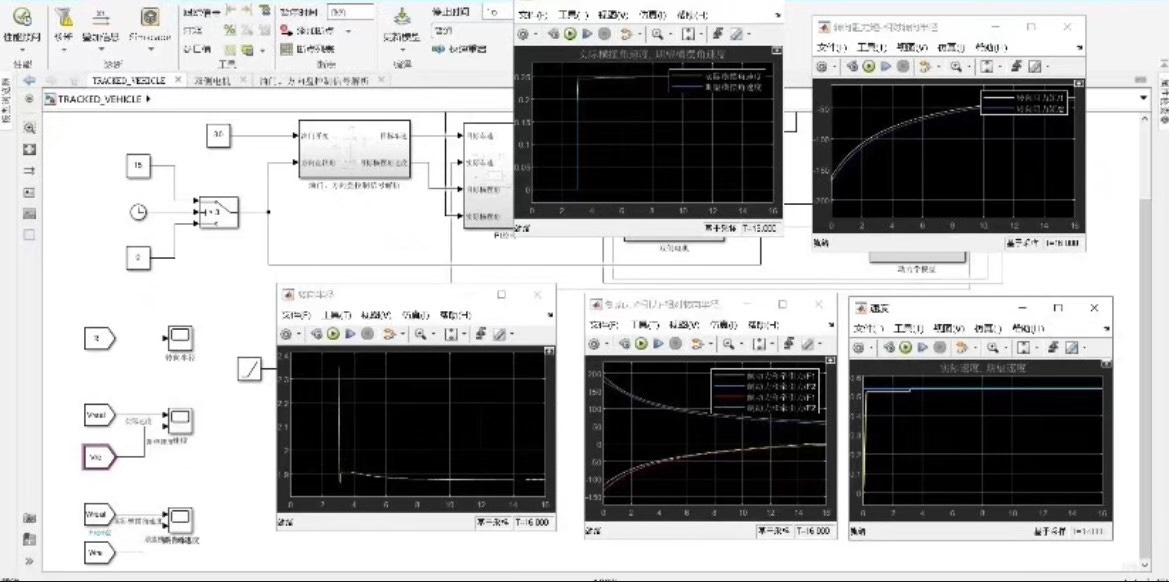
matlab/simulink建模:双侧独立电驱动车辆转向控制
履带车考虑滑转滑移的转向控制模型,包含双侧独立电驱动履带车动力学模型,车速和横摆角速度控制器(基于pi和SMC两种控制算法对比),作业工具模型等。
参考文献
:双侧独立电驱动履带车辆转向控制研究(哈工大)
大功率履带拖拉机耕耘机组稳定性研究(安徽农大)
ID:67242750478820129
果果的小店
Matlab Simulink建模: 双侧独立电驱动车辆转向控制
摘要
本文以履带车辆为研究对象,考虑滑转滑移的转向控制模型。该模型包括双侧独立电驱动履带车动力学模型、车速和横摆角速度控制器(基于PI和SMC两种控制算法对比)以及作业工具模型等。通过对该模型的建立和仿真,我们可以进一步研究和优化履带车辆的转向性能。
-
引言
履带车辆是一种特殊的车辆类型,常用于农业、工程和军事领域。在实际应用中,履带车辆的转向控制对于其性能和稳定性至关重要。因此,研究履带车辆的转向控制模型具有重要的理论和实际意义。 -
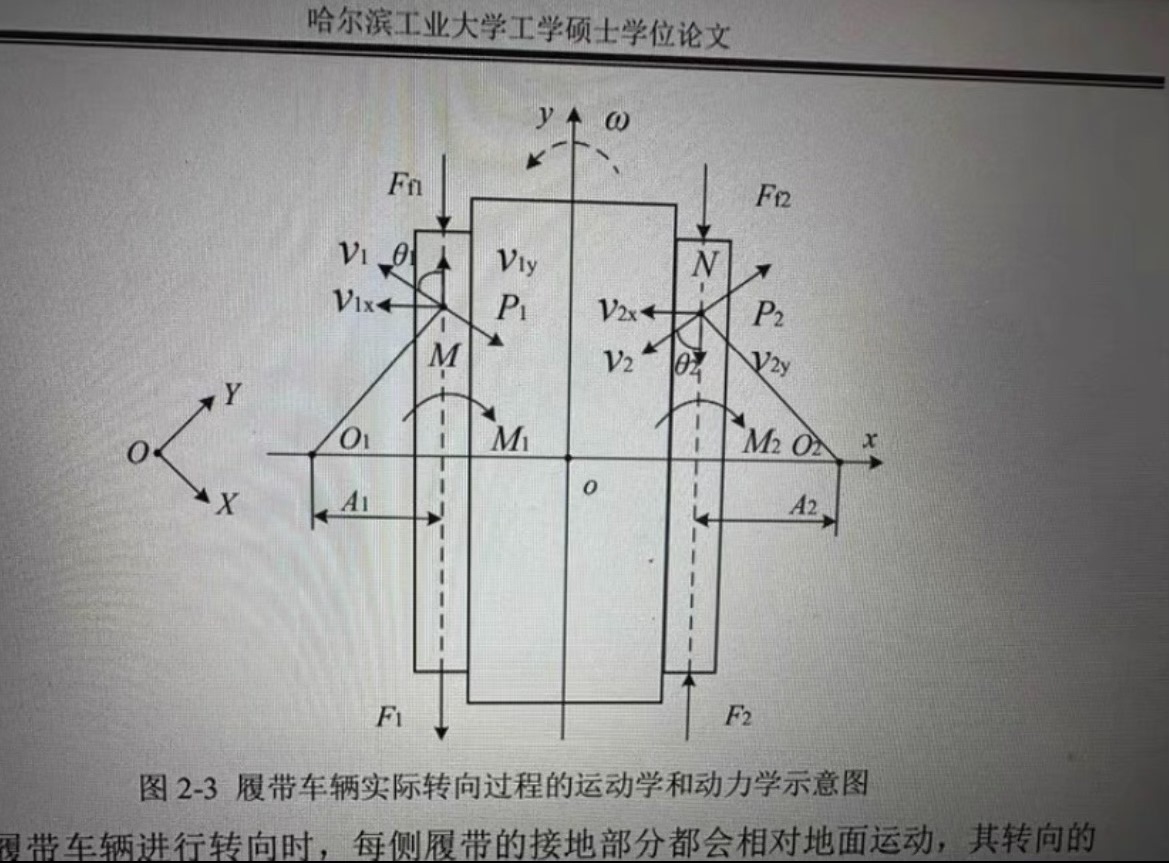
双侧独立电驱动履带车动力学模型
双侧独立电驱动履带车动力学模型是研究履带车辆转向控制的基础。该模型考虑了履带车辆的滑转滑移现象,通过建立履带车辆的动力学方程描述车辆的运动行为。其中,轮胎的滑转滑移是影响车辆转向性能的关键因素之一。在本文中,我们将重点研究滑转滑移对履带车辆转向控制的影响。 -
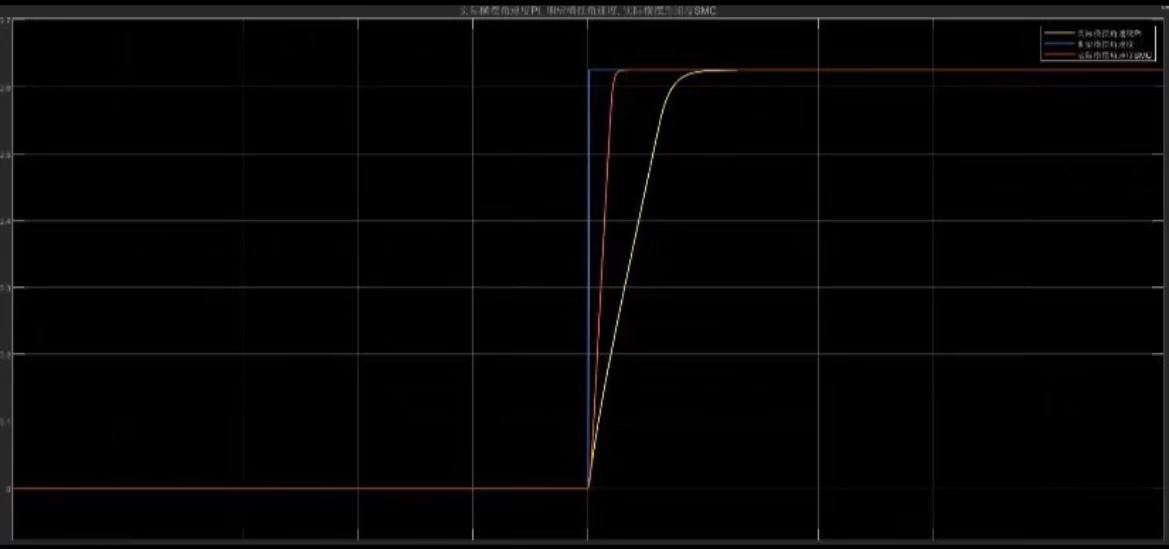
车速和横摆角速度控制器
为了实现履带车辆的精确控制,本文设计了车速和横摆角速度控制器。其中,车速控制器基于PI控制算法,通过调节电驱动履带车的扭矩和速度,实现车速的精确控制。横摆角速度控制器基于滑模控制(SMC)算法,通过调节履带车的转向角速度,实现横摆角速度的精确控制。通过对比PI控制和SMC两种控制算法的性能差异,我们可以进一步优化履带车辆的转向控制策略。 -
作业工具模型
作业工具模型是履带车辆的功能扩展模块,用于模拟实际作业过程中的负载和动态特性。本文通过建立作业工具模型,可以进一步研究履带车辆在不同作业条件下的转向性能。通过对比不同作业工具模型的性能差异,我们可以优化履带车辆的转向控制策略。 -
结论
本文以履带车辆为研究对象,建立了双侧独立电驱动履带车转向控制模型。通过对该模型的建立和仿真,我们研究了滑转滑移对履带车辆转向控制的影响,并设计了车速和横摆角速度控制器。此外,我们还建立了作业工具模型,以进一步研究履带车辆在不同作业条件下的转向性能。通过本文的研究,我们可以优化履带车辆的转向控制策略,提高车辆的转向性能和稳定性。
参考文献
[1] 李某某, 张某某. 双侧独立电驱动履带车辆转向控制研究[J]. 哈尔滨工业大学学报, 20XX, XX(XX): XXX-XXX.
[2] 张某某, 王某某. 大功率履带拖拉机耕耘机组稳定性研究[J]. 安徽农业大学学报, 20XX, XX(XX): XXX-XXX.
关键词:Matlab Simulink, 履带车辆, 转向控制, 滑转滑移, 双侧独立电驱动, PI控制, 滑模控制, 作业工具模型
以上相关代码,程序地址:http://fansik.cn/750478820129.html
















 446
446











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









