







Dijkstra算法是求源点到其它各个顶点的最短路径,如果求解任意两个顶点的最短路径,则需要以每个顶点为源点,重复调用n次Dijkstra算法。完全没必要这么麻烦,下面介绍的Floyd算法可以求解任意两个顶点的最短路径。Floyd 算法又称为插点法,其算法核心是在顶点i到顶点j之间,插入顶点k,看是否能够缩短i和j之间距离(松弛操作)。
算法步骤:
- 数据结构。 设置地图的带权邻接矩阵为G.Edge[],即如果从顶点i到顶点j有边,
就让G.Edge[jJi]=<i,j>的权值,否则G.Edge [j]i]=∞(无穷大);采用两个辅助数组:
最短距离数组dist[i][i],记录从i到j顶点的最短路径长度;前驱数组p[i][i],记录
从i到j顶点的最短路径上i顶点的前驱。 - 初始化。 初始化dist[i][i]= G.Edge[i][i],如果顶点i到顶点j有边相连,初始化p[i][i]=i,
否则p[i][i]=-1。 - 插点。其是就是在i,j 之间插入顶点k,看是否能够缩短i和j之间距离(松弛操作)。
如果dist[i][j]>dist[i][k]+dist[k][i],则dist[i][i]=dist[i][k]+dist[k][],记录顶点j的前驱
为: p[i][j]=p[k][j]。

如上图所示:
- 初始化:
通过邻接矩阵对dist和p进行初始化
- 插点,也就是插入某个点k后其他点i依靠k到达j的距离更短.如果一个节点的出度指向k则可进行借点(插点)操作.这里我们使用三个for循环进行实现,当
dist[i][j]>dist[i][k]+dist[k][i]进行更新dist和p数组. 每一步的结果如下:
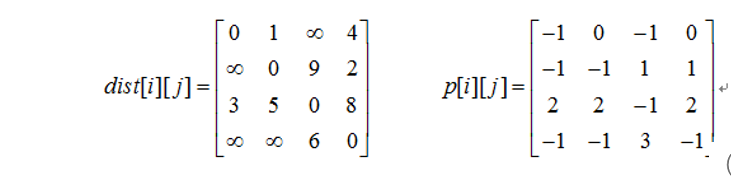
将k = 0,进行插点,结果为:
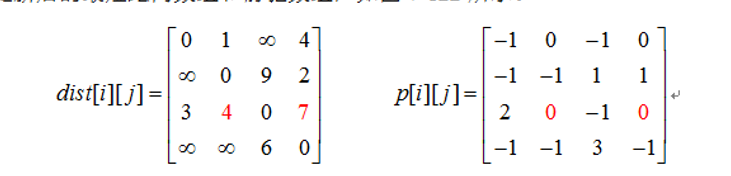
将k = 1进行插点,结果为:
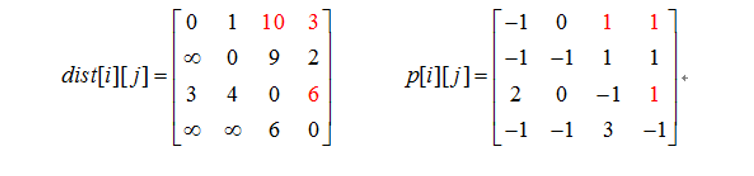
将k = 2进行插点,结果为:
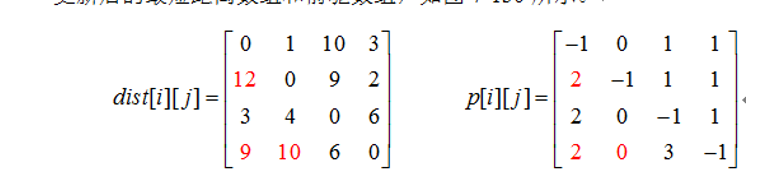
将k = 3 进行插点,结果为:
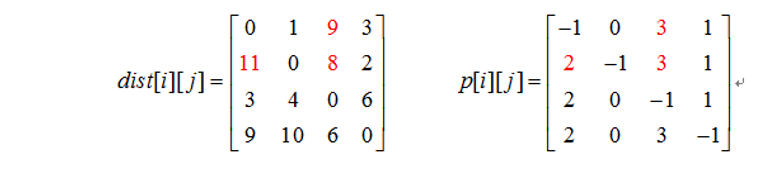
插点结束后。dist[][]数组即为各顶点之间的最短距离,如果想找顶点i到顶点j的最短路径,可以根据前驱数组p获得。例如求1到2的最短路径,首先读取p[1][2]=3,说明顶点2的前驱为3,继续向前找,读取p[1][3]=1,说明3的前驱为1,得到1结束.到2的最短路径为1-- 3-- 2; 求1到0的最短路径,首先读取p[1][0]=2,说明顶点0的前驱为2,继续向前找,读取p[1][2]=3,说明2的前驱为3,继续向前找,读取p[1][3]=1,得到1到0的最短路径为1-- 3-- -2–0;
时间复杂度:三层for语句循环,时间复杂度为0(n^3)。
空间复杂度: 采用两个辅助数组:最短距离数组dist[i][j]和前驱数组p[i][j],因此空间复杂度为O(n^2)。
尽管Floyd算法的时间复杂度为O(n^3),但其代码简单,对于中等输入规模来说,仍然相当有效。如果用Dijkstra算法求解各个顶点之间的最短路径,则需要以每个顶点为源点调用一次,一共调用n次,其总的时间复杂度也为O(n3)。特别注意的是,Dijkstra 算法无法处理处理带负权值边的图,Floyd 算法可以处理带负权值边的图,但是不允许图中包含带负权值边组成的回路。
参考代码
#include <iostream>
#include<cstring>
#include<windows.h>
using namespace std;
#define MaxVnum 100 //顶点数最大值
const int INF=1e7; // 无穷大10000000
typedef string VexType; //顶点的数据类型,根据需要定义
typedef int EdgeType; //边上权值的数据类型,若不带权值的图,则为0或1
typedef struct {
VexType Vex[MaxVnum];
EdgeType Edge[MaxVnum][MaxVnum];
int vexnum,edgenum; //顶点数,边数
} AMGragh;
int dist[MaxVnum][MaxVnum],p[MaxVnum][MaxVnum];
int locatevex(AMGragh G,VexType x) {
for(int i=0; i<G.vexnum; i++) //查找顶点信息的下标
if(x==G.Vex[i])
return i;
return -1;//没找到
}
void CreateAMGraph(AMGragh &G) { //创建无向图的邻接矩阵
int i,j,w;
VexType u,v;
cout << "请输入顶点数:"<<endl;
cin>>G.vexnum;
cout << "请输入边数:"<<endl;
cin>>G.edgenum;
cout << "请输入顶点信息:"<<endl;
for(int i=0; i<G.vexnum; i++) //输入顶点信息,存入顶点信息数组
cin>>G.Vex[i];
for(int i=0; i<G.vexnum; i++) //初始化邻接矩阵所有值为0,若是网,则初始化为无穷大
for(int j=0; j<G.vexnum; j++)
if(i!=j)
G.Edge[i][j]=INF;
else
G.Edge[i][j]=0; //注意i==j时,设置为0
cout << "请输入每条边依附的两个顶点及权值:"<<endl;
while(G.edgenum--) {
cin>>u>>v>>w;
i=locatevex(G,u);//查找顶点u的存储下标
j=locatevex(G,v);//查找顶点v的存储下标
if(i!=-1&&j!=-1)
G.Edge[i][j]=w; //有向图邻接矩阵存储权值
}
}
void Floyd(AMGragh G){
//int i,j,k;
for(int i = 0; i < G.vexnum; i++){
for(int j = 0; j < G.vexnum; j++){
dist[i][j] = G.Edge[i][j];//有路径则初始化为路径长
if(dist[i][j] < INF && i!= j){
p[i][j] = i;// 如果i-->j之间有路径,则将j的前驱置为i
}else{
p[i][j] = -1;//无路径则置为-1
}
}
}
for(int k = 0; k <G.vexnum; k++){// 依次插入 k节点 更新最短路径dist和前驱数组p
for(int i = 0; i < G.vexnum; i++){
for(int j = 0; j < G.vexnum; j++){
if(dist[i][k]+dist[k][j]<dist[i][j]){//如果i经k到j有更短的路径
dist[i][j] = dist[i][k]+dist[k][j];//更新dist[i][j]
p[i][j] = p[k][j];//更改j的前驱为p[k][j] 不能直接更新为k 因为k-->j不一定是直达的,中间可能还有其他节点.
}
}
}
}
}
void print(AMGragh G){
for(int i = 0; i < G.vexnum; i++){//输出最短距离数组
for(int j = 0; j < G.vexnum; j++){
cout<<dist[i][j]<<"\t";
}
cout<<endl;
}
cout<<endl;
for(int i = 0; i < G.vexnum; i++){//输出前驱数组
for(int j = 0; j < G.vexnum; j++){
cout<<p[i][j]<<"\t";
}
cout<<endl;
}
}
void DisplayPath(AMGragh G,int s,int t){//显示最短路径
if(p[s][t]!=-1){
DisplayPath(G,s,p[s][t]);
cout<<G.Vex[p[s][t]]<<"-->";
}
}
int main()
{
VexType start,destination;
int u,v;
AMGragh G;
CreateAMGraph(G);
Floyd(G);
print(G);
cout<<"请依次输入路径的起点和终点名称:";
cin>>start>>destination;
u = locatevex(G,start);
v = locatevex(G,destination);
DisplayPath(G,u,v);
cout<<G.Vex[v]<<endl;
cout<<"最短路径的长度为:"<<dist[u][v]<<endl;
cout<<endl;
return 0;
}
/*
0 1 1
0 3 4
1 2 9
1 3 2
2 0 3
2 1 5
2 3 8
3 2 6
*/
运行结果(就是例子那幅图):

















 6656
6656











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











