







前言
在本文首先介绍了引入齐次坐标系的必要性,随后介绍了在几何变换中常见的投射变换和仿射变换,这俩种变换在计算机视觉问题中,包括在相机成像过程中都是很基础并且重要的内容。
如有谬误,请联系指正。转载请注明出处。
∇ \nabla ∇ 联系方式:
e-mail: FesianXu@gmail.com
QQ: 973926198
github: https://github.com/FesianXu
知乎专栏: 计算机视觉/计算机图形理论与应用
微信公众号:

文章目录
齐次坐标系的引入
投影变换的背景
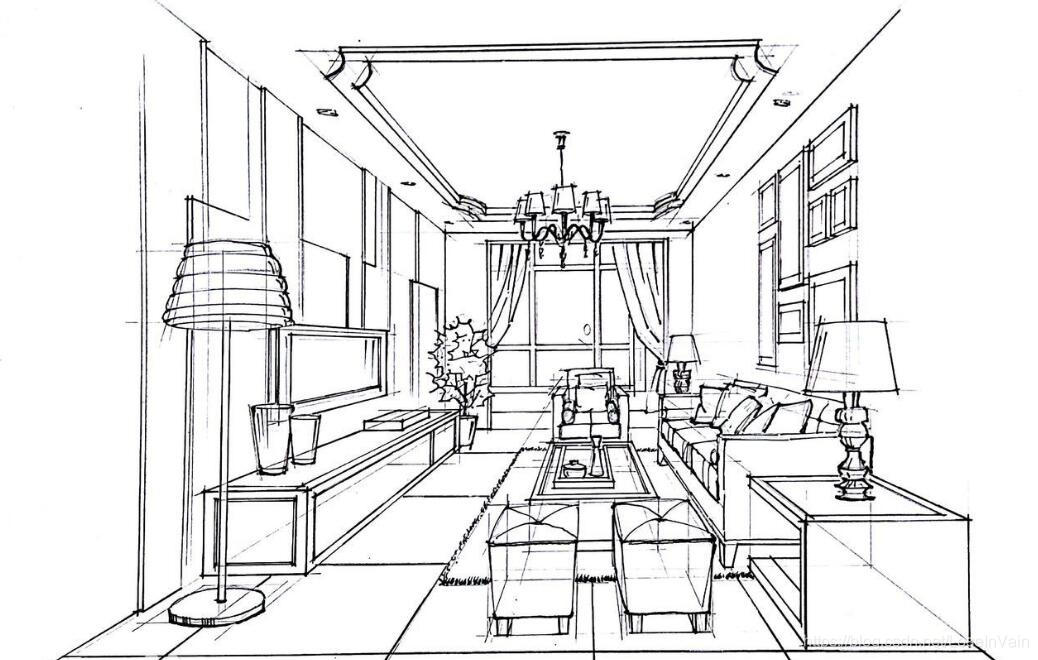
我们对于投影变换(projective transformation) 其实是一点的不陌生的,假设我们在看一张照片时,我们经常会发现本来应该是平行的线条,却变得不平行了,如Fig 1.1所示。更一般地说,在投影变换中,大部分的几何属性,比如长度,角度,比例,平行性等,都可能不能保留了,但是有一点我们是可以确保的,那就是 直线在变换前后始终还是直线。

我们考虑到在欧式几何(Euclidean Geometry)中,其实有一些概念是有些“麻烦之处”的,比如说到平行这个概念,我们知道在欧几里德空间中,两个直线都会交于一点,当然除了平行线之外,这让平行线处于在一个很特殊的地位。如果我们熟悉编程我们就不难发现,当有个编程对象处于特殊地位时,我们就不得不单独考虑他,使得整个程序变得不能通用(general)起来,这个是个糟糕的事情。
当然,我们也可以耍滑头,说在欧几里德空间里,平行线相交于无限远的点处,这当然没问题。但是,“无限远”这种概念其实是为了方便定义出来的,实际上并不存在。不管怎么样,我们把平行线相交于的无限远的点,称之为 理想点(Ideal point)。
通过添加了这个理想点,我们把欧几里德空间(Euclidean Space)转变成了投影空间(Projective Space),很简单吧,但是我们后面将会发现,我们的很多投影变换都只能在投影空间中进行,在没有定义出理想点的欧式空间,我们根本对这些变换无能为力。总而言之, 在投影空间中,所有的线最终都能够相交了。因为所有的理想点都有着相同的距离,所以在二维的投影空间中,所有的平行线其实都是交于由所有理想点组成的“理想直线”上的。同样的,在三维投影空间中,所有的平行面都交于一个“理想平面”。我们如果用符号 R 2 \mathbb{R}^{2} R2表示二维的欧式空间,那么用 P 2 \mathbb{P}^{2} P2表示二维的投影空间。
坐标表达
我们都知道一个在二维平面上的点可以用一组有序的二元对表示,如 ( x , y ) (x,y) (x,y)。我们在此引入 齐次坐标(homogeneous coordinate) 的表达,我们将同样的二维点 ( x , y ) (x,y) (x,y)表示成 ( x , y , 1 ) (x,y,1) (x,y,1),并且,其等价于 ( k x , k y , k ) , k ≠ 0 (kx, ky, k), k \neq 0 (kx,ky,k),k=0。 我们发现,基本上所有的齐次坐标表达 ( x , y , c ) (x,y,c) (x,y,c),都可以找到相对应的非齐次坐标表达方式 ( x / c , y / c , 1 ) (x/c, y/c, 1) (x/c,y/c,1),除了一个最为特殊的点 ( x , y , 0 ) (x,y,0) (x,y,0)。这个点如果硬要用非齐次的方式去表示,那么只能表示为 ( x / 0 , y / 0 , 1 ) (x/0, y/0, 1) (x/0,y/0,1),我们发现,这个方式其实就是在齐次坐标系里面定义出了理想点这个概念,并且的,这个处于无限远处的理想点和普通点有着一致的表达方式,意味着可以用和普通点一样的处理方式去处理理想点这个概念了。
这个正是投影空间的精髓之处,在投影空间中,我们用齐次坐标去表示点,把空间中的点所有都看成是等价的,这样就不存在普通点与理想点的区别了,而且在这个空间中,所有的直线都会相交,因此也不存在平行性这个概念了。笔者在这里举个在投影空间处理点的变换的例子,假如现在在投影空间
P
n
\mathbb{P}^{n}
Pn中定义了一个变换,我们首先用齐次坐标表示这个空间中的元素先,其是一个
(
n
+
1
)
(n+1)
(n+1)维的向量,然后,我们定义这个变换,这个变换应该是一个矩阵,我们称之为单应性矩阵(homography),
H
∈
R
(
n
+
1
)
×
(
n
+
1
)
\mathcal{H} \in \mathbb{R}^{(n+1) \times (n+1)}
H∈R(n+1)×(n+1),因此这个变换结果最后为:
X
′
=
H
X
(1.1)
\mathbf{X}^{\prime} = \mathcal{H} \mathbf{X} \tag{1.1}
X′=HX(1.1)
通过这种方法,我们会发现我们同时可以考虑在欧式空间中的平行线和非平行线。这对处理投影变换非常的方便,因为投影变换是不保留平行性这个几何属性的,因此在变换的过程中,可能需要将平行线变换成非平行的。
仿射变换和透视变换
投影变换可以细分为 仿射变换(affine transform) 和 透视变换(perspective transform),以及 广义的投影变换(general projective transform)。我们分别介绍下。
PS:注意,我们这里的点是二维点,也就是
x
=
(
u
,
v
,
1
)
T
∈
R
3
\mathbf{x} = (u,v,1)^{\mathrm{T}} \in \mathbb{R}^3
x=(u,v,1)T∈R3,因此,单应性矩阵是
H
∈
R
3
×
3
\mathcal{H} \in \mathbb{R}^{3 \times 3}
H∈R3×3。如果延展到三维空间的点变换,那么点就是三维点,为
X
=
(
u
,
v
,
w
,
1
)
T
∈
R
4
\mathbf{X} = (u,v,w,1)^{\mathrm{T}} \in \mathbb{R}^4
X=(u,v,w,1)T∈R4,单应性矩阵
H
∈
R
4
×
4
\mathcal{H} \in \mathbb{R}^{4 \times 4}
H∈R4×4。
仿射变换
仿射变换(affine transform)在变换前后,保留了元素的平行性,也就是说,在变换前是平行线的,在变换后同样也是平行线。仿射变换可以表示为一组线性变换,如(2.1),同时,在齐次表达下,仿射变换通常可以用一个
2
×
3
2 \times 3
2×3的矩阵表达(二维情况下),如(2.2)。
[
x
y
]
=
[
a
11
u
+
a
12
v
+
a
13
a
21
u
+
a
22
v
+
a
23
]
(2.1)
\left[ \begin{matrix} x \\ y \end{matrix} \right] = \left[ \begin{matrix} a_{11} u + a_{12} v + a_{13} \\ a_{21} u + a_{22} v + a_{23} \end{matrix} \right] \tag{2.1}
[xy]=[a11u+a12v+a13a21u+a22v+a23](2.1)
[ x y 1 ] = [ a 11 a 12 a 13 a 21 a 22 a 23 0 0 1 ] [ u v 1 ] (2.2) \left[ \begin{matrix} x \\ y \\ 1 \end{matrix} \right] = \left[ \begin{matrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ 0 & 0 & 1 \end{matrix} \right] \left[ \begin{matrix} u \\ v \\ 1 \end{matrix} \right] \tag{2.2} ⎣⎡xy1⎦⎤=⎣⎡a11a210a12a220a13a231⎦⎤⎣⎡uv1⎦⎤(2.2)
通过对这六个元素的某些约束,比如令某些为0,为1等,我们将仿射变换又分成了以下若干种。
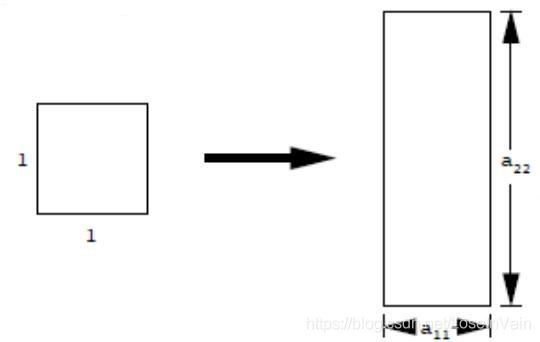
尺度放缩(scale)
尺度放缩(scale)的变换矩阵如:
H
=
[
a
11
0
0
0
a
22
0
0
0
1
]
(2.3)
\mathcal{H} = \left[ \begin{matrix} a_{11} & 0 & 0\\ 0 & a_{22} & 0 \\ 0 & 0 & 1 \end{matrix} \right] \tag{2.3}
H=⎣⎡a11000a220001⎦⎤(2.3)
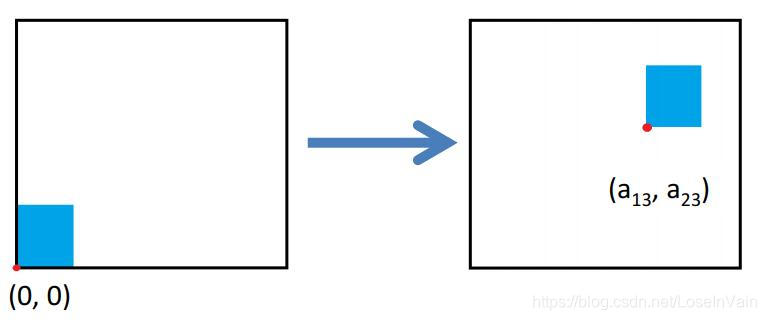
平移(translate)
平移(translate)的变换矩阵如:
H
=
[
1
0
a
13
0
1
a
23
0
0
1
]
(2.4)
\mathcal{H} = \left[ \begin{matrix} 1 & 0 & a_{13}\\ 0 & 1 & a_{23} \\ 0 & 0 & 1 \end{matrix} \right] \tag{2.4}
H=⎣⎡100010a13a231⎦⎤(2.4)
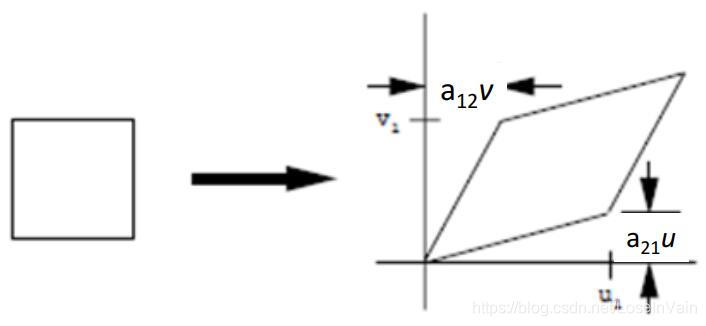
切变(shear)
切变(shear)的变换矩阵如:
H
=
[
1
a
12
0
a
21
1
0
0
0
1
]
(2.5)
\mathcal{H} = \left[ \begin{matrix} 1 & a_{12} & 0\\ a_{21} & 1 & 0 \\ 0 & 0 & 1 \end{matrix} \right] \tag{2.5}
H=⎣⎡1a210a1210001⎦⎤(2.5)
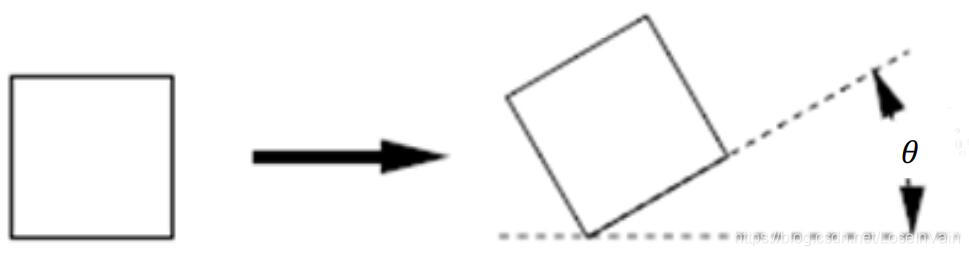
旋转(rotate)
旋转(rotate)的变换矩阵如:
H
=
[
cos
(
θ
)
−
sin
(
θ
)
0
sin
(
θ
)
cos
(
θ
)
0
0
0
1
]
(2.6)
\mathcal{H} = \left[ \begin{matrix} \cos(\theta) & -\sin(\theta) & 0\\ \sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1 \end{matrix} \right] \tag{2.6}
H=⎣⎡cos(θ)sin(θ)0−sin(θ)cos(θ)0001⎦⎤(2.6)
可组合性
注意到仿射变换其是可以组合的,比如一个变换可以是先平移,后旋转,最后放缩,那么其变换矩阵为:
H
=
S
(
(
R
(
T
X
)
)
)
(2.7)
\mathcal{H} = \mathcal{S}((\mathcal{R}(\mathcal{T}\mathbf{X}))) \tag{2.7}
H=S((R(TX)))(2.7)
其中
S
\mathcal{S}
S代表放缩变换,
R
\mathcal{R}
R代表旋转变换,
T
\mathcal{T}
T代表平移变换。
但是,我们也要注意到,一般来说其是不具有交换性的,比如先平移在旋转一般结果和先旋转后平移是不同的,即是:
T
R
≠
R
T
(2.8)
\mathcal{T}\mathcal{R} \neq \mathcal{R}\mathcal{T} \tag{2.8}
TR=RT(2.8)
其本质是矩阵乘法的不可交换性。
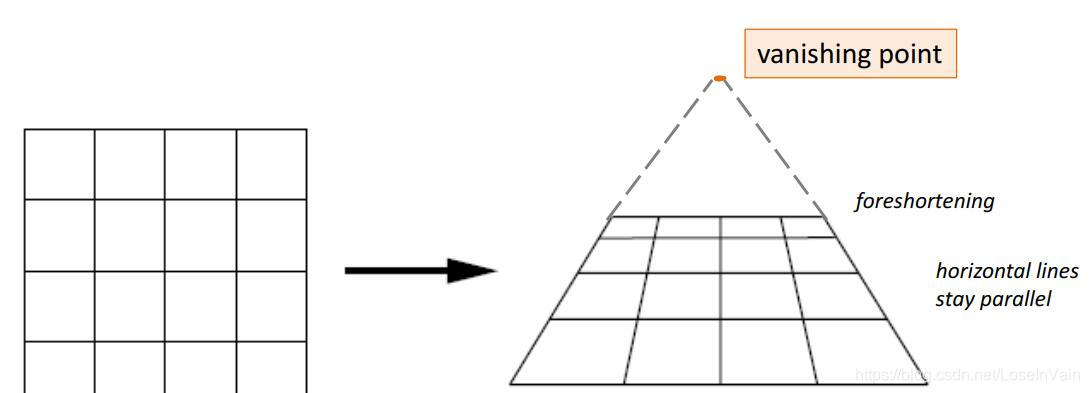
透视变换
透视变换(perspective transform)在变换前后不再保留所有元素的平行性了,但是变换前后,直线还是保持是直线,使用这种变换能提供3D的视觉效果。
我们同样用齐次坐标去表示这个变换,其变换矩阵的形式如:
[
1
0
0
0
1
0
a
31
a
32
1
]
(3.1)
\left[ \begin{matrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ a_{31} & a_{32} & 1 \end{matrix} \right] \tag{3.1}
⎣⎡10a3101a32001⎦⎤(3.1)
观察变换过程(3.2),我们发现本来在仿射变换中为1的
w
w
w不再是1了。
[
1
0
0
0
1
0
a
31
a
32
1
]
[
u
v
1
]
=
[
u
v
a
31
u
+
a
32
v
+
1
=
w
]
(3.2)
\left[ \begin{matrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ a_{31} & a_{32} & 1 \end{matrix} \right] \left[ \begin{matrix} u \\ v \\ 1 \end{matrix} \right] = \left[ \begin{matrix} u \\ v \\ a_{31} u + a_{32} v + 1 = w \end{matrix} \right] \tag{3.2}
⎣⎡10a3101a32001⎦⎤⎣⎡uv1⎦⎤=⎣⎡uva31u+a32v+1=w⎦⎤(3.2)
将其表示为非齐次的形式,我们有:
[
u
/
w
v
/
w
1
]
\left[ \begin{matrix} u/w \\ v/w \\ 1 \end{matrix} \right]
⎣⎡u/wv/w1⎦⎤
我们发现其是一个非线性变换,因此,透视变换其是一个非线性变换,处于无限远处的点可能会被移到有限处,处于有限点也可能会被移到无限点处,正是因为如此,平行性才不能被保留了。
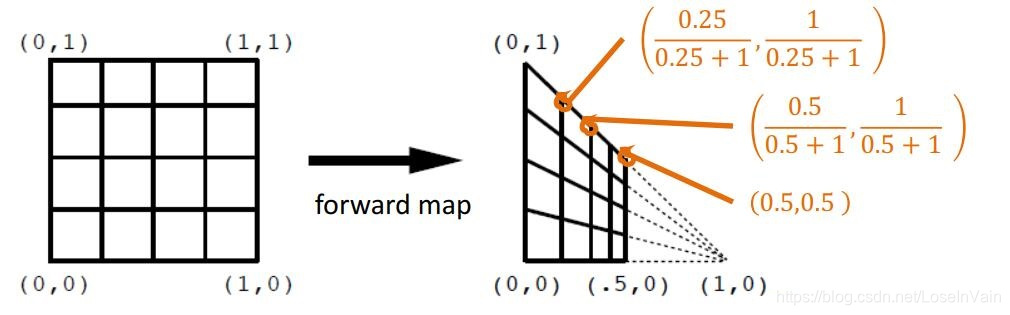
我们这里举个例子,假设有个透视变换矩阵:
H
=
[
1
0
0
0
1
0
1
0
1
]
\mathcal{H} = \left[ \begin{matrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 1 & 0 & 1 \end{matrix} \right]
H=⎣⎡101010001⎦⎤
我们于是有转换过程:
H
[
u
v
1
]
=
[
u
v
u
+
1
]
=
[
u
u
+
1
v
u
+
1
1
]
(3.3)
\mathcal{H} \left[ \begin{matrix} u \\ v \\ 1 \end{matrix} \right] = \left[ \begin{matrix} u \\ v \\ u+1 \end{matrix} \right] = \left[ \begin{matrix} \dfrac{u}{u+1} \\ \dfrac{v}{u+1} \\ 1 \end{matrix} \right] \tag{3.3}
H⎣⎡uv1⎦⎤=⎣⎡uvu+1⎦⎤=⎣⎢⎢⎡u+1uu+1v1⎦⎥⎥⎤(3.3)
我们有:
lim
u
→
∞
u
u
+
1
=
1
lim
u
→
∞
v
u
+
1
=
0
(3.4)
\begin{aligned} \lim_{u \rightarrow \infty} \dfrac{u}{u+1} &= 1 \\ \lim_{u \rightarrow \infty} \dfrac{v}{u+1} &= 0 \end{aligned} \tag{3.4}
u→∞limu+1uu→∞limu+1v=1=0(3.4)
我们发现这个极限点正是其消失点的坐标。
广义投影变换
我们要注意到,透视变换其本质是广义的投影变换中的一种特殊情况,广义透视变换的变换矩阵如:
[
a
11
a
12
a
13
a
21
a
22
a
23
a
31
a
32
a
33
]
(4.1)
\left[ \begin{matrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & a_{33} \end{matrix} \right] \tag{4.1}
⎣⎡a11a21a31a12a22a32a13a23a33⎦⎤(4.1)
同样的,其也是一种非线性变换。在二维情况下我们有:
x
=
a
11
u
+
a
12
v
+
a
13
a
31
u
+
a
32
v
+
a
33
y
=
a
21
u
+
a
22
v
+
a
23
a
31
u
+
a
32
v
+
a
33
\begin{aligned} x &= \dfrac{a_{11} u + a_{12} v + a_{13}}{a_{31} u + a_{32} v + a_{33}} \\ y &= \dfrac{a_{21} u + a_{22} v + a_{23}}{a_{31} u + a_{32} v + a_{33}} \end{aligned}
xy=a31u+a32v+a33a11u+a12v+a13=a31u+a32v+a33a21u+a22v+a23
Reference
[1]. Hartley R, Zisserman A. Multiple View Geometry in Computer Vision[J]. Kybernetes, 2008, 30(9/10):1865 - 1872.















 3139
3139











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











