







 本文详细介绍了计算机控制系统与连续控制系统的区别,强调了计算机控制系统的优点,包括性价比高、灵活性、运算能力等,并讨论了DDC、SCC和DCS的特点。此外,文中还涉及了控制系统设计方法、信号失真处理、采样周期对系统的影响以及计算机控制系统稳定性与稳态误差的关键因素。
本文详细介绍了计算机控制系统与连续控制系统的区别,强调了计算机控制系统的优点,包括性价比高、灵活性、运算能力等,并讨论了DDC、SCC和DCS的特点。此外,文中还涉及了控制系统设计方法、信号失真处理、采样周期对系统的影响以及计算机控制系统稳定性与稳态误差的关键因素。
前言:本习题答案是笔者在学习过程中的总结,若有错误,烦请评论中指出。并且声明,在未经本人同意或未带版权声明情况下,禁止转载,侵权必究。
一、比较计算机控制系统与连续控制系统的结构差别,说明计算机控制系统的优点。
答:
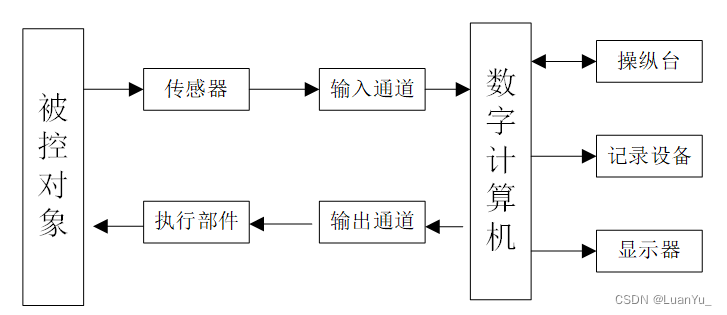
1、结构差别
将连续控制系统中的控制器用数字计算机、AD、DA来代替,就可以构成计算机控制系统。既:用计算机代替模拟控制装置,对被控对象进行调节和控制。
在控制系统中引入数字计算机后,控制规律便可由程序实现,数字计算机执行相应的程序,实现对被控参数的控制。在连续控制系统中,系统的控制规律是由硬件电路实现的,改变控制规律就要改变硬件。
在计算机控制系统中,数字计算机的输入和输出都是数字信号,而变换发送单元送出的信号,以及大多数执行机构所能接收的信号,都是模拟信号。因此,系统中需要有A/D转换器和D/ A转换器。
2、计算机控制系统的优点
(1)功能/价格的性价比高(多回路控制)。
(2)可使用各种数字部件,从而提高系统测量灵敏度并可利用数字通信来传输信息。
(3)运算速度快、精度高、具有极丰富的逻辑判断功能和大容量的存储能力,容易实现复杂的控制规律,极大地提高系统性能。控制算法灵活,由软件程序实现,因此适应性强,灵活性高。
(4)实现自动检测和故障诊断较为方便,故提高了系统的可靠性和容错及维修能力。
(5)使控制和管理更易结合,并实现层次更高的自动化。
(6)促进制造系统向着自动化、集成化、智能化发展。
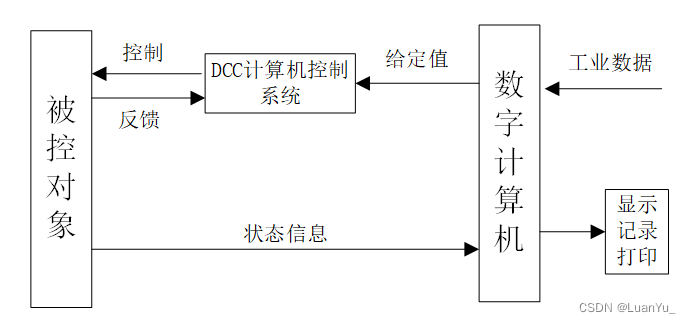
二、以框图的形式给出DDC,SCC,DCS的结构,说明其主要功能特点。
1、DDC
特点:主要控制方式,灵活性大,价格便宜,可以实现多个回路控制。
2、SCC
特点:控制与管理分开,增强系统各部分的独立功能
3、DCS
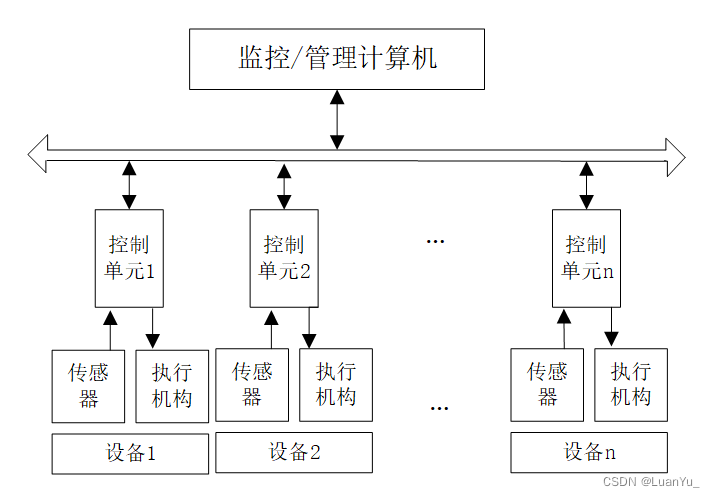
特点:控制分散,管理集中.减小系统局部故障对全系统的影响,提高系统的可靠性。
三、比较说明两种计算机控制系统设计方法的不同。
1、连续域设计-离散化方法
将计算机控制系统看成是连续系统,在连续域上设计得到连续控制器。由于它要在 数字计算机上实现,因此,采用不同方法将其数字化 (离散化)。
2、直接数字域(离散域)设计
把系统看成是纯离散信号系统,直接在离散域进行设计,得到数字控制器,并在计算机里实现。
3、不同
在离散化方法中,采样周期是近似的,是在控制器离散后,不断进行性能检查从而确定。在直接数字域设计方法中,采样周期是精确的。
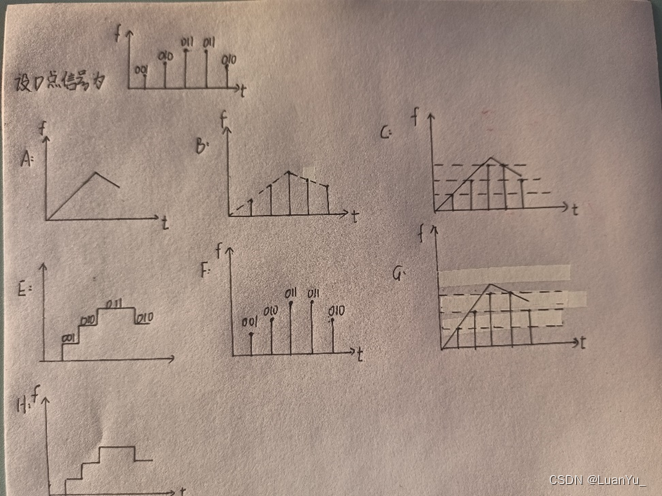
四、参见下图,在D点自拟一个信号,给出其他各点对应的信号形式。
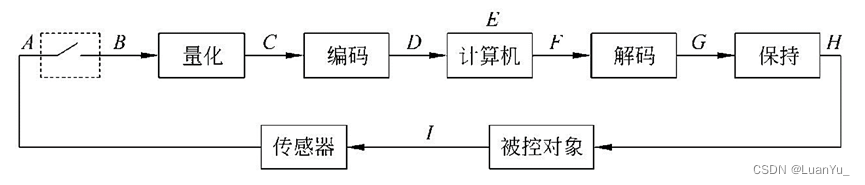
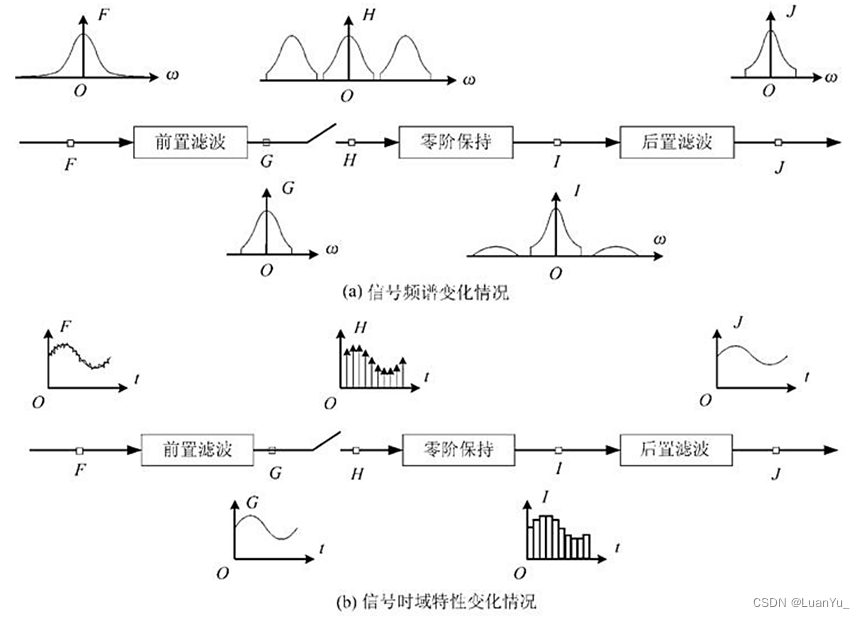
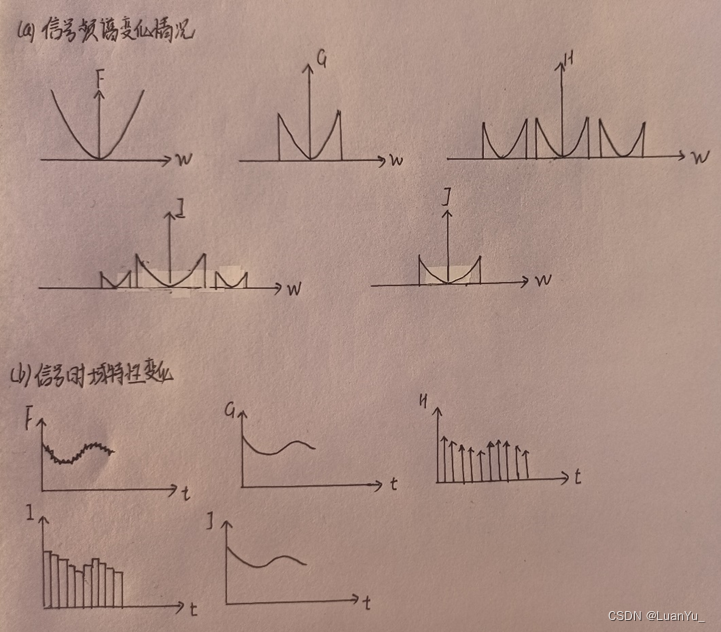
五、参见下图,自拟一个F点信号,给出其他各点对应的信号。
六、说明信号失真的现象有哪几种,各自采取什么措施可以避免或鉴别该现象。
1、假频:信号的高频分量折叠为低频分量;方法为改变采样频率。
2、重叠:如果两个信号的频率相差正好是Ws的整数倍,即W1-W2=nWs,则它们的采样值可能相同;方法为改变采样频率。
3、隐匿振荡:如果连续信号x(t)的频率分量等于采样频率Ws的整数倍时,则该频率分量在采样信号中将会消失;方法为改变采样频率。
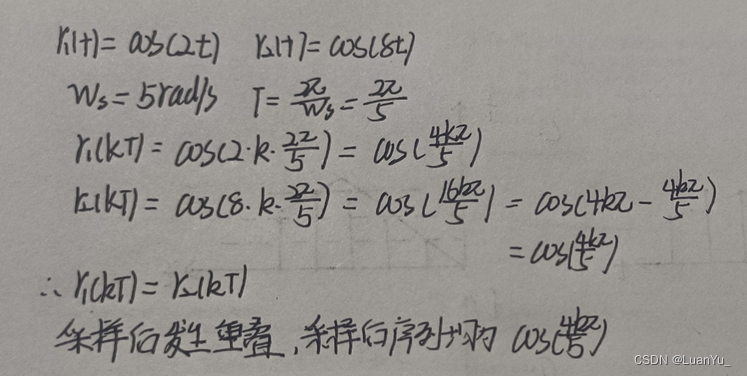
七、对于两个给定的输入r(t)=cos(wt),w1=2,w2=8,采用ws=5进行采样时,分析采样结果。
八、比较说明前置滤波器与后置滤波器的不同。
答:在计算机控制系统中,一定要有前置滤波器,而不是必须要有后置滤波器。
(1)前置滤波器也称抗混叠滤波器,其放置在AD前,可避免混叠,滤除高频干扰。
(2)后置滤波器放置在DA后,当被控对象较灵敏时,可滤除ZOH带来的噪声干扰。
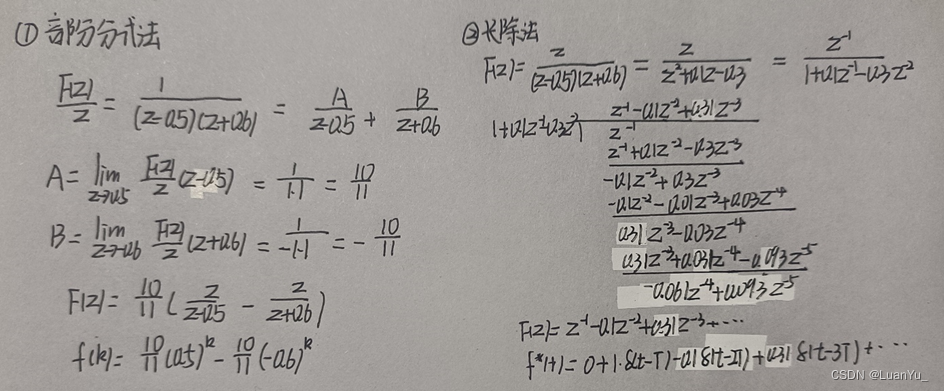
九、已知 ,分别用部分分式法和长除法求出其f(k)。
,分别用部分分式法和长除法求出其f(k)。
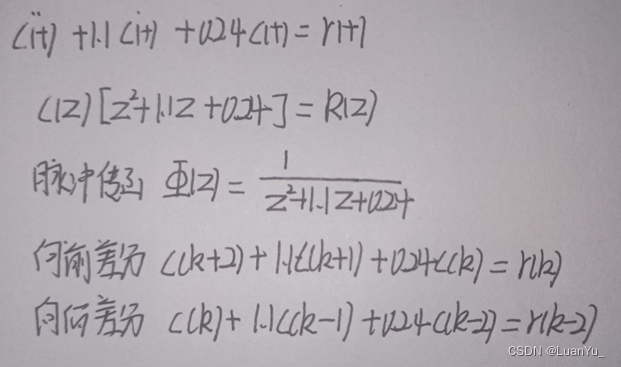
十、已知系统的微分方程 ,试给出其对应的前向、后向差分方程,脉冲传递函数。
,试给出其对应的前向、后向差分方程,脉冲传递函数。
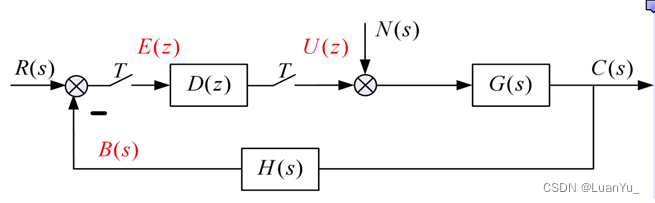
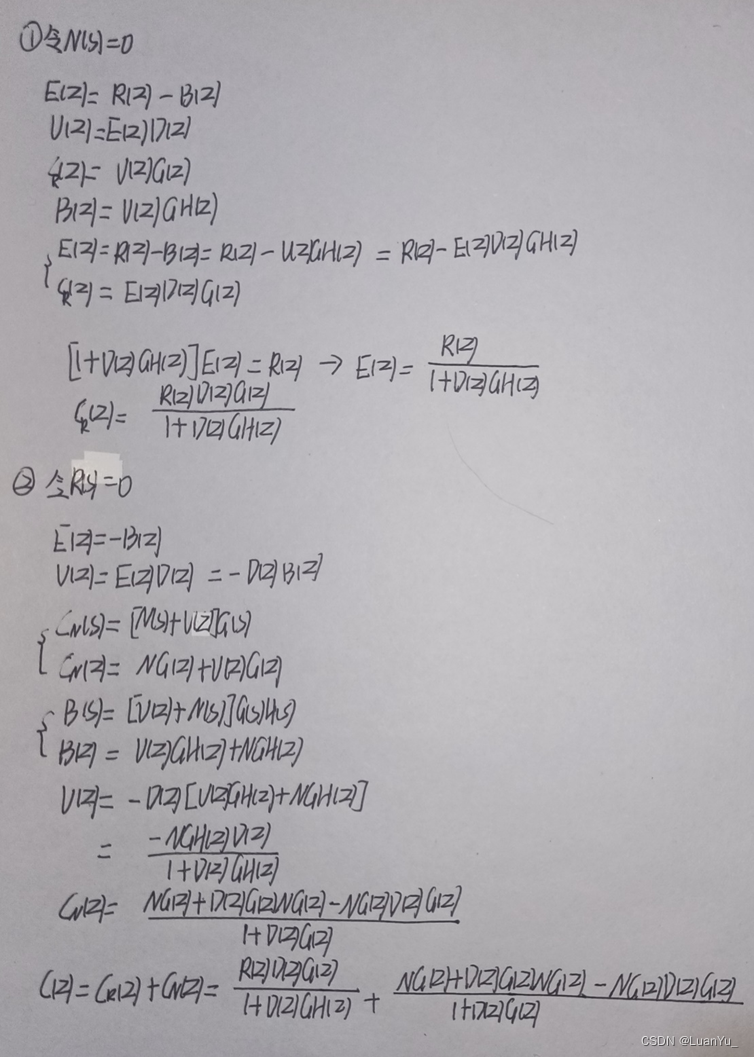
十一、用信号传递的方法推导出下图中系统的总输出C(Z)
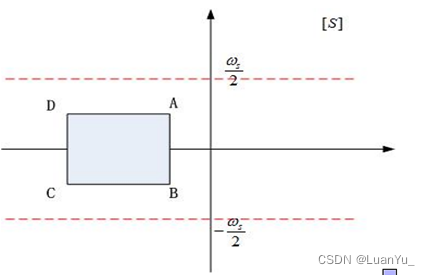
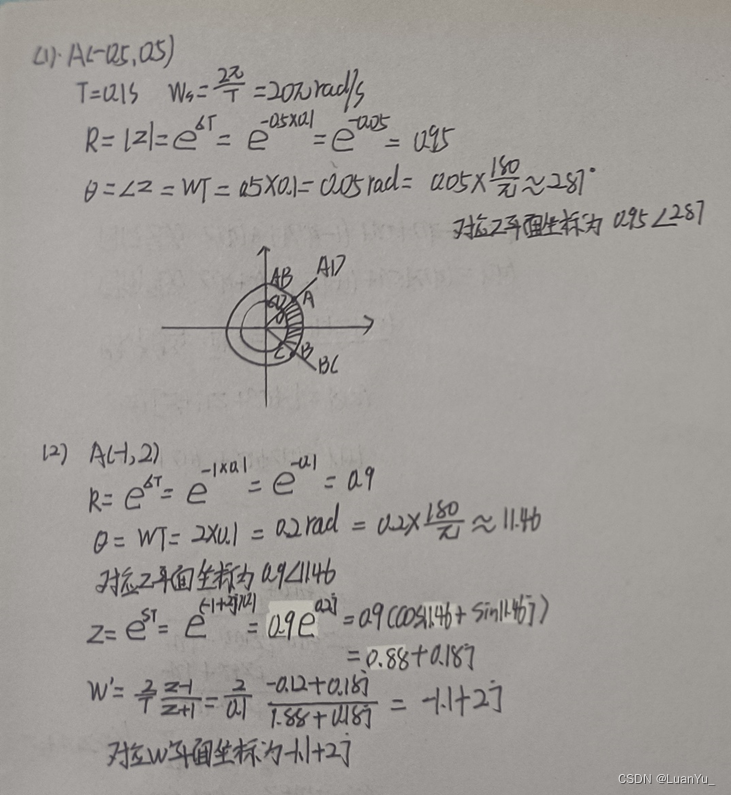
十二、已知S平面:A(-0.5,0.5)区域ABCD,试给出Z平面对应的A点和区域(T=0.1秒) 若A点坐标为(-1,2),试给出该点在Z平面,W’平面对应的坐标
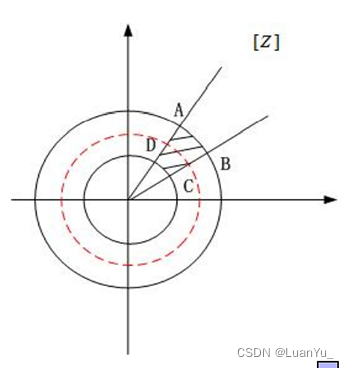
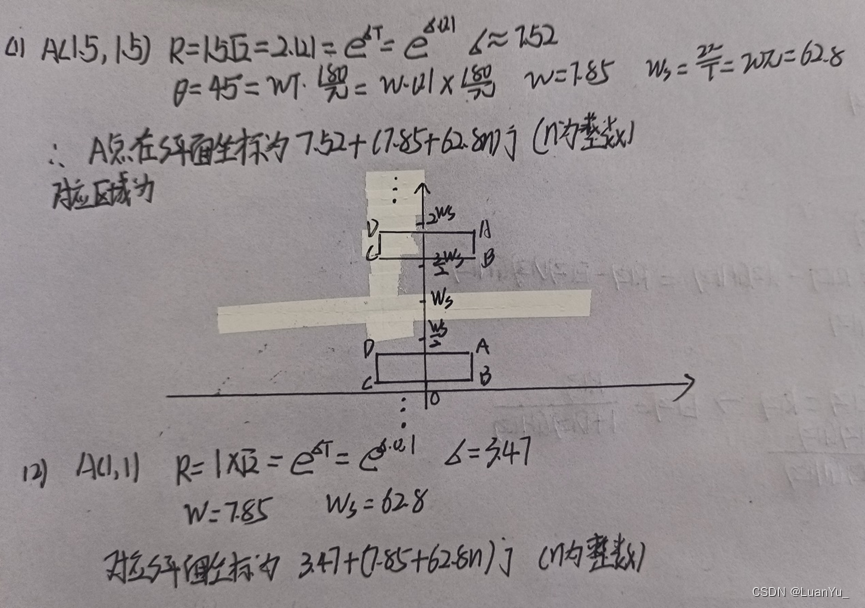
十三、已知Z平面:A(1.5,1.5)区域ABCD,试给出S平面对应的A点和区域(T=0.1秒);若A点坐标为(1,1),试给出该点在S平面对应的坐标。
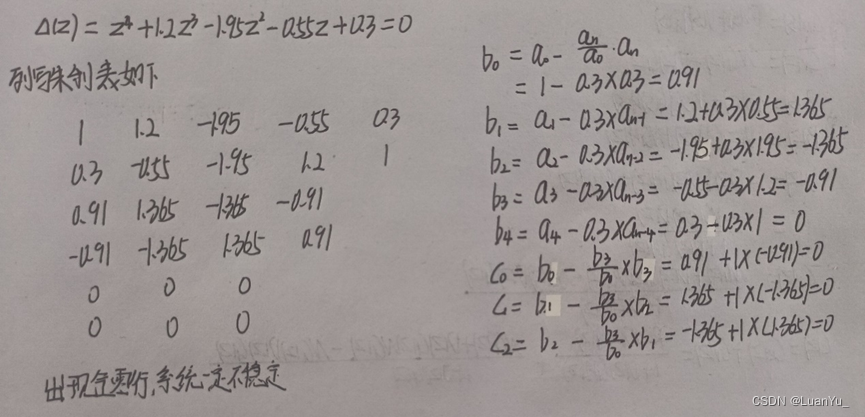
十四、已知系统特征方程  ,判断系统的稳定性。
,判断系统的稳定性。
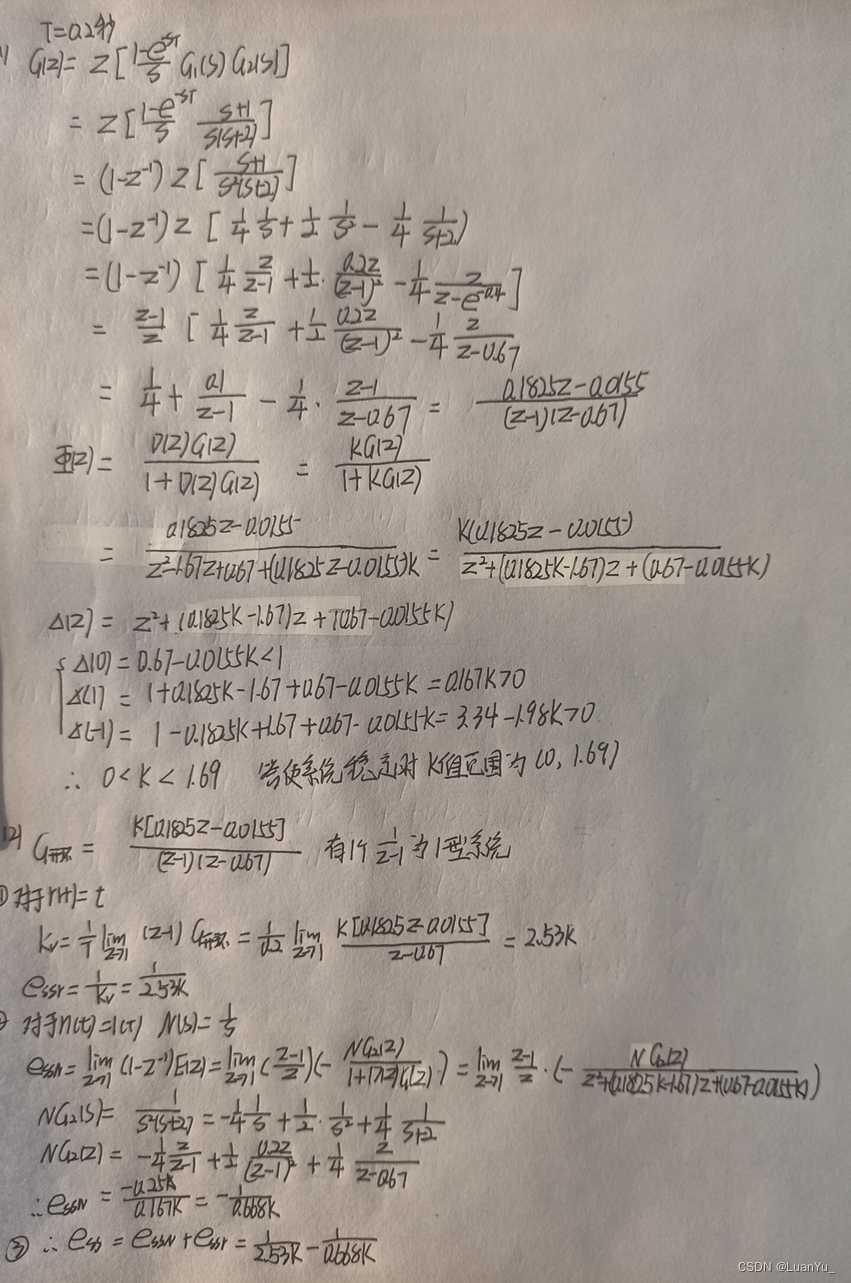
十五、已知计算机控制系统的结构如下图所示:T=0.2秒
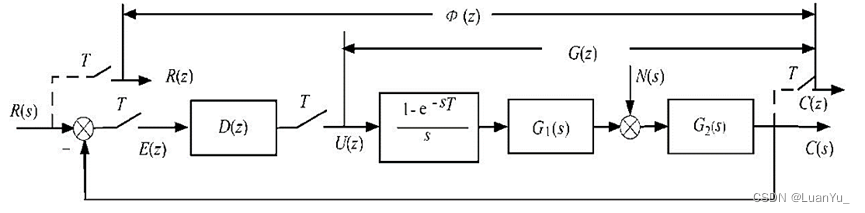
(1)若 ,试确定使系统稳定K值的范围;
(2) 若系统输入单位速度信号,干扰为单位阶跃信号,试给出系统的稳态误差
十六、试分析影响计算机控制系统稳态误差的因素
1、具有ZOH被控对象
稳态误差的计算与T无关,只与对象的类型、输入信号的形式有关
2、不具有ZOH被控对象
稳态误差与采样周期T有关。
十七、试分析影响计算机控制系统稳定性的因素
1、采样周期与系统稳定性
当采样周期T减小时,使系统稳定的K值范围变大;反之,K值范围变小。
2、零阶保持器与系统稳定性
加入零阶保持器后,系统响应上升较慢,振荡性加强,稳定性变差
3、延时与系统稳定性
延时降低系统的稳定性,且离散系统稳定性范围小于连续系统的稳定性范围
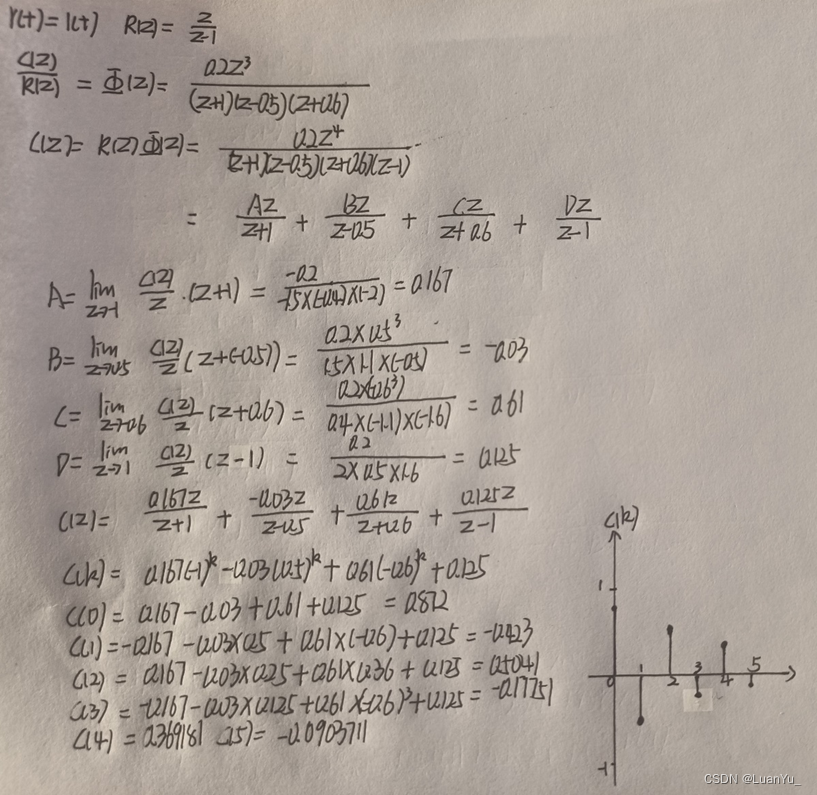
十八、已知系统脉冲传递函数: ,试给出单位阶跃作用下的系统输出C(k)的曲线。
,试给出单位阶跃作用下的系统输出C(k)的曲线。
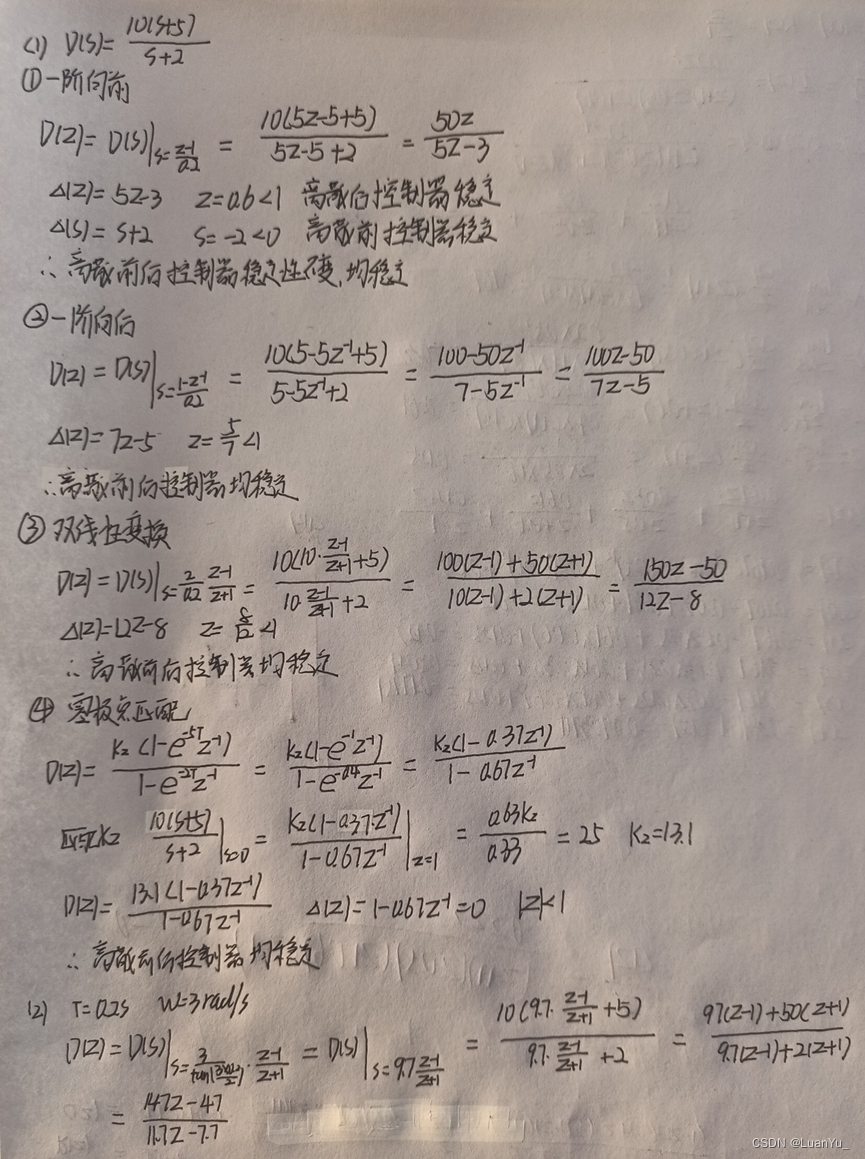
十九、已知连续控制器:
(1)T=0.2秒,分别用一阶向前,一阶向后,双线性,零极点匹配的方法给出其数字控制器的差分方程;并说明离散前后,控制器本身稳定性的变化情况。
(2)T=0.2 秒,若要保持其w=3处的频率特性不变,试给出其控制器D(z)。
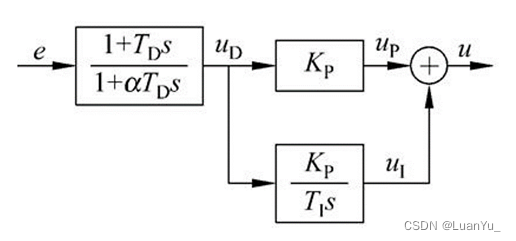
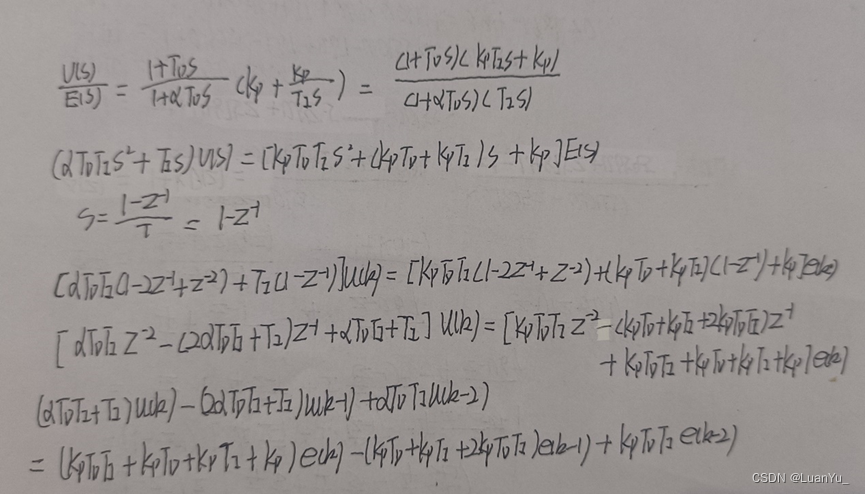
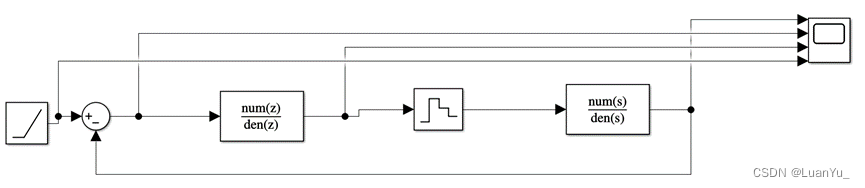
二十、试给出下图控制器的差分方程。
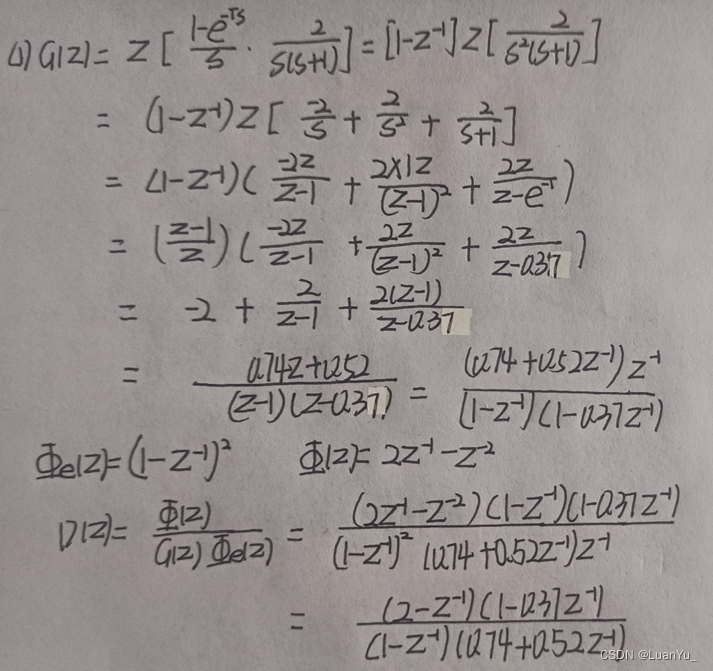
二十一、已知单位负反馈系统中,被控对象: ,T=1秒
,T=1秒
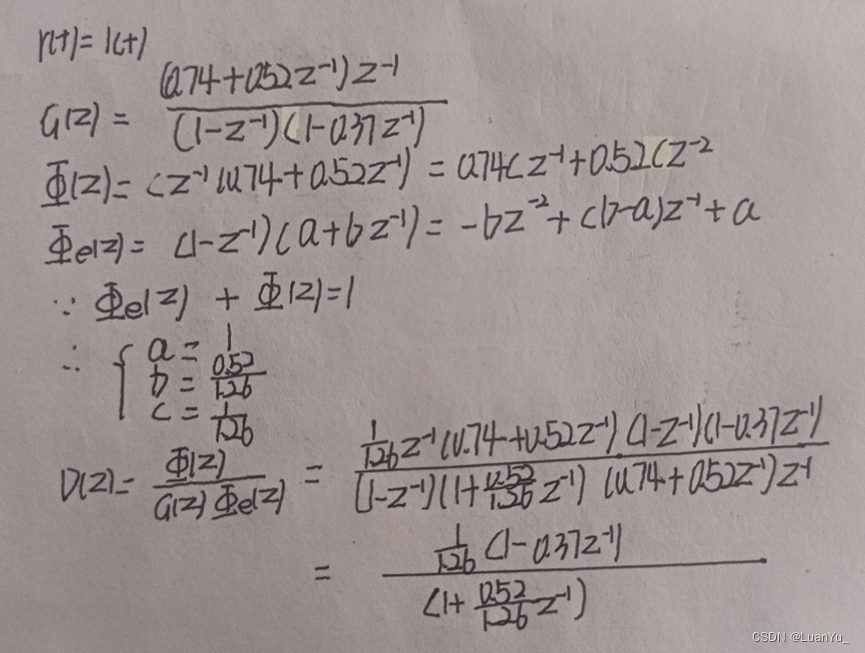
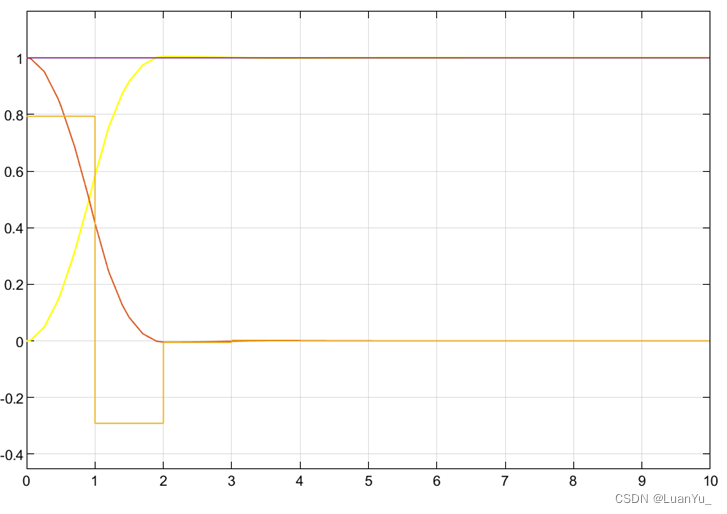
(1)试设计输入为单位速度信号时的最少拍控制器D(z),并画出e(k),u(k)和c(k) 的曲线;分析该控制器对单位阶跃输入信号的控制效果。
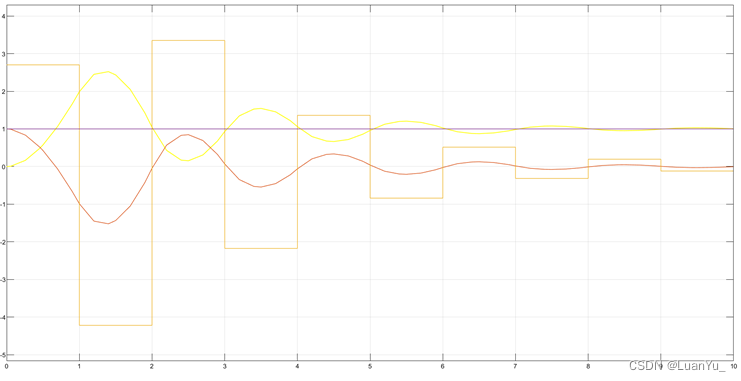
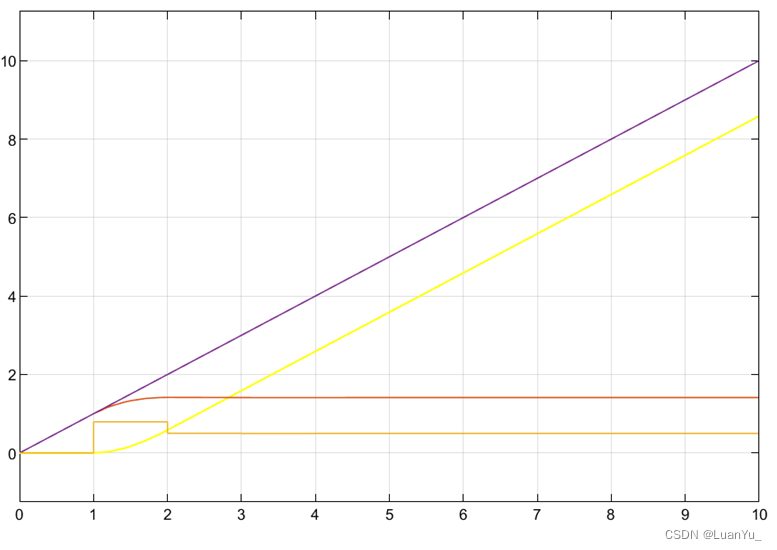
(2)试设计输入为单位阶跃信号时的无纹波有限拍控制器D(z),并画出e(k),u(k)和c(k) 的曲线;分析该控制器对单位速度输入信号的控制效果。
(1)
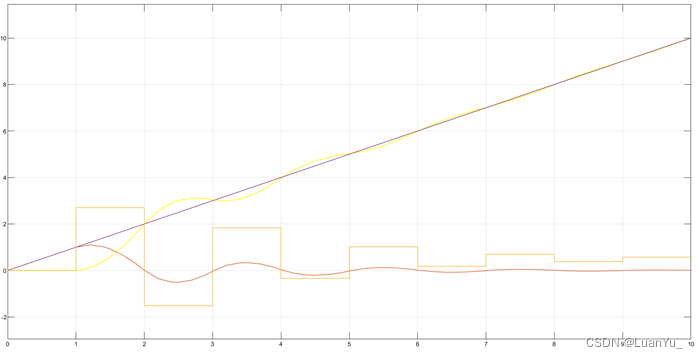
当输入信号为单位阶跃信号时,输出图像如下,可以看出此时控制效果并不好,这正说明最小拍控制系统对输入信号的变化适应性较差。
(2)
当输入信号为单位速度信号时,输出图像如下,由图可以看出,此时无法进行无误差跟踪。

















 975
975

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









