







实验七 采样控制系统的分析
一、实验完成任务
1、熟悉用 LF398 组成的采样控制系统;
2、通过本实验理解采样定理和零阶保持器的原理及其实现方法;
3、观察系统在阶跃作用下的稳态误差。
4.、研究开环增益 K 和采样周期 T 的变化对系统动态性能的影响
二、原理和理论分析
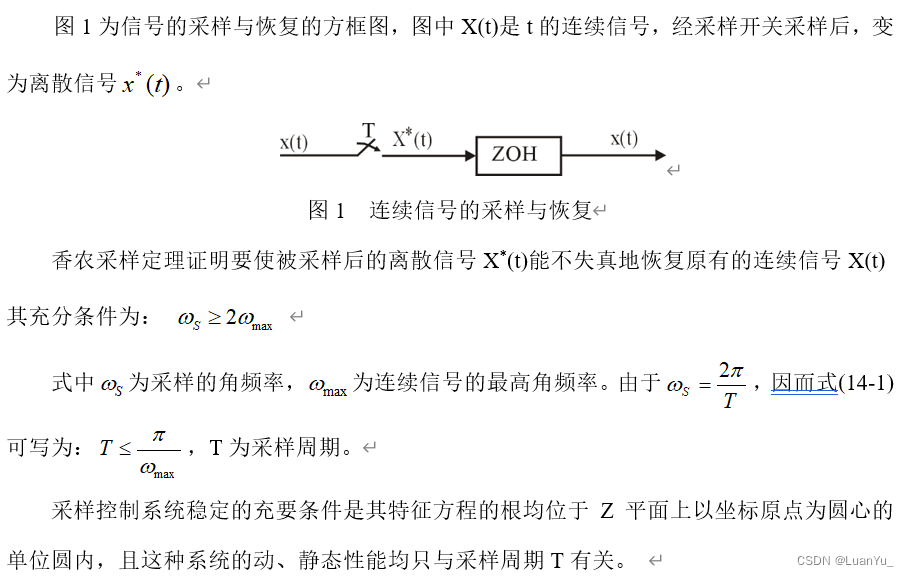
三、实验完成过程及结果
3.1 采样保持分析
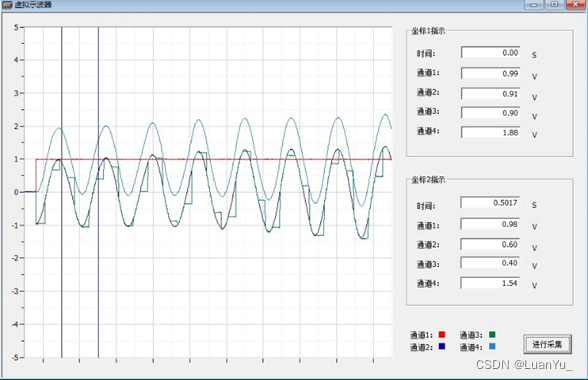
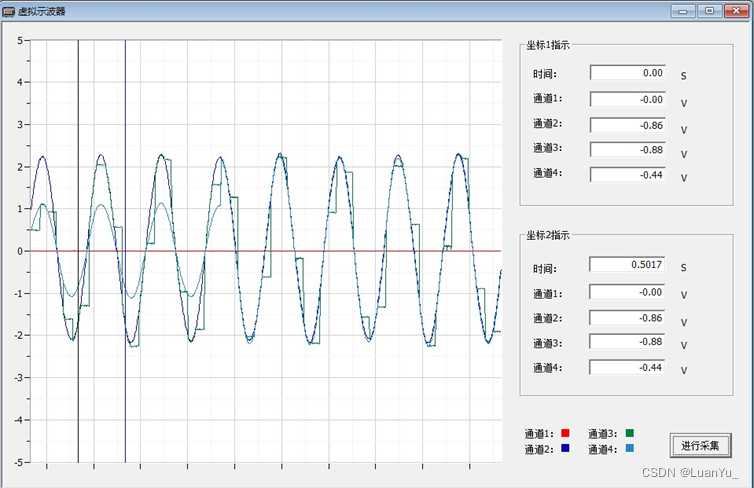
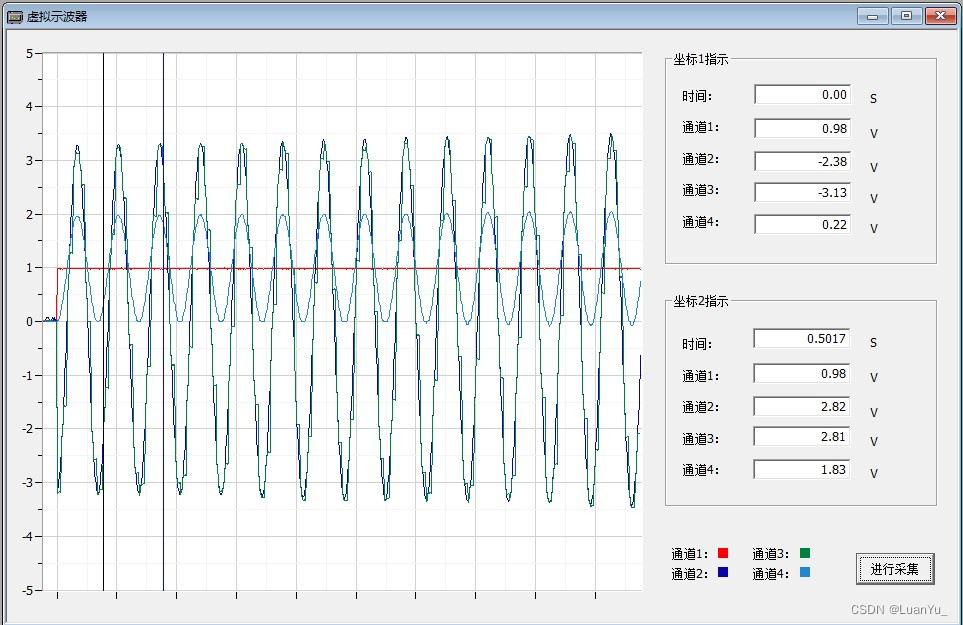
(1)当信号发生器 1 输出为 20Hz 时(有保持和无保持情况):
| 方波(采样产生) 信号 | 有保持 | 无保持 |
| 80 Hz |
|
|
| 73 Hz |
|
|
| 40 Hz |
|
|
| 33 Hz |
|
|
| 20 Hz |
|
|
| 13 Hz |
|
|
| 10 Hz |
|
|
| 6 Hz |
|
|

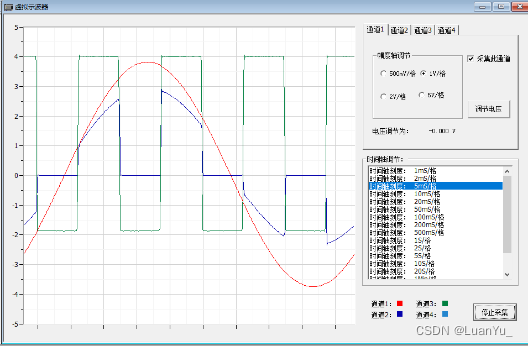
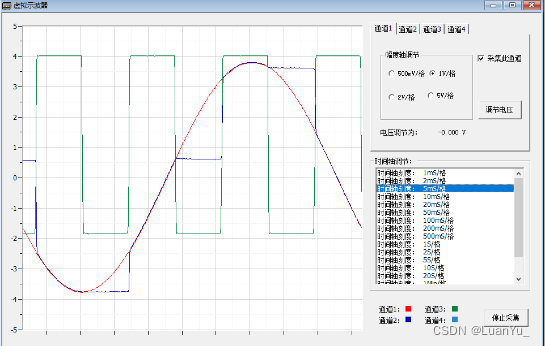
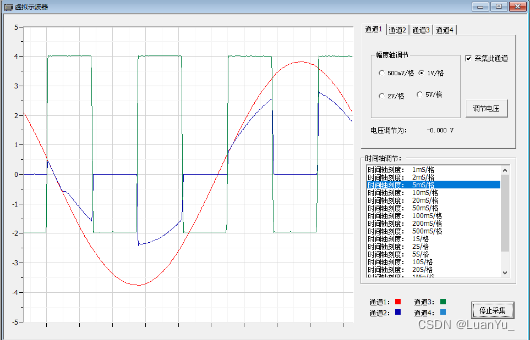

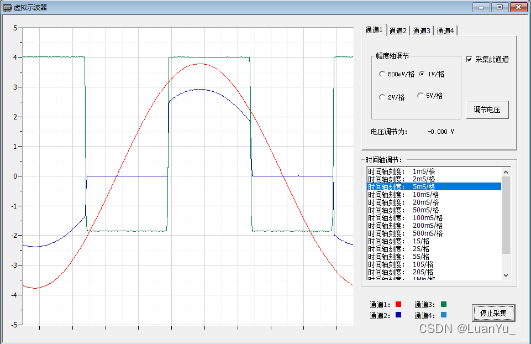
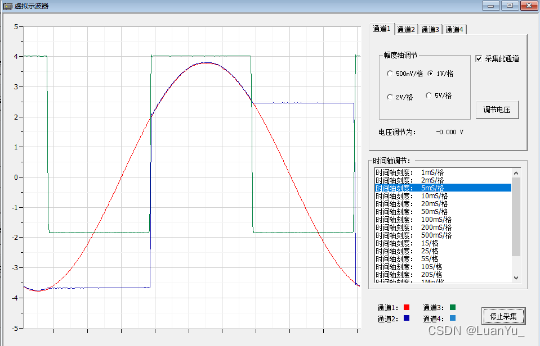
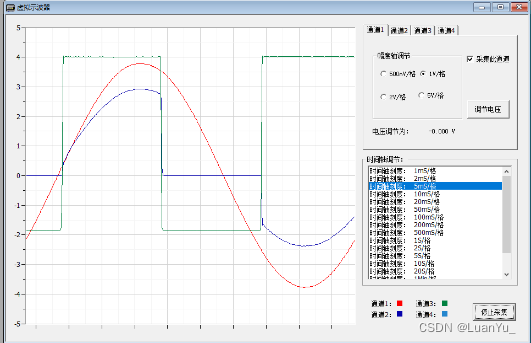
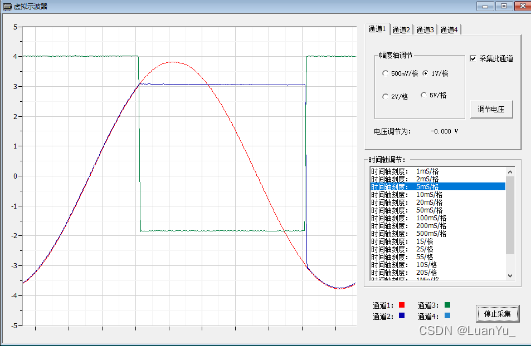
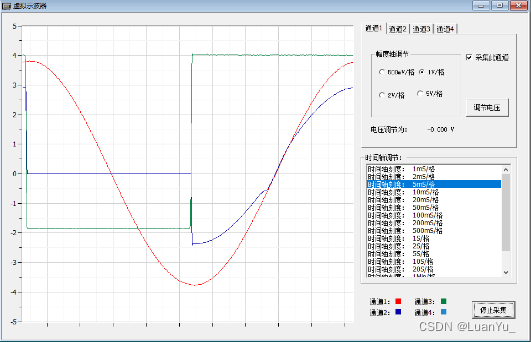
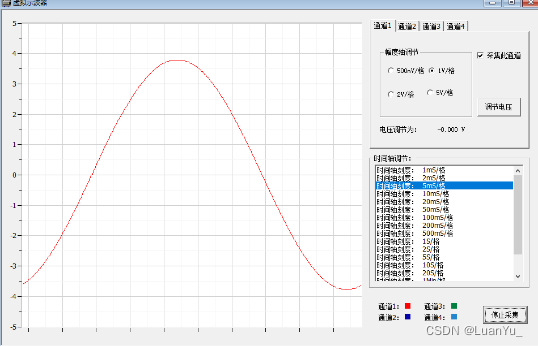
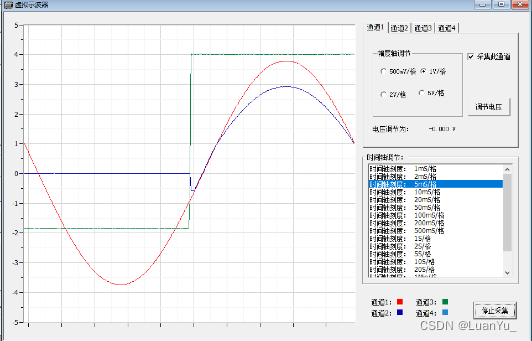
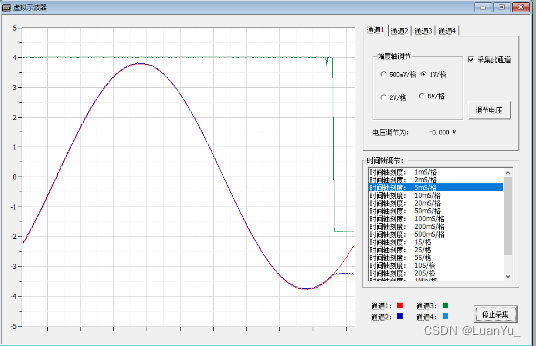
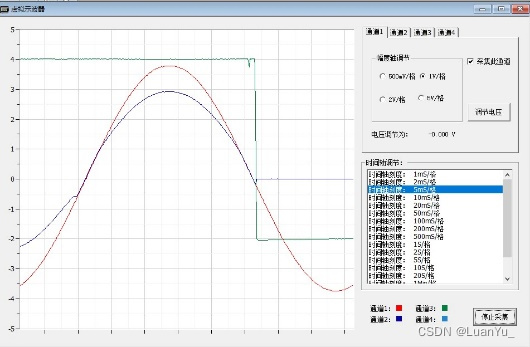
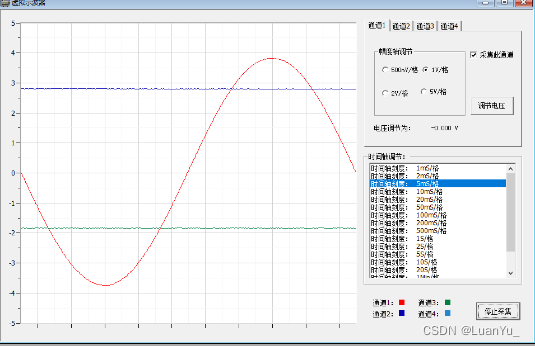
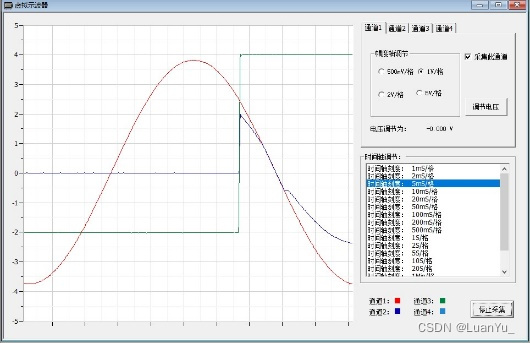
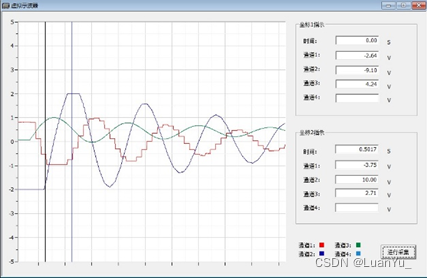
(2)原因分析
采样周期T越大,信号失真越严重。当采样信号频率符合采样定理,即频率大于等于40Hz,可以实现对信号的无失真采样。
当输入信号频率为采样信号频率整数倍时,即采样信号频率为10Hz,会出现隐匿振荡这种特殊情况,此时输入信号分量在采样信号中消失。
通过有无采样保持器的对比,发现采样保持可以有效地实现采样后离散信号对连续信号的追踪,不加保持作用,会导致离散信号与连续信号有较大的差距,使采样结果不准确。
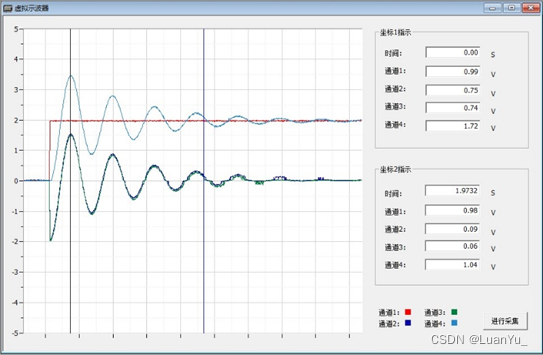
3.2 采样系统的动态性能分析
(1)实验数据
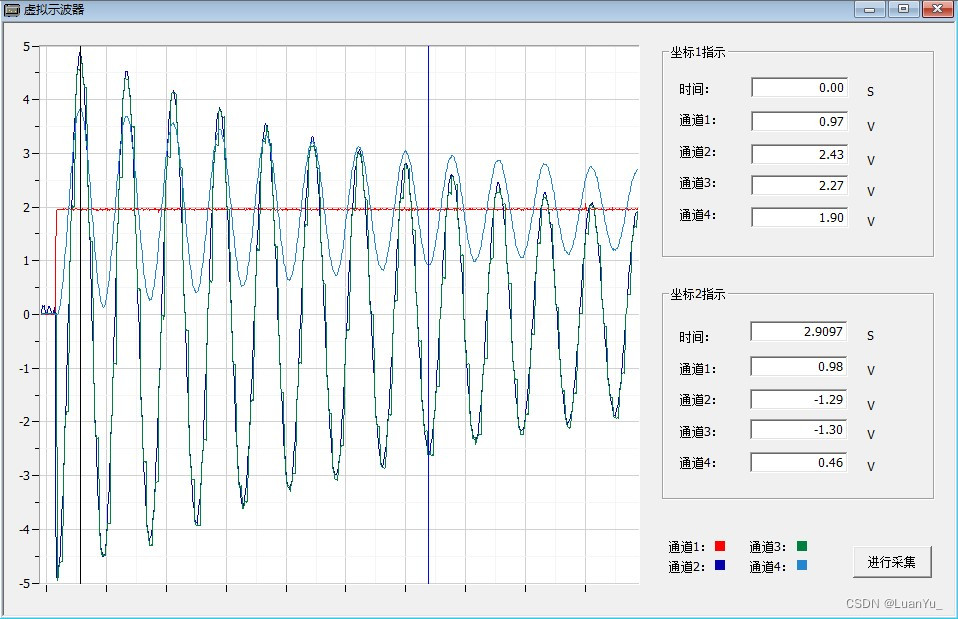
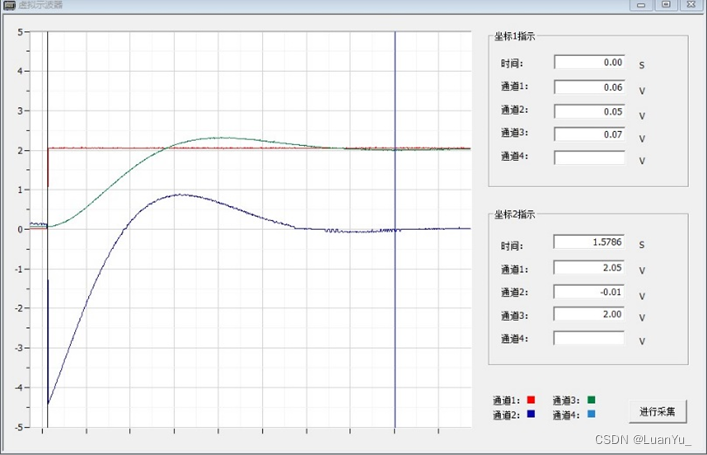
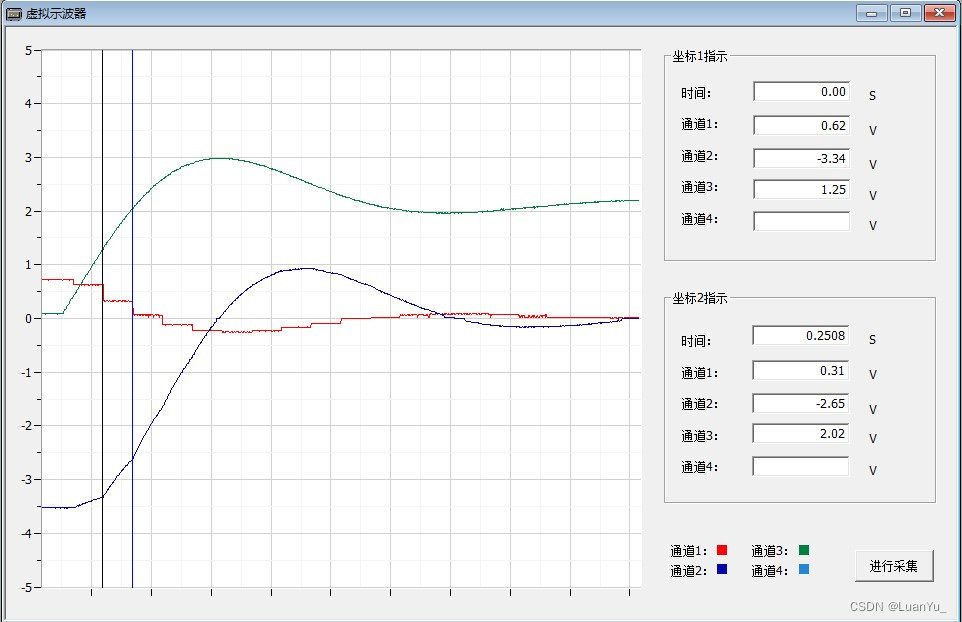
T=0.01s (100Hz)时;
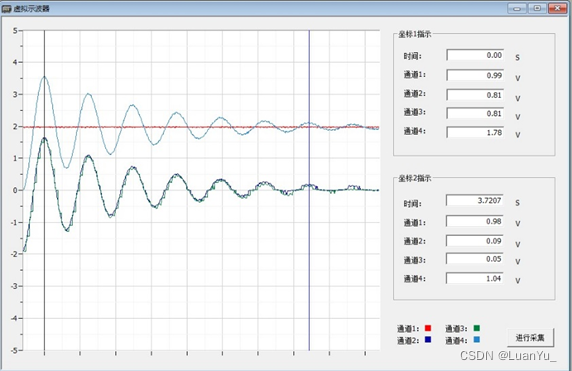
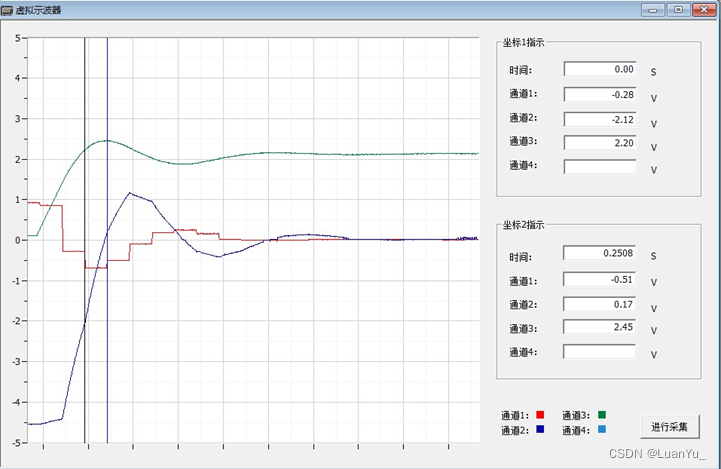
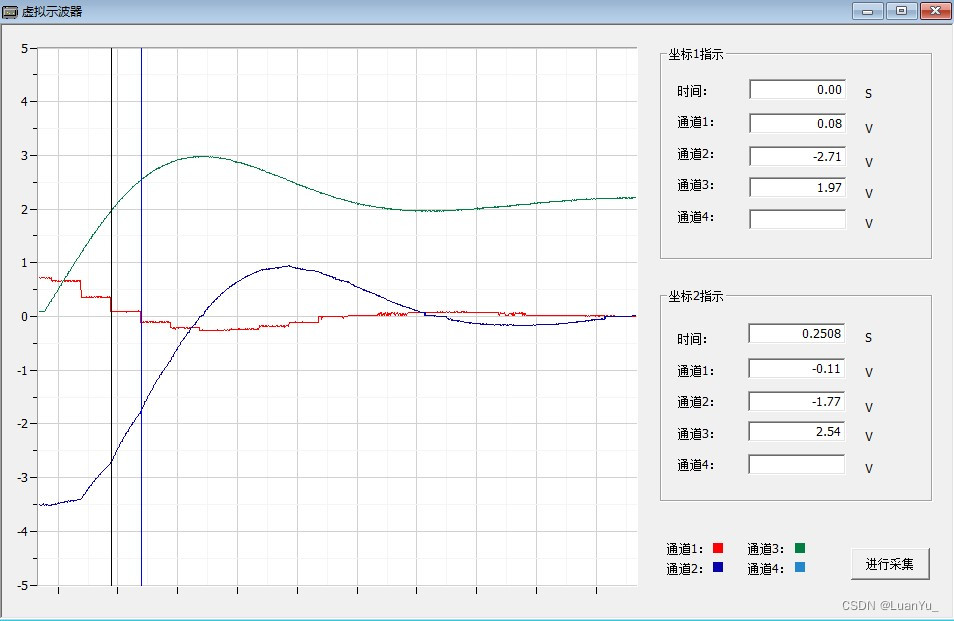
T=0.05s (20Hz)时;
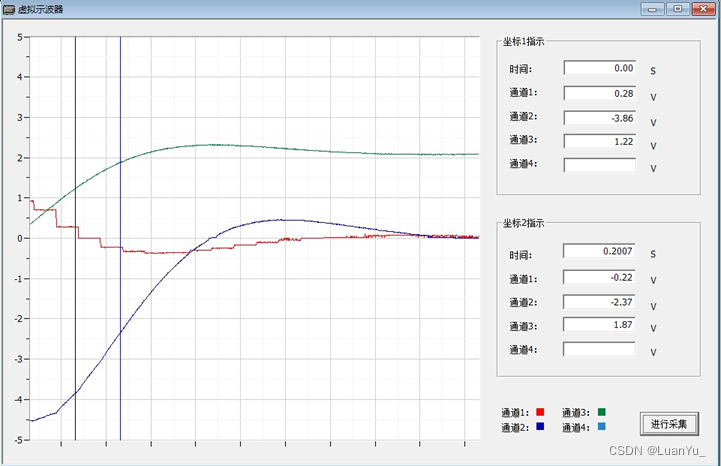
T= 0.2s (5Hz)时;
| 采样周期 | 稳定性 | 超调量 | 峰值时间 | 调节时间 | 稳态误差 |
| T=0.01s | 稳定 | 72% | 0.634s | 1.973s | 0.034 |
| T=0.05s | 稳定 | 78% | 0.975s | 3.721s | 0.067 |
| T=0.2s | 不稳定 | —— | —— | —— | —— |
(2)采样周期T对稳定性、动态性能及稳态误差的影响分析
采样周期 T(或采样频率)是计算机控制系统设计的重要参数之一。一般来说, 减小采样周期有利于控制系统性能, T越小,采样信号的信息损失越小,信号恢复精度越高。但是T过小会使控制系统调节过于频繁,使执行机构不能及时响应并加快其磨损,同时还会增加送算次数,使得计算机负担加重,同时还要求计算机有更高的运算速度。然而T过大,会使采样信号不能及时反映连续测量信号的基本变化规律,同时还会因为控制不及时致使控制系统动态品质恶化,甚至导致控制系统不稳定。 所以,应该合理选取采样周期T,尽可能地避免其过大戒过小。
当采样周期T增大时,则积分作用变强,微分作用变弱,会使系统的调节时间加长,而对干扰抑制会加强,静态误差会减小。如果减小采样周期T,微分作用将加强,而积分作用变弱,则整个系统的反应速度加快,调节时间缩短,而系统的抗干扰能力将会更差。当采样周期T超过临界时,会导致采样后系统不稳定。采样周期T对于系统的超调量、峰值时间影响不大,由于采样开关后存在采样保持作用,且被控系统包含足够的积分环节,因此系统稳态误差只与系统本身有关,与采样周期T无关。
3.3 临界状态T
改变信号发生器的频率,观察系统的单位阶跃响应,找到系统稳定的临界采样频率 f,记录临界的输出响应曲线(截取临界发散+临界收敛两张图,示波器和信号发生器参数同时保留在一张图中)。
(1)临界发散5.5Hz

(2)临界收敛5.7Hz
(3)理论与实际差异分析原因
根据临界发散与临界收敛图像分析,使系统稳定的临界采样频率5.6Hz,通过理论计算,系统理论临界采样频率为5.98Hz,实验结过于理论分析差异较小,引起误差原因可能为系统误差,总体来说实验成功。
3.4 R不同
要求:取采样周期 T=0.05s (20Hz),C1=1uF,R1=100k时,在输入端输入一个单位阶跃信号,在下面几种情况下用上位机软件(示波器)观测并记录 c(t)的输出响应曲线(在同一张图中记录对应的波形,示波器和信号发生器的参数同时保留在截图中)。性能指标:稳定性,超调量,峰值时间,调节时间,稳态误差(在示波器图中用移动坐标测量)记录在表中。
(1)当 R=100K 时;

(2)当 R=500K 时;

(3)当 R=800K 时;

| 采样周期 | 稳定性 | 超调量 | 峰值时间 | 调节时间 | 稳态误差 |
| R=100K | 稳定 | 65% | 0.664s | 2.667s | 0.051 |
| R=500K | 稳定 | 90% | 0.601s | 13.79s | 0.104 |
| R=800K | 不稳定 | —— | —— | —— | —— |
(4)分析放大系数 K 对稳定性、动态性能及稳态误差的影响
放大系数K增大时,系统稳定性下降,超调量增加,系统反应速度减慢,调节时间增加,当放大系数大于临界放大系数时,系统不稳定。放大系数K对系统峰值时间与稳态误差影响较小。
3.5 临界状态R
(1)临界发散R=627K

(2)临界收敛R=642K
(3)理论与实际差异原因分析
根据临界发散与临界收敛图像分析,使系统稳定的临界R值为634.5K,通过理论计算,系统理论临界采样频率为660.96K,实验结过于理论分析差异较小,引起误差原因可能为系统误差,实验成功。
实验八 离散化方法研究
一、实验完成任务
1.学习并掌握数字控制器的设计方法;
2.熟悉将模拟控制器 D(s)离散为数字控制器的原理与方法;
3.通过数模混合实验,对 D(s)的多种离散化方法作比较研究,并对 D(S)离散化前后闭环系统的性能进行比较,以加深对计算机控制系统的理解。
二、实验原理
离散化方法
(1)向前差分法
(2)向后差分法
(3)双线性变换法
(4)修正双线性变换
(5)阶跃响应不变法(或用脉冲响应法)
三、实验完成过程及结果
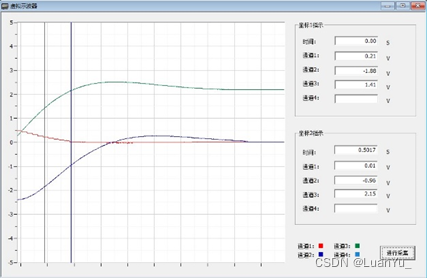
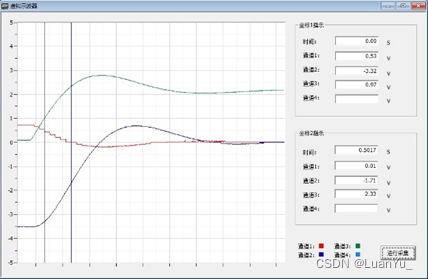
3.1 模拟控制系统测试

要求:按图连接二阶被控对象在加入模拟控制器(校正装置,参数见前文)后的模拟电路,并在其输入端用阶跃信号发生器输入2V的阶跃信号,观察并记录其响应曲线(在同一张图中记录对应的波形,示波器中各输入端的幅值比例要一致)。性能指标:稳定性,超调量,峰值时间,调节时间,稳态误差(在图中用移动坐标测量)记录在表中。
| 稳定性 | 超调量 | 峰值时间 | 调节时间 | 稳态误差 |
| 稳定 | 15% | 0.78s | 1.58s | 0.035 |
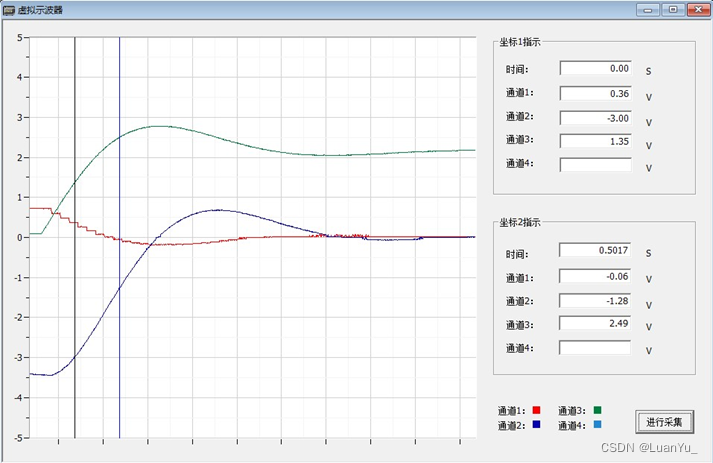
3.2 数字控制器测试
3.2.1 阶跃响应不变控制器
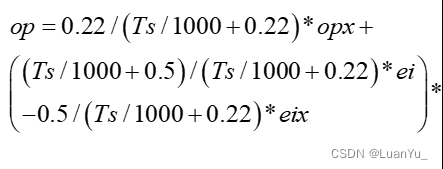
控制器公式:
![]()
(乘0.45表示缩小差分量,使系统更快稳定)
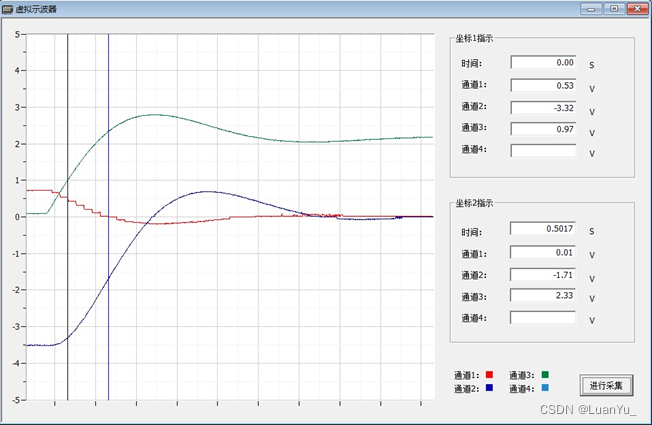
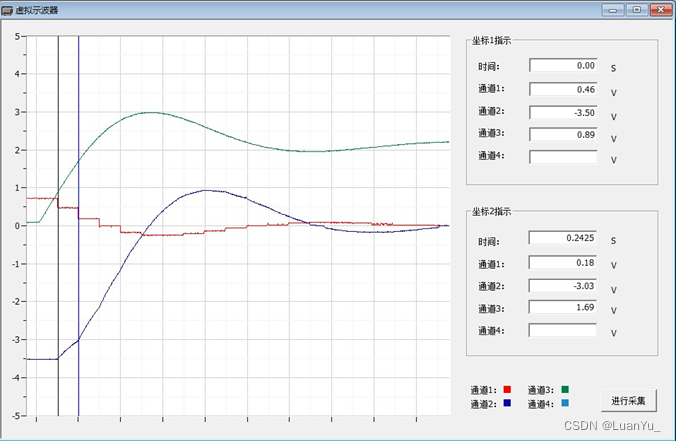
(1)T=0.1s
(2)T=0.25s
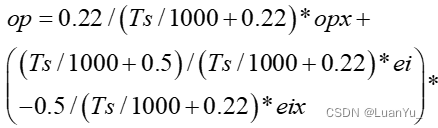
3.2.2后向差分法控制器的响应结果
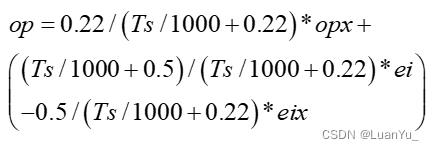
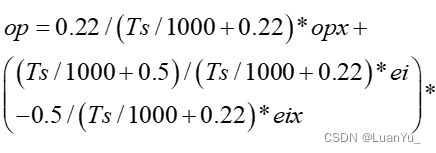
控制器公式:(乘0.15表示缩小差分量,使系统更快稳定)
![]()
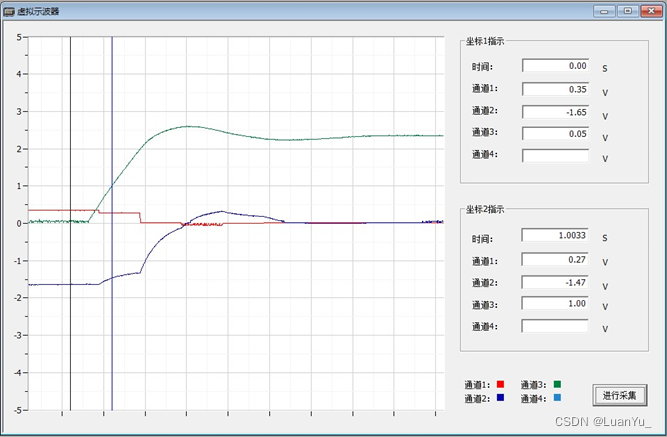
(1)T=0.1s
(2)T=0.25s
(3)T=1s
3.2.3 改变控制器公式差分量系数(T=0.1s)
|  |
|  |
|  |
| 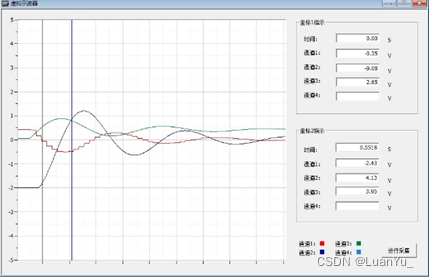 |
3.3 双线性变换控制器
控制器公式:(乘0.15表示缩小差分量,使系统更快稳定)

(1)T=0.1s
(2)T=0.25s
3.4 前向差分变换控制器
控制器公式:(乘0.15表示缩小差分量,使系统更快稳定)

(1)T=0.1s

(2)T=0.25s
(3)T=1s

3.5 分析
由图像对比可知,阶跃不变法、一阶向后差分法、一阶向前差分法和双线性变换法对系统的控制作用相差不大,与模拟连续控制系统结果接近。
当采样周期T增大时,离散后系统超调量增加,系统反应减慢,系统调节时间增加,系统稳定性下降。
当改变控制器公式差分量系数,得出当系数减小时,控制器对系统控制作用增强,系统稳定性增加,反应加快,调节时间减小。















 658
658











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









