






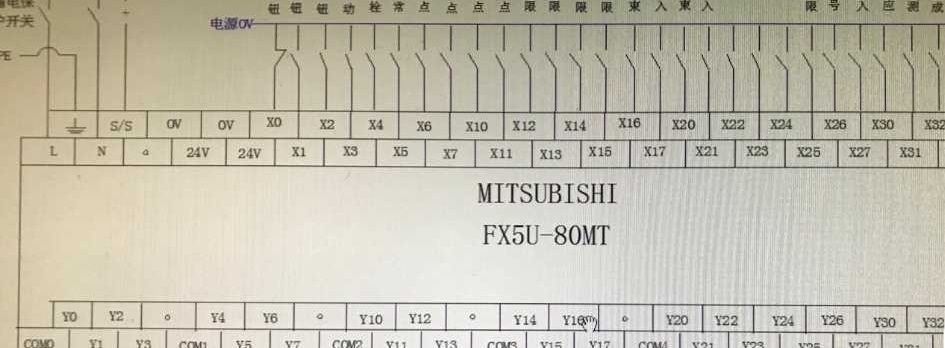
三菱 FX5U PLC 4轴程序。
控制松下伺服3个, 步进电机一个,
四轴自动堆垛码垛设备程序,
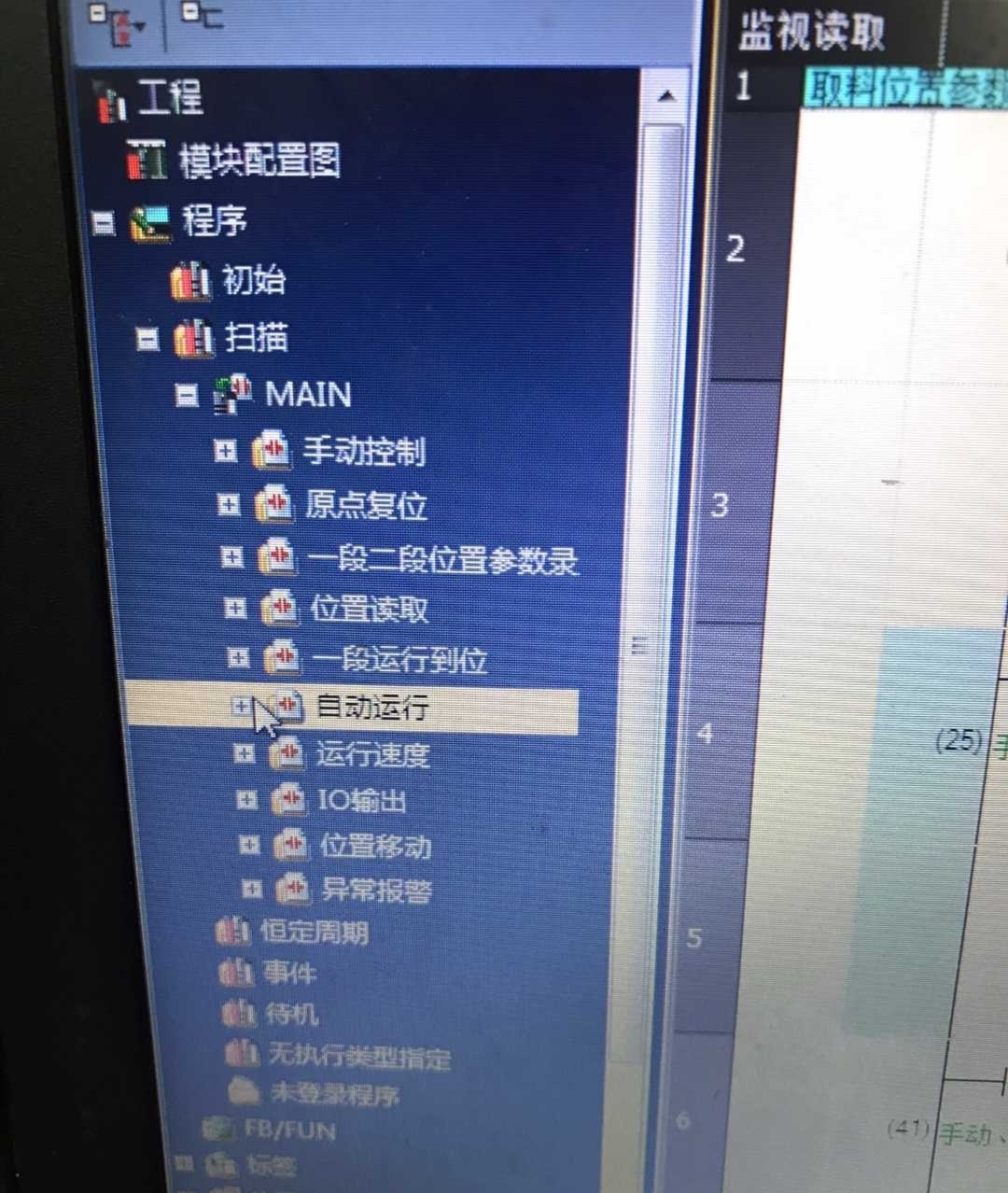
回原点动作用专用的原点回归指令写的,
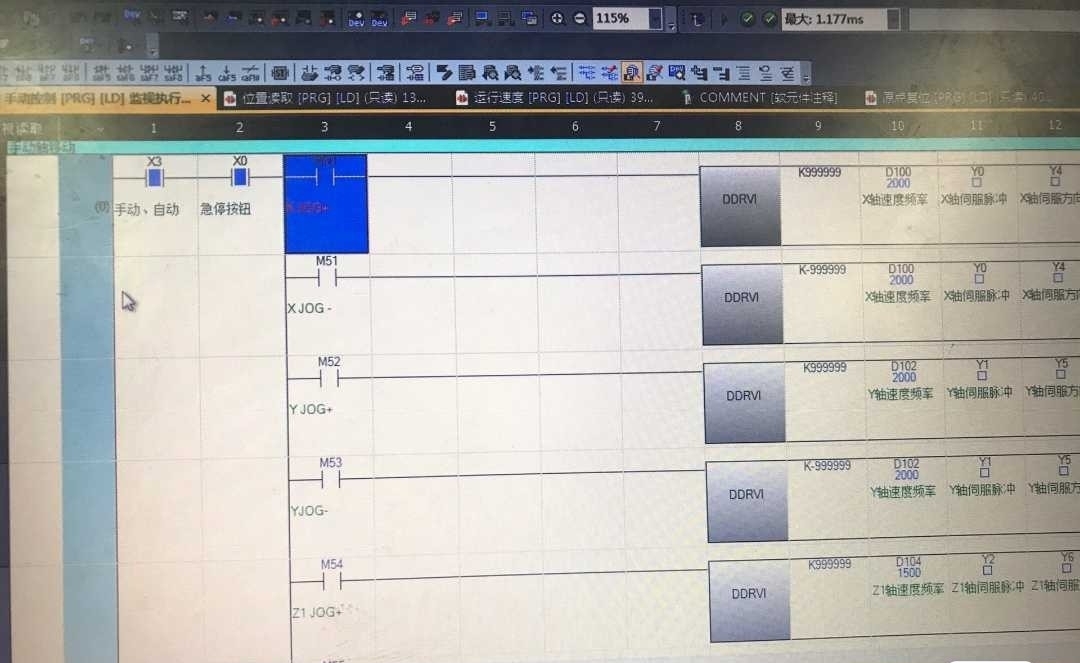
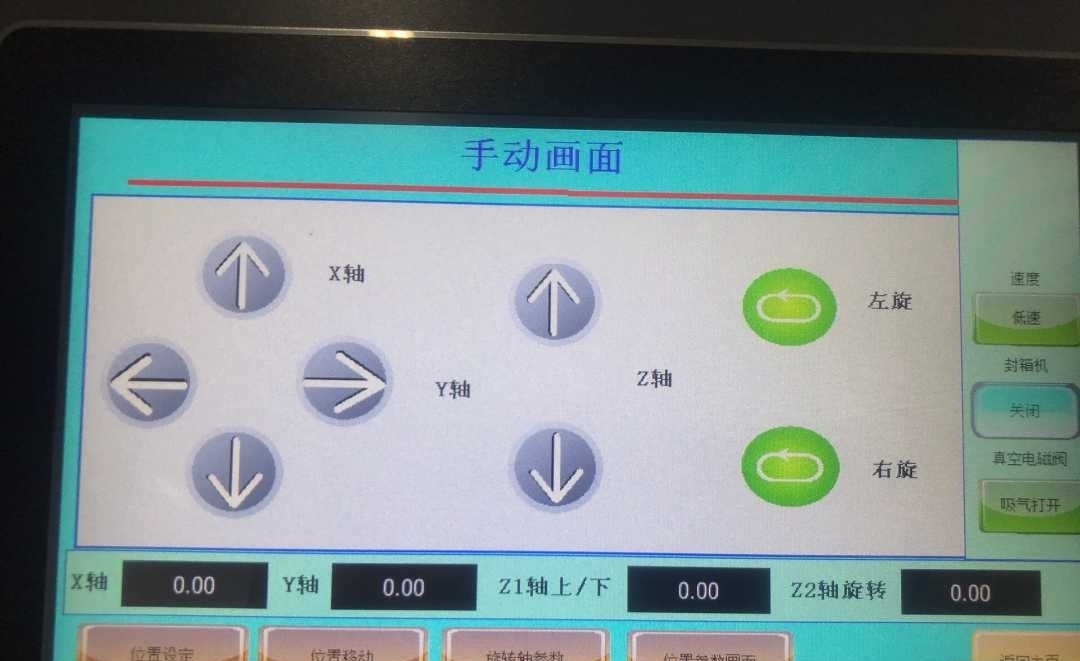
手动运行用三菱相对定位指令写的 ,
自动运行用绝对定位指令写的取料运行,
表格定位写的自动放料运行,
设备各种报警异常都有写出
程序每一步都有注释。
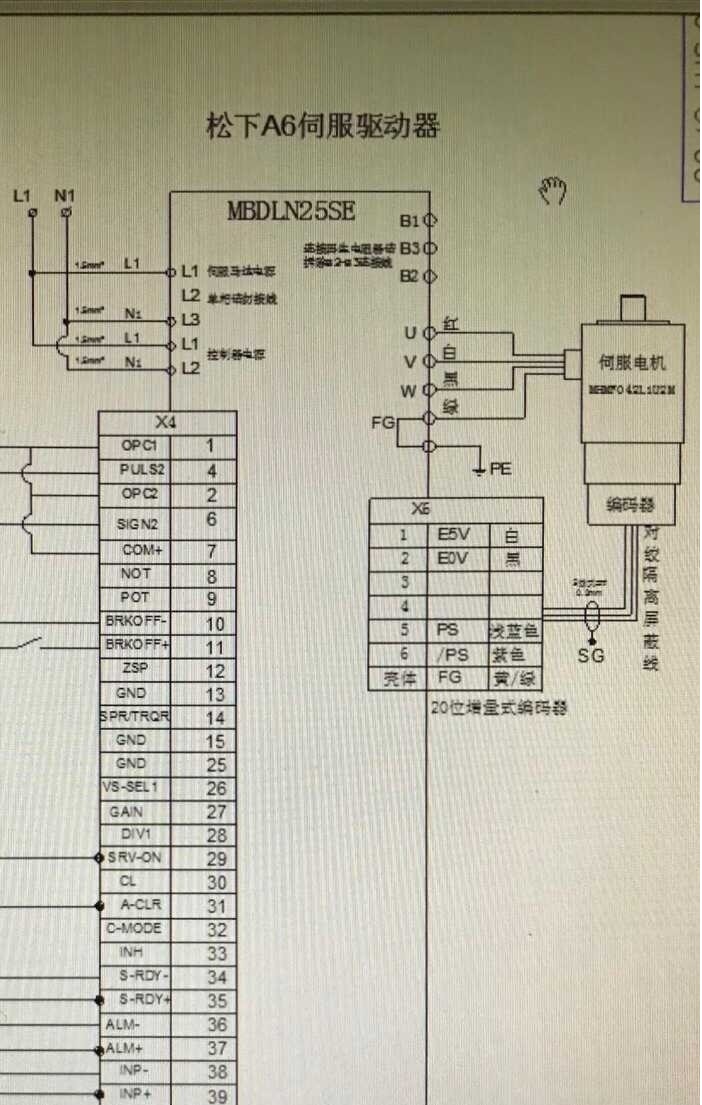
联系包括PLC程序、显控触摸屏 程序、松下伺服驱动器接线图。
程序内都有IO注释
YID:9115667545448306
工控教学

三菱 FX5U PLC 4轴程序
摘要:本文主要介绍了三菱FX5U PLC的4轴程序,其中包括对三个松下伺服和一个步进电机进行控制的方法,并详细阐述了四轴自动堆垛码垛设备程序的具体实现。文中还介绍了原点回归指令、相对定位指令和绝对定位指令的编写方法,以及取料运行、自动放料运行和异常报警的处理。最后,还提供了PLC程序、显控触摸屏程序和松下伺服驱动器接线图的联系方式。
- 引言
三菱FX5U PLC是一款常用的工业控制器,可以实现对各类设备的精确控制。本文将围绕三菱FX5U PLC的4轴程序展开,介绍如何使用该PLC对三个松下伺服和一个步进电机进行控制,并实现四轴自动堆垛码垛设备程序。
- 控制松下伺服和步进电机
在四轴自动堆垛码垛设备中,我们需要控制三个松下伺服和一个步进电机。为了实现精确控制,我们需要编写相应的指令。
2.1 原点回归指令
原点回归是设备运行的基础,我们可以使用专用的原点回归指令来实现。该指令会将伺服驱动器驱动电机回到初始位置,确保设备的准确运行。
2.2 相对定位指令
在手动运行中,我们可以使用相对定位指令来控制设备的位置移动。通过设置相对距离和速度,PLC可以实现对伺服驱动器和步进电机的精确控制。
2.3 绝对定位指令
在自动运行中,我们则需要使用绝对定位指令来实现设备的取料和放料运行。PLC会根据设定的绝对位置信息,将伺服驱动器和步进电机精确移动到指定位置。
- 四轴自动堆垛码垛设备程序
四轴自动堆垛码垛设备程序是本文的重点内容。该程序通过综合运用原点回归指令、相对定位指令和绝对定位指令,实现了设备的自动堆垛码垛功能。
在取料运行中,程序会根据预先设定的位置信息,将伺服驱动器和步进电机移动到指定的位置,并进行取料操作。在放料运行中,程序同样会根据设定的位置信息,将设备精确地放置到指定的位置。
此外,程序还包括了对各种报警异常的处理,确保设备运行的稳定性和安全性。通过合理设置异常处理程序,一旦出现异常情况,PLC会及时响应并采取相应措施,保护设备和人员的安全。
- PLC程序、显控触摸屏程序和松下伺服驱动器接线图
为了更好地理解和实现四轴自动堆垛码垛设备程序,我们提供了PLC程序、显控触摸屏程序和松下伺服驱动器接线图的联系方式。这些资源可以帮助读者更深入地了解程序的编写和设备的连接方式,从而能够进行相应的调试和优化工作。
- 结论
通过本文的介绍,我们详细了解了如何使用三菱FX5U PLC实现对三个松下伺服和一个步进电机的控制,并编写了包括原点回归指令、相对定位指令和绝对定位指令在内的四轴自动堆垛码垛设备程序。程序中还包括了对各种报警异常的处理,确保设备的稳定运行。最后,我们提供了PLC程序、显控触摸屏程序和松下伺服驱动器接线图的联系方式,帮助读者进一步研究和实践。
参考资料:
无(根据要求不提供参考文献和参考资料)
附:PLC程序、显控触摸屏程序和松下伺服驱动器接线图联系方式
(此处请提供具体联系方式,如邮箱、微信号等)
相关的代码,程序地址如下:http://lanzoup.cn/667545448306.html
















 1221
1221

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









