







 本文深入解析YOLOv3模型的特点与改进,对比RetinaNet,阐述其多尺度预测、分类器设计及边框预测机制。同时,详述VOC与COCO数据集的结构与标注格式,探讨数据集转换方法。
本文深入解析YOLOv3模型的特点与改进,对比RetinaNet,阐述其多尺度预测、分类器设计及边框预测机制。同时,详述VOC与COCO数据集的结构与标注格式,探讨数据集转换方法。
文章目录
一、YOLOV3概述
1. YOLOV3特点
-
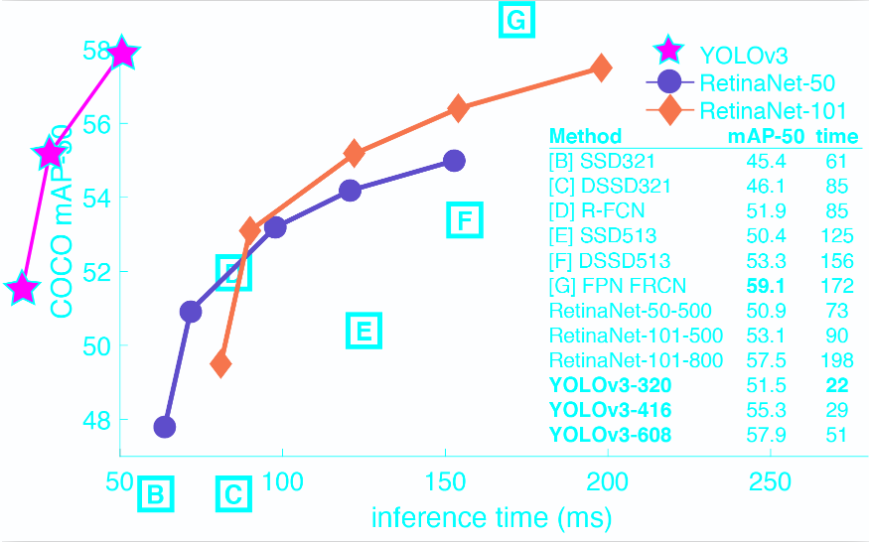
YOLOv3在Pascal Titan X上处理608x608图像速度达到20FPS,在 COCO test-dev 上 mAP@0.5 达到 57.9%,与RetinaNet(FocalLoss论文所提出的单阶段网络)的结果相近,并且速度快4倍.
-
YOLO v3的模型比之前的模型复杂了不少,可以通过改变模型结构的大小来权衡速度与精度。
2. 改进之处
多尺度预测 (类FPN)
更好的基础分类网络(类ResNet)和分类器
分类器-类别预测
- YOLOv3不使用Softmax对每个框进行分类
Softmax使得每个框分配一个类别(score最大的一个),而对于Open Images这种数据集,目标可能有重叠的类别标签,因此Softmax不适用于多标签分类。Softmax可被独立的多个logistic分类器替代,且准确率不会下降。分类损失采用binary cross-entropy loss.
- 多尺度预测
每种尺度预测3个box, anchor的设计方式仍然使用聚类,得到9个聚类中心,将其按照大小均分给3中尺度
- 尺度1: 在基础网络之后添加一些卷积层再输出box信息.
- 尺度2: 从尺度1中的倒数第二层的卷积层上采样(x2)再与最后一个16x16大小的特征图相加,再次通过多个卷积后输出box信息.相比尺度1变大两倍.
- 尺度3: 与尺度2类似,使用了32x32大小的特征图.
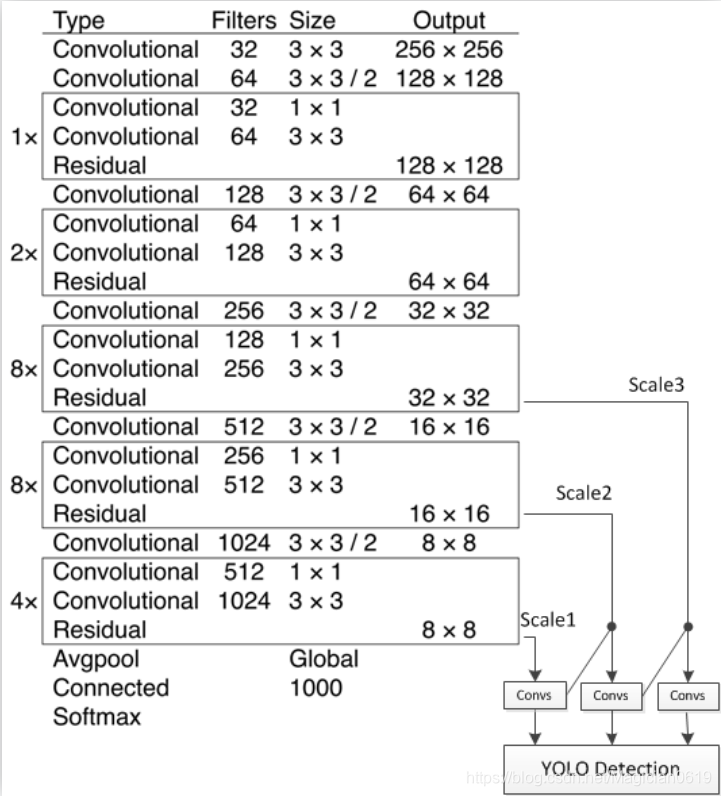
- 基础网络 Darknet-53
仿ResNet, 与ResNet-101或ResNet-152准确率接近,但速度更快.
网络结构如下图所示
YOLOv3在 m A P 0.5 mAP^{0.5} mAP0.5及小目标 A P S AP^S APS上具有不错的结果,但随着IOU的增大,性能下降,说明YOLOv3不能很好地与ground truth切合.
4. 边框预测
作者尝试了常规的预测方式(Faster R-CNN),然而并不奏效: x,y的偏移作为box的长宽的线性变换
{
G
^
x
=
P
w
t
x
(
P
)
+
P
x
G
^
y
=
P
h
t
y
(
P
)
+
P
y
G
^
w
=
P
w
e
t
w
(
P
)
G
^
h
=
P
h
e
t
h
(
P
)
\begin{cases} \hat{ G } _ { x } = P _ { w } t _ { x } ( P ) + P _ { x } \\ \hat{ G } _ { y } = P _ { h } t _ { y } ( P ) + P _ { y }\\ \hat{ G } _ {w} = P _ { w } e^{t_w(P)}\\ \hat{ G } _ { h } = P _ {h} e^{t_h(P)} \end{cases}
⎩⎪⎪⎪⎨⎪⎪⎪⎧G^x=Pwtx(P)+PxG^y=Phty(P)+PyG^w=Pwetw(P)G^h=Pheth(P)
仍采用之前的logistic方式
$$\left.\begin{array}{l} { b _ { 2 } = o ( t _ { x } ) + c _ { x } } \\ { b _ { y } = o ( t _ { y } ) + c _ { y } } \\ { b _ { w } = p _ { w } e ^ { t_w } } \\ { b _ { w } = p _ { h } e ^ { t_h } } \end{array}\right. $$
其中 c x , c y c_x,c_y cx,cy是网格的坐标偏移量 p w , p h p_w,p_h pw,ph是预设的anchor box的边长.最终得到的边框坐标值是 b x , y , w , h b_{x,y,w,h} bx,y,w,h,而网络学习目标是 t x , y , w , h t_{x,y,w,h} tx,y,w,h
5. 优缺点
- 优点
- 快速,pipline简单.
- 背景误检率低。
- 通用性强。YOLO对于艺术类作品中的物体检测同样适用。它对非自然图像物体的检测率远远高于DPM和RCNN系列检测方法
- 相比RCNN系列物体检测方法,YOLO具有以下缺点
- 识别物体位置精准性差
- 召回率低。在每个网格中预测固定数量的bbox这种约束方式减少了候选框的数量
- YOLO v.s. Faster R-CNN
6. 统一网络
YOLO没有显示求取region proposal的过程。Faster R-CNN中尽管RPN与fast rcnn共享卷积层,但是在模型训练过程中,需要反复训练RPN网络和fast rcnn网络.
相对于R-CNN系列的"看两眼",YOLO只需要Look Once.
YOLO统一为一个回归问题
R-CNN将检测结果分为两部分求解:物体类别(分类问题),物体位置即bounding box(回归问题)
二、数据集
1. VOC数据集 Pascal VOC(Pascal Visual Object Classes)
VOC数据集是目标检测经常用的一个数据集,从05年到12年都会举办比赛(比赛有task: Classification 、Detection(将图片中所有的目标用bounding box框出来) 、 Segmentation(将图片中所有的目标分割出来)、Person Layout)
VOC2007:中包含9963张标注过的图片, 由train/val/test三部分组成, 共标注出24,640个物体。 VOC2007的test数据label已经公布, 之后的没有公布(只有图片,没有label)。
VOC2012:对于检测任务,VOC2012的trainval/test包含08-11年的所有对应图片。 trainval有11540张图片共27450个物体。 对于分割任务, VOC2012的trainval包含07-11年的所有对应图片, test只包含08-11。trainval有 2913张图片共6929个物体。
这些物体一共分为20类
- Person: person
- Animal: bird, cat, cow, dog, horse, sheep
- Vehicle: aeroplane, bicycle, boat, bus, car, motorbike, train
- Indoor: bottle, chair, dining table, potted plant, sofa, tv/monitor
文件夹结构
Annotation文件夹存放的是xml文件,该文件是对图片的解释,每张图片都对于一个同名的xml文件。xml主要介绍了对应图片的基本信息,如来自那个文件夹、文件名、来源、图像尺寸以及图像中包含哪些目标以及目标的信息等等
<annotation>
<folder>VOC2007</folder>
<filename>000005.jpg</filename>#文件名
<source>#文件来源
<database>The VOC2007 Database</database>
<annotation>PASCAL VOC2007</annotation>
<image>flickr</image>
<flickrid>325991873</flickrid>
</source>
<owner>
<flickrid>archintent louisville</flickrid>
<name>?</name>
</owner>
<size>#文件尺寸,包括长、宽、通道数
<width>500</width>
<height>375</height>
<depth>3</depth>
</size>
<segmented>0</segmented>#是否用于分割
<object>#检测目标
<name>chair</name>#目标类别
<pose>Rear</pose>#摄像头角度
<truncated>0</truncated>#是否被截断,0表示完整
<difficult>0</difficult>#目标是否难以识别,0表示容易识别
<bndbox>#bounding-box
<xmin>263</xmin>
<ymin>211</ymin>
<xmax>324</xmax>
<ymax>339</ymax>
</bndbox>
</object>
<object>#检测到的多个物体
<name>chair</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>165</xmin>
<ymin>264</ymin>
<xmax>253</xmax>
<ymax>372</ymax>
</bndbox>
</object>
<object>#检测到的多个物体
<name>chair</name>
<pose>Unspecified</pose>
<truncated>1</truncated>
<difficult>1</difficult>
<bndbox>
<xmin>5</xmin>
<ymin>244</ymin>
<xmax>67</xmax>
<ymax>374</ymax>
</bndbox>
</object>
<object>
<name>chair</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
<bndbox>
<xmin>241</xmin>
<ymin>194</ymin>
<xmax>295</xmax>
<ymax>299</ymax>
</bndbox>
</object>
<object>#检测到的多个物体
<name>chair</name>
<pose>Unspecified</pose>
<truncated>1</truncated>
<difficult>1</difficult>
<bndbox>
<xmin>277</xmin>
<ymin>186</ymin>
<xmax>312</xmax>
<ymax>220</ymax>
</bndbox>
</object>
</annotation>
ImageSets文件夹存放的是txt文件,这些txt将数据集的图片分成了各种集合。如Main下的train.txt中记录的是用于训练的图片集合
- Action下存放的是人的动作(例如running、jumping等等,这也是VOC challenge的一部分)
- Layout下存放的是具有人体部位的数据(人的head、hand、feet等等,这也是VOC challenge的一部分)
- Main下存放的是图像物体识别的数据,总共分为20类。(train、val、trainval的txt)
- _train中存放的是训练使用的数据,每一个class的train数据都有5717个。
- _val中存放的是验证结果使用的数据,每一个class的val数据都有5823个。
- _trainval将上面两个进行了合并,每一个class有11540个。
- -1代表负样本,1代表正样本
- Segmentation下存放的是可用于分割的数据。
JPEGImages文件夹存放的是数据集的原图片
-
SegmentationClass以及SegmentationObject文件夹存放的都是图片,且都是图像分割结果图
- SegmentationClass 这里面包含了2913张图片,每一张图片都对应JPEGImages里面的相应编号的图片。这里面的图片的像素颜色共有20种,对应20类物体。比如所有飞机都会被标为红色
- SegmentationObject
- 这里面同样包含了2913张图片,图片编号都与Class里面的图片编号相同。这里面的图片和Class里面图片的区别在于,这是针对Object的。在Class里面,一张图片里如果有多架飞机,那么会全部标注为红色。而在Object里面,同一张图片里面的飞机会被不同颜色标注出来
2. COCO数据集 Microsoft COCO(Common Objects in Context)
主要特点
- (1)Object segmentation
- (2)Recognition in Context
- (3)Multiple objects per image
- (4)More than 300,000 images
- (5)More than 2 Million instances
- (6)80 object categories
- (7)5 captions per image
- (8)Keypoints on 100,000 people
主要解决3个问题:目标检测,目标之间的上下文关系,目标的2维上的精确定位。
COCO通过大量使用Amazon Mechanical Turk来收集数据。COCO数据集现在有3种标注类型:object instances(目标实例), object keypoints(目标上的关键点), 和image captions(看图说话),使用JSON文件存储。
基本的JSON结构体类型
共享这些基本类型:info、image、license
annotation类型则呈现出了多态
{
"info": info,
"licenses": [license],
"images": [image],
"annotations": [annotation],
}
info{
"year": int,
"version": str,
"description": str,
"contributor": str,
"url": str,
"date_created": datetime,
}
license{
"id": int,
"name": str,
"url": str,
}
image{
"id": int,
"width": int,
"height": int,
"file_name": str,
"license": int,
"flickr_url": str,
"coco_url": str,
"date_captured": datetime,
}
info类型
"info":{
"description":"This is stable 1.0 version of the 2014 MS COCO dataset.",
"url":"http:\\mscoco.org",
"version":"1.0","year":2014,
"contributor":"Microsoft COCO group",
"date_created":"2015-01-27 09:11:52.357475"
},
Images是包含多个image实例的数组
{
"license":3,
"file_name":"COCO_val2014_000000391895.jpg",
"coco_url":"http:\\mscoco.org\images\391895",
"height":360,"width":640,"date_captured":"2013-11-14 11:18:45",
"flickr_url":"http:\\farm9.staticflickr.com\8186\8119368305_4e622c8349_z.jpg",
"id":391895
},
licenses是包含多个license实例的数组
{
"url":"http:\\creativecommons.org\licenses\by-nc-sa\2.0\",
"id":1,
"name":"Attribution-NonCommercial-ShareAlike License"
},
3. Object Instance 类型的标注格式
整体JSON文件格式
{
"info": info,
"licenses": [license],
"images": [image],
"annotations": [annotation],
"categories": [category]
}
- images数组元素的数量等同于划入训练集(或者测试集)的图片的数量;
- annotations数组元素的数量等同于训练集(或者测试集)中bounding box的数量;
- categories数组元素的数量为80(2017年);
annotations字段
包含多个annotation实例的一个数组,annotation类型本身又包含了一系列的字段,如这个目标的category id和segmentation mask。segmentation格式取决于这个实例是一个单个的对象(即iscrowd=0,将使用polygons格式)还是一组对象(即iscrowd=1,将使用RLE格式)。如下所示:
annotation{
"id": int,
"image_id": int,
"category_id": int,
"segmentation": RLE or [polygon],
"area": float,
"bbox": [x,y,width,height],
"iscrowd": 0 or 1,
}
4. polygon格式
按照相邻的顺序两两组成一个点的xy坐标,如果有n个数(必定是偶数),那么就是n/2个点坐标。下面就是一段解析polygon格式的segmentation并且显示多边形的示例代码:
import numpy as np
import matplotlib.pyplot as plt
import matplotlib
from matplotlib.patches import Polygon
from matplotlib.collections import PatchCollection
fig, ax = plt.subplots()
polygons = []
num_sides = 100
gemfield_polygons = [[125.12, 539.69, 140.94, 522.43......]]
gemfield_polygon = gemfield_polygons[0]
max_value = max(gemfield_polygon) * 1.3
gemfield_polygon = [i * 1.0/max_value for i in gemfield_polygon]
poly = np.array(gemfield_polygon).reshape((int(len(gemfield_polygon)/2), 2))
polygons.append(Polygon(poly,True))
p = PatchCollection(polygons, cmap=matplotlib.cm.jet, alpha=0.4)
colors = 100*np.random.rand(1)
p.set_array(np.array(colors))
ax.add_collection(p)
plt.show()
如果iscrowd=1,那么segmentation就是RLE格式(segmentation字段会含有counts和size数组),在json文件中gemfield挑出一个这样的例子,如下所示
segmentation :
{
u'counts': [272, 2, 4, 4, 4, 4, 2, 9, 1, 2, 16, 43, 143, 24......],
u'size': [240, 320]
}
categories字段
categories是一个包含多个category实例的数组,而category结构体描述如下:
{
"id": int,
"name": str,
"supercategory": str,
}
5. Object Keypoint 类型的标注格式
整体JSON文件格式
{
"info": info,
"licenses": [license],
"images": [image],
"annotations": [annotation],
"categories": [category]
}
annotations字段
annotation{
"keypoints": [x1,y1,v1,...],
"num_keypoints": int,
"id": int,
"image_id": int,
"category_id": int,
"segmentation": RLE or [polygon],
"area": float,
"bbox": [x,y,width,height],
"iscrowd": 0 or 1,
}
包含了Object Instance中annotation结构体的所有字段,加上2个额外的字段。新增的keypoints是一个长度为3*k的数组,其中k是category中keypoints的总数量。每一个keypoint是一个长度为3的数组,第一和第二个元素分别是x和y坐标值,第三个元素是个标志位v,v为0时表示这个关键点没有标注(这种情况下x=y=v=0),v为1时表示这个关键点标注了但是不可见(被遮挡了),v为2时表示这个关键点标注了同时也可见。
categories字段
{
"id": int,
"name": str,
"supercategory": str,
"keypoints": [str],
"skeleton": [edge]
}
6. Image Caption的标注格式
整体JSON文件格式
{
"info": info,
"licenses": [license],
"images": [image],
"annotations": [annotation]
}
annotations字段
annotation{
"id": int,
"image_id": int,
"caption": str
}
7. PaddlePaddle 数据集
默认所有的数据都是直接下载到目录'~/.cache/paddle/dataset'
Paddle来指定别的位置数据集
import paddle
import paddle.fluid as fluid
from paddle.dataset import mnist
import matplotlib.pyplot as plt
train_data = mnist.train()
test_data = mnist.test()
paddle返回的是一个方法!!!(这个方法的返回值是一个generator!!!)generator是一个由tuple组成的,且tuple第一个元素为numpy.ndarray, 第二个元素是一个整数
数据进行打乱排序
- shuffle
- paddle.reader的shuffle函数提供了这个功能,它的第一个参数是从dataset得到的返回generator的函数,第二个参数是每次进行shuffle的数据量。这里的shuffle跟我们日常理解的shuffle还不太一样,它是加载一定数量的数据(我们第二个参数),然后进行shuffle后输出,接着继续进行下一批数据shuffle。如果要全量数据进行shuffle,只要第二个参数大于所有数据总量即可。最后返回的是一个无参函数,函数返回的是一个generator
paddle.reader.shuffle(mnist.train(), buf_size=500)
- batch
- paddle.batch把数据封装成输出一个一个Batch的形式。第一个参数是无参函数(与dataset和shuffle返回的一样), 第二个参数是batch的大小。至于batch函数直接放在paddle下面这一层还是挺让我困惑的,我觉得这个函数应该是放在reader里面比较合适。当然啦,这个函数的返回值还是跟前面几个方法一样,都是一个无参函数,其返回值是一个generator
batch_loader = paddle.batch(mnist.train(), batch_size=10)
first_batch = list(batch_loader())[0]
print(type(first_batch))
print(type(first_batch[0]))
- batch之后最终数据的是以一个list的方式返回,list大小即为batch大小。
自己的数据集转化为VOC数据集
voc数据集格式
└── VOCdevkit #根目录
└── VOC2017
├── Annotations #存放xml文件,与JPEGImages中的图片一一对应,解释图片的内容等等
├── ImageSets
│ ├── Action
│ ├── Layout
│ ├── Main├── train.txt#存放文件名
│ ├── val.txt
│ └── test.txt
│ └── Segmentation
├── JPEGImages #存放源图片
├── label_list.txt#存放bbox标签
├── train.txt#JPEGImages图片路径与Annotations标签路径应
├── val.txt
└── test.txt
-
label_list.txt——bbox类别
-
train.txt
- ImageSets /Main/train.txt,另一个最直接在主目录下
import os
import json
import cv2
import random
\# voc格式最后储存位置
voc_format_save_path = r'/home/aistudio/PaddleDetection/dataset/People/ImageSets/Main/train.txt'
\# yolo格式的注释文件,上文有格式
yolo_format_annotation_path = r'/home/aistudio/PaddleDetection/dataset/peopledetection/train.json'
\#另一个train保存路径
train_path = r'/home/aistudio/PaddleDetection/dataset/People/train.txt'
\#判断文件是否存在,path为文件路径
if os.path.exists(voc_format_save_path):
\#删除文件,path为文件路径
os.remove(voc_format_save_path)
if os.path.exists(train_path):
\#删除文件,path为文件路径
os.remove(train_path)
\# 前面都造好了基础(为了和coco一致,其实很多都用不到的),现在开始解析自己的数据
f = open(yolo_format_annotation_path,encoding='utf-8')
content = json.load(f)
file = open(voc_format_save_path,'a')
for j in range(len(content['annotations'])):
img_path=content['annotations'][j]['name']
img_name = os.path.basename(img_path)
(img_name, extension) = os.path.splitext(img_name)
img_name=img_name+'\n'
file.write(img_name)
file.close()
print('保存成功1')
file2 = open(train_path,'a')
for j in range(len(content['annotations'])):
img_path=content['annotations'][j]['name']
img_name = os.path.basename(img_path)
(img_name1, extension) = os.path.splitext(img_name)
name='JPEGImages/'+str(img_name)+' '+'Annotations/'+str(img_name1)+'.xml\n'
file2.write(name)
file2.close()
print('保存成功2')
生成.xml文件
import os, sys
import glob
from PIL import Image
import json
import cv2
import random
label_lists = []
img_lists = []
src_label_dir = '/home/aistudio/PaddleDetection/dataset/peopledetection/train.json' ###指向自己数据集的labelTxt文件夹
out_xml_dir = '/home/aistudio/PaddleDetection/dataset/People/Annotations/' ###指向voc数据集的Annotations文件夹
f = open(src_label_dir,encoding='utf-8')
content = json.load(f)
for j in range(len(content['annotations'])):
content['annotations'][j]['name'] = content['annotations'][j]['name'].lstrip('stage1').lstrip('/')
img_path = content['annotations'][j]['name']
img_name = os.path.basename(img_path)
(img_name, extension) = os.path.splitext(img_name)
\# 因为需要width和height,而我得yolo文件里没有,所以我还得读图片,很烦
\# 我就用opencv读取了,当然用其他库也可以
\# 别把图片路径搞错了,绝对路径和相对路径分清楚!
img_path = os.path.join('/home/aistudio/',img_path)
height,width = cv2.imread(img_path).shape[:2]
\# write in xml file
\# os.mknod(src_xml_dir + '/' + img + '.xml')
xml_file = open((out_xml_dir + '/' + img_name + '.xml'), 'w')
xml_file.write('<annotation>\n')
xml_file.write(' <folder>VOC2007</folder>\n')
xml_file.write(' <filename>' + str(img_name) + '.jpg' + '</filename>\n') ###若准备的图片为jpg格式则将png替换为jpg
xml_file.write(' <path>' + str(img_path) + '.jpg' + '</path>\n') ###若准备的图片为jpg格式则将png替换为jpg
xml_file.write(' <size>\n')
xml_file.write(' <width>' + str(width) + '</width>\n')
xml_file.write(' <height>' + str(height) + '</height>\n')
xml_file.write(' <depth>3</depth>\n')
xml_file.write(' </size>\n')
xml_file.write(' <segmented>0</segmented>\n')
for bbox in content['annotations'][j]['annotation']:
xmin=bbox['x']
ymin=bbox['y']
xmax=bbox['x']+bbox['w']
ymax=bbox['y']+bbox['h']
gt_label = content['annotations'][j]['type']
xmin,ymin,xmax,ymax= int(xmin),int(ymin),int(xmax),int(ymax)
xml_file.write(' <object>\n')
xml_file.write(' <name>'+str(gt_label)+'</name>\n')
xml_file.write(' <pose>Unspecified</pose>\n')
xml_file.write(' <truncated>0</truncated>\n')
xml_file.write(' <difficult>0</difficult>\n')
xml_file.write(' <bndbox>\n')
xml_file.write(' <xmin>'+str(xmin)+'</xmin>\n')
xml_file.write(' <ymin>'+str(ymin)+'</ymin>\n')
xml_file.write(' <xmax>'+str(xmax)+'</xmax>\n')
xml_file.write(' <ymax>'+str(ymax)+'</ymax>\n')
xml_file.write(' </bndbox>\n')
xml_file.write(' </object>\n')
xml_file.write('</annotation>')
xml_file.close()
把图片文件copy到JPEGImages文件夹下,直接使用Linux命令cp -r


















 251
251

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











