






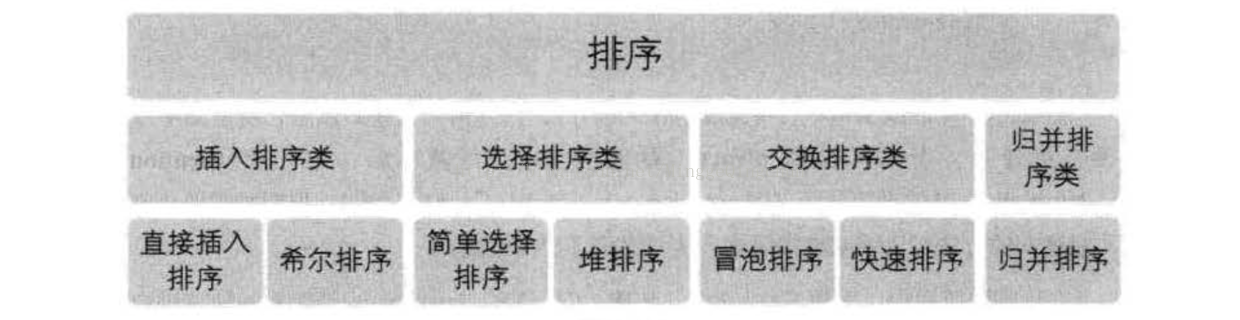
作者:方圆一里 链接:http://www.jianshu.com/p/b59df9d0a169 來源:简书 著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。根据将排序记录是否全部放置在内存中,将排序分为内排序和外排序,之前讲的都是内排序,这里总结一下,内排序分为四类:插入排序、交换排序、选择排序和归并排序。前几篇介绍的7种算法分别是各种分类的代表算法:
目前还没有十全十美的排序算法,即使是快速排序法,也只是在整体性能上优越,它也存在排序不稳定、需要大量辅助空间、对少量数据排序无优势等不足。这里我们就来从多个角度来剖析一下提到的各种排序的长与短。
我们将7种算法的各种指标进行对比: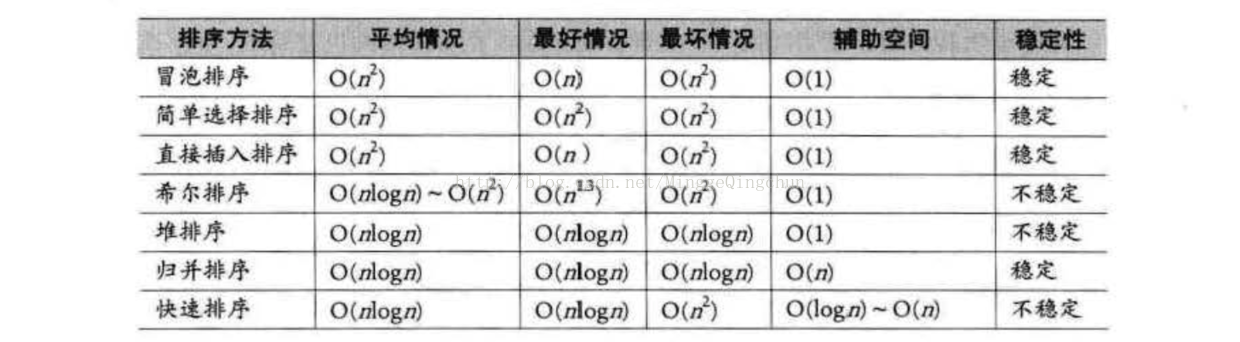
从算法的简单性来看,分为两类:
- 简单算法:冒泡、选择、插入。
- 改进算法:希尔、堆、归并、快速。
平均情况: 显然最后3种改进算法要胜过希尔排序,并远远胜超过前3种简单算法,所以堆、归并、快速算法要好一点。
最好情况:冒泡和插入排序要更胜一筹,如果你的待排序序列总是基本有序,你就考虑这两种算法。
最坏情况:堆排序和归并排序又强于快速排序以及其他简单排序。
空间复杂度: 归并排序和快速排序就比较消耗内存。所以不要选择归并排序和快速排序。
稳定性: 归并排序 独占鳌头。
待排序记录的个数: 待排序的个数n越少,采用简单排序方法越合适,反之,n越大,采用改进排序方法越合适。至于n多少比较合适,目前还没有定义。
从表中看,似乎选择排序在3种简单排序中性能最差,其实也不完全是,比如,如果比较的关键字信息量比大,比较次数比较多,这样移动记录所花费的时间也就越多,我们给出3种简单排序算法的移动次数比较:
你会发现选择排序就非常有优势,原因在于它是通过大量比较后选择明确记录进行移动,有的放矢。因此 对于数量不是很大而比较需求比较大的时候,选择排序算法是占优的。另外,记录的关键信息量大小对那四个改进算法影响不大。
总之,从指标来看,快速排序是性能最好的排序算法,如果求稳定的话,建议选择归并排序。
iOS算法总结-回顾



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









