






有向图下多智能体自适应二分时变编队控制;多智能体编队;自适应二分时变;有向图(有参考文献)
ID:58199717991502907
诚信第一
标题:有向图下多智能体自适应二分时变编队控制
摘要:随着人工智能和自动化技术的不断发展,多智能体编队控制已经成为了研究热点之一。在本文中,我们将介绍一种新的有向图下多智能体自适应二分时变编队控制方法。该方法基于有向图的建模和自适应控制思想,能够实现在复杂动态环境下的多智能体编队控制。
-
引言
随着无人机、无人车等多智能体系统的广泛应用,多智能体编队控制成为了一个重要的研究方向。传统的编队控制方法通常面临着网络通信延迟、动态环境变化以及智能体之间的相互作用等挑战。为了克服这些挑战,本文提出了一种有向图下的多智能体自适应二分时变编队控制方法。 -
有向图建模
在多智能体系统中,智能体之间的关系通常可以用一个有向图来表示。在有向图中,每个智能体对应一个节点,边表示智能体之间的关系。有向图的拓扑结构对于编队控制至关重要,决定了智能体之间的通信和相互作用方式。 -
自适应二分时变编队控制
为了实现多智能体的编队控制,本文提出了一种自适应二分时变的控制策略。该策略基于有向图的拓扑结构和智能体之间的相互作用,通过自适应调整智能体之间的关系和通信方式,实现编队控制的稳定性和鲁棒性。
在具体实现中,我们首先对有向图进行划分,将智能体分为两个子集,每个子集对应一个编队。然后,根据当前的环境和目标要求,自适应调整子集之间的连接关系和通信方式,使得编队能够自适应地适应环境变化。
-
实验结果与分析
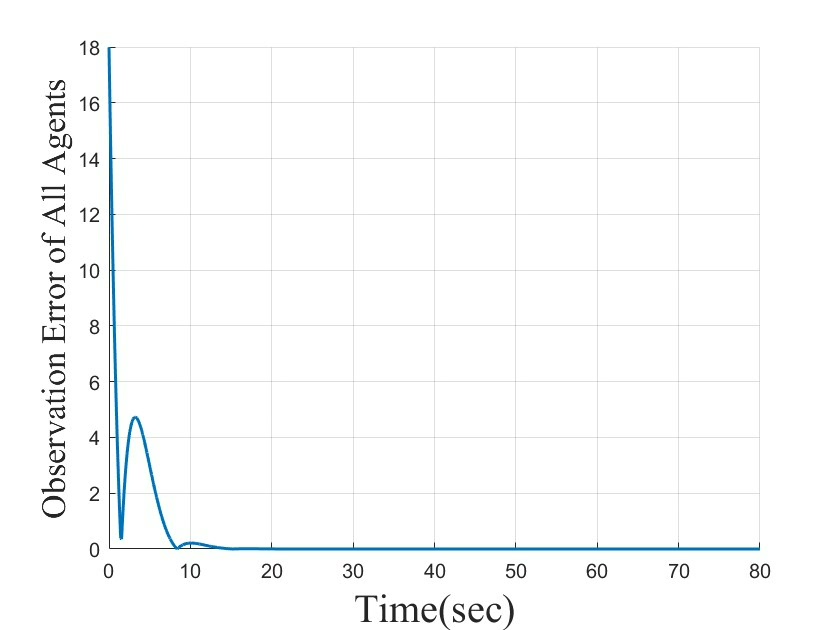
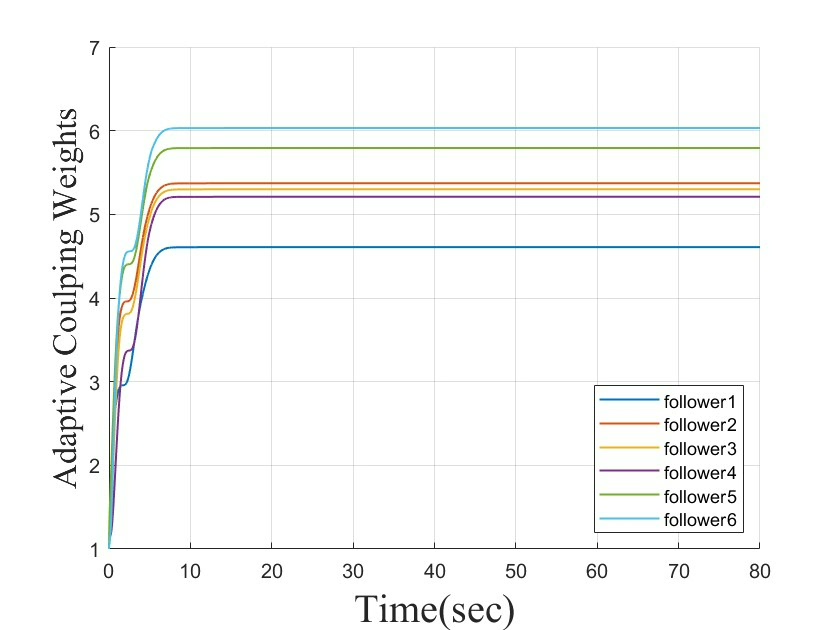
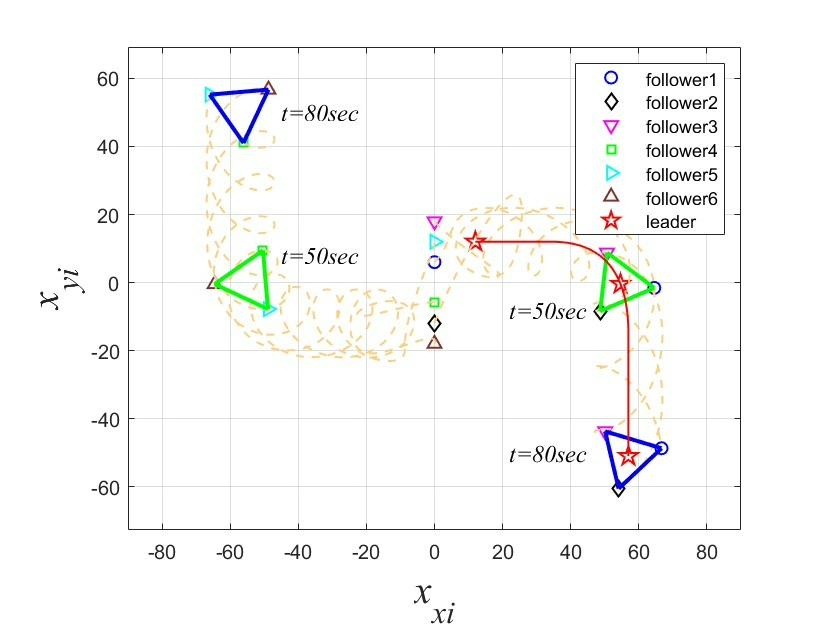
为了验证所提出的方法的有效性,我们进行了一系列仿真实验。实验结果表明,所提方法能够在复杂动态环境下实现多智能体的稳定编队控制。同时,该方法还具有较强的适应性和鲁棒性,能够自适应地应对环境变化和系统故障。 -
结论与展望
本文提出了一种有向图下多智能体自适应二分时变编队控制方法,通过自适应调整智能体之间的关系和通信方式,实现了多智能体的稳定编队控制。未来的研究可以进一步探索如何应用此方法于实际系统中,并进一步提高编队控制的性能和鲁棒性。
关键词:多智能体编队控制、自适应二分时变、有向图、控制稳定性、鲁棒性
【相关代码,程序地址】:http://fansik.cn/717991502907.html
















 1930
1930

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









