









进程间通信至少可以通过传送打开文件来实现,不同的进程通过一个或多个文件来传递信息,事实上,在很多应用系统里,都使用了这种方法。但一般说来, 进程间通信(IPC:InterProcess Communication)不包括这种似乎比较低级的通信方法。Unix系统中实现进程间通信的方法很多,而且不幸的是,极少方法能在所有的Unix系 统中进行移植(唯一一种是半双工的管道,这也是最原始的一种通信方式)。而Linux作为一种新兴的操作系统,几乎支持所有的Unix下常用的进程间通信 方法:管道、消息队列、共享内存、信号量、套接口等等。
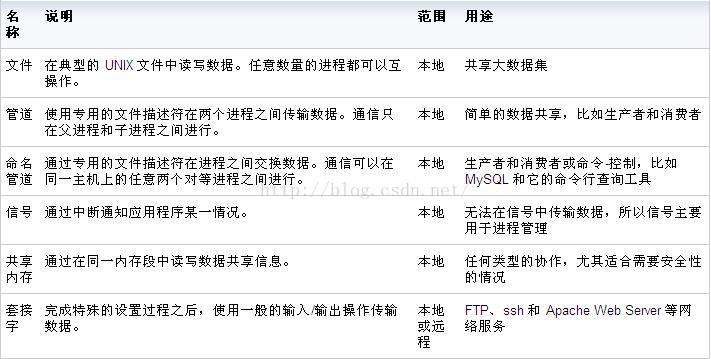
管道概念
管道是Unix中最古老的进程间通信的形式,我们把从一个进程连接到另一个进程的一个数据流称为一个“管道”, 管道的本质是固定大小的内核缓冲区;它包括无名管道和有名管道两种,前者用于父进程和子进程间的通信,后者用于运行于同一台机器上的任意两个进程间的通信。
管道限制
1)管道是半双工的,数据只能向一个方向流动;需要双方通信时,需要建立起两个管道;
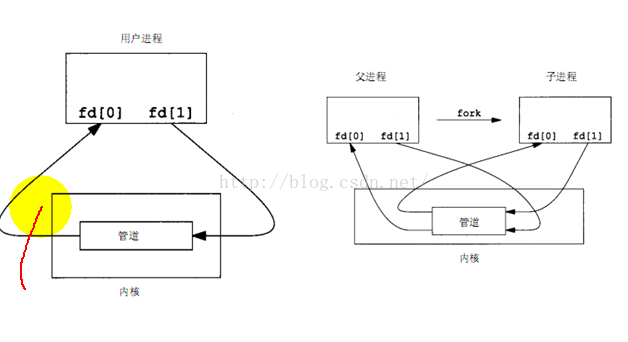
2)匿名管道只能用于具有共同祖先的进程(如父进程与fork出的子进程)之间进行通信, 原因是pipe创建的是两个文件描述符, 不同进程直接无法直接获得;(通常,一个管道由一个进程创建,然后该进程调用fork,此后父子进程共享该管道)
匿名管道创建
#include <unistd.h>
int pipe(int pipefd[2]); 参数
Pipefd:文件描述符数组,其中pipefd[0]表示读端,pipefd[1]表示写端,示意图如下:
(1)接下来,我们利用匿名管道来进行父子进程之间的通信,子进程向父进程发送信息。
int main()
{
int pipefd[2];
if(pipe(pipefd)==-1)
ERR_EXIT("pipe error!");
pid_t pid;
pid=fork();
if(pid==-1)
ERR_EXIT("fork error");
if(pid==0)
{
close(pipefd[0]);
write(pipefd[1],"hello",5);
close(pipefd[1]);
exit(EXIT_SUCCESS);
}
close(pipefd[1]);
char buf[10]={0};
read(pipefd[0],buf,10);
printf("buf=%s\n",buf);
return 0;
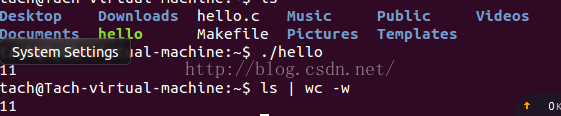
}(2)我们来模拟实现管道命令 ls | wc -w 关键点就是:
1.子进程运行ls,dup2(pipefd[1],STDOUT_FILENO)重定向标准输出,定位到管道写端,ls写入到管道写端而不是标准输出设备;
2.父进程运行wc -w ,wc获取数据的时候从管道读端获取,不再从标准输入设备。
3.通过管道, 将子进程的输出发送到wc的输入 。
int main()
{
int pipefd[2];
if(pipe(pipefd)==-1)
ERR_EXIT("pipe error!");
pid_t pid;
pid=fork();
if(pid==-1)
ERR_EXIT("fork error");
if(pid==0)
{
dup2(pipefd[1],STDOUT_FILENO);//重定向输出
close(pipefd[0]);
close(pipefd[1]);
execlp("ls","ls",NULL);//若出错才执行下面的代码
fprintf(stderr,"error execute ls\n");
exit(EXIT_FAILURE);
}
dup2(pipefd[0],STDIN_FILENO);
close(pipefd[0]);
close(pipefd[1]);
execlp("wc","wc","-w",NULL);
fprintf(stderr,"error execute wc\n");
exit(EXIT_FAILURE);
return 0;
}
(3)实现cp操作
不带任何参数的cat命令是从标准输入读入命令,写到标准输出。0->Makefile ; 1->Makefile2;
int main()
{
close(0);
open("Makefile",O_RDONLY);
close(1);
open("Makefile2",O_WRONLY | O_CREAT | O_TRUNC,0644);
execlp("cat","cat",NULL);
return 0;
}
我们对以上的规则一一进行验证。
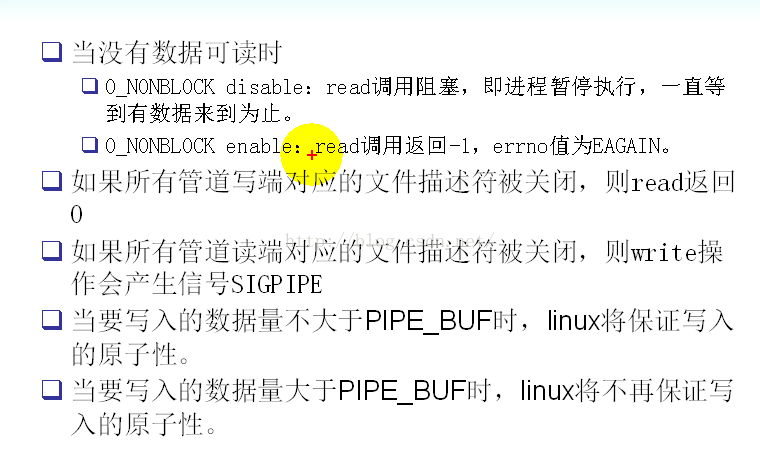
(1)如果管道为空,那么read会阻塞(模式),如果使用非阻塞模式的话,也就是使用fcntl函数,对模式进行修改后
int flags=fcntl(pipefd[0],F_SETFL,flags | O_NONBLOCK);
read(pipefd[0],buf,10);此时,读操作会失败,显示资源暂且不可用的错误。
(2)管道的写端关闭,read打印输出0,但是并不报错误,显示读到了文件的末尾。
int main()
{
int pipefd[2];
if (pipe(pipefd) != 0)
err_exit("pipe error");
pid_t pid = fork();
if (pid == -1)
err_exit("fork error");
else if (pid == 0)
{
close(pipefd[1]);
exit(EXIT_SUCCESS);
}
close(pipefd[1]);
sleep(2);
char buf[2];
if (read(pipefd[0], buf, sizeof(buf)) == 0)
cout << "sure" << endl;
} int main()
{
if (signal(SIGPIPE, handler) == SIG_ERR)
err_exit("signal error");
int pipefd[2];
if (pipe(pipefd) != 0)
err_exit("pipe error");
pid_t pid = fork();
if (pid == -1)
err_exit("fork error");
else if (pid == 0)
{
close(pipefd[0]);
exit(EXIT_SUCCESS);
}
close(pipefd[0]);
sleep(2);
char test;
if (write(pipefd[1], &test, sizeof(test)) < 0)
err_exit("write error");
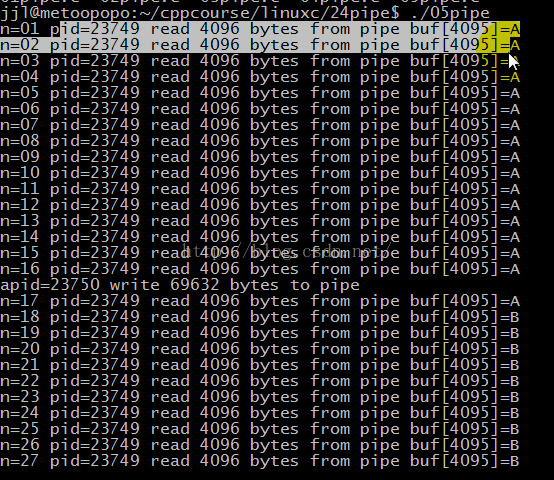
} (4)关于PIPE_BUF和原子性操作之间的关系,
已知管道的PIPE_BUF为4K, 我们启动两个进程A, B向管道中各自写入68K的内容, 然后我们以4K为一组, 为了方便我们查看管道最后一个字节的内容, 多运行该程序几次, 就会发现这68K的数据会有交叉写入的情况 。
int main()
{
const int TEST_BUF = 68 * 1024; //设置写入的数据量为68K
char bufA[TEST_BUF];
char bufB[TEST_BUF];
memset(bufA, 'A', sizeof(bufA));
memset(bufB, 'B', sizeof(bufB));
int pipefd[2];
if (pipe(pipefd) != 0)
err_exit("pipe error");
pid_t pid;
if ((pid = fork()) == -1)
err_exit("first fork error");
else if (pid == 0) //第一个子进程A, 向管道写入bufA
{
close(pipefd[0]);
int writeBytes = write(pipefd[1], bufA, sizeof(bufA));
cout << "A Process " << getpid() << ", write "
<< writeBytes << " bytes to pipe" << endl;
exit(EXIT_SUCCESS);
}
if ((pid = fork()) == -1)
err_exit("second fork error");
else if (pid == 0) //第二个子进程B, 向管道写入bufB
{
close(pipefd[0]);
int writeBytes = write(pipefd[1], bufB, sizeof(bufB));
cout << "B Process " << getpid() << ", write "
<< writeBytes << " bytes to pipe" << endl;
exit(EXIT_SUCCESS);
}
// 父进程
close(pipefd[1]);
sleep(2); //等待两个子进程写完
char buf[4 * 1024]; //申请一个4K的buf
int fd = open("save.txt", O_WRONLY|O_TRUNC|O_CREAT, 0666);
if (fd == -1)
err_exit("file open error");
while (true)
{
int readBytes = read(pipefd[0], buf, sizeof(buf));
if (readBytes == 0)
break;
if (write(fd, buf, readBytes) == -1)
err_exit("write file error");
cout << "Parent Process " << getpid() << " read " << readBytes
<< " bytes from pipe, buf[4095] = " << buf[4095] << endl;
}
} 
注:我们可以使用man 7 pipe查询有关管道容量的信息;另外,管道的容量不一定就等于PIPE_BUF, 如在Ubuntu中, 管道容量为64K, 而PIPE_BUF为4K















 1320
1320

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









