









目录
一,四元数相关概念
四元数
- 在vex内四元数为((x,y,z),w);
//VEX内获得四元数 vector4 quaternion(matrix3 rotations) //仅应用矩阵的旋转信息 vector4 quaternion(float angle, vector axis) vector4 quaternion(vector angleaxis) //方向为旋转轴,大小为旋转角度 vector4 eulertoquaternion(vector rotations, int order)
注,数学运算,如绕某向量 K=(
,
,
) 旋转
,则四元数为:
- (x,y,z) = (

- w =

- 且满足条件:
+
+
+
=1
欧拉角
由环绕三个轴旋转的角度组成的矢量表示
- 绕著x轴的旋转(Roll),绕著交点线的旋转(Pitch),绕著z轴的旋转(Yaw);
- 任何旋转矩阵都是由三个基本旋转矩阵复合而成的;
- 不同旋转顺序,结果不同,默认旋转顺序XYZ;
//VEX内获得欧拉角 vector quaterniontoeuler(vector4 orient, int order)注,可使用Transform节点应用欧拉角;
常用四元数相关函数
dihedral(),计算一矢量旋转到另一矢量的旋转矩阵或四元数
quaternion(),创建表示旋转的四元数
qrotate(),应用四元数旋转
qmultiply(),合并两个四元数
qinvert(),反转四元数
qdistance(),计算两个四元数间的弧度
qconvert(),将四元数转化为3*3矩阵
eulertoquaternion(),将欧拉角转化为四元素
quaterniontoeuler(),将四元素转化为欧拉角
slerp(),矩阵或四元数融合;
相互转换
//矩阵转四元数 matrix m = detail(1, 'xform'); vector4 q = quaternion(matrix3(m));
//四元数转矩阵 vector4 q = quaternion(ch('ang'), chv('axis')); matrix3 m = qconvert(q);
//欧拉角转矩阵或四元数 v@euler_angle = degrees(chv('ang')); vector4 q = eulertoquaternion(@euler_angle); matrix3 m = qconvert(q);
//四元数或矩阵,获取欧拉角 matrix m = detail(1, 'xform'); vector4 q = quaternion(matrix3(m)); v@euler_angle = degrees(quaterniontoeuler(q, 0));
二,案例
- 设置旋转,dihedral,quaternion,orient(可用于copy);
- 合并旋转,qmultiply
- 应用旋转,qrotate
参考:使用houdini绑定系统里的rigdoctor节点来提取矩阵_哔哩哔哩_bilibili
案例:沿面中心翻转
//point层级,并获取所属面的其他点
int pts[] = primpoints(0, @primnum);
vector pos0 = point(0, 'P', pts[0]);
vector pos1 = point(0, 'P', pts[1]);
vector pos2 = point(0, 'P', pts[2]);
vector pos3 = point(0, 'P', pts[3]);//方法一,先归到中心点旋转,在还原 vector center = (pos0+pos1+pos2+pos3)/4; vector axis = normalize(pos1-pos0); @P -= center; float ang = @Time; vector4 q = quaternion(ang, axis); @P = qrotate(q,@P); @P += center;
//方法二,使用maketransform vector pivot = (pos0+pos1+pos2+pos3)/4; vector axis = normalize(pos1-pos0); //直接绕axis旋转 float ang = @Time; vector4 q_r = quaternion(ang, axis); vector r = degrees(quaterniontoeuler(q_r, 0)); @P *= maketransform(0,0,0,r,1,pivot,0); //绕x轴旋转,中心点旋转偏移到axis float ang = @Time; vector dir = set(1,0,0); vector r = dir * degrees(ang); vector4 q_pr = dihedral(dir, axis); vector pr = degrees(quaterniontoeuler(q_pr, 0)); @P *= maketransform(0,0,0,r,1,pivot,pr);
//方法三,使用函数instance vector pivot = (pos0+pos1+pos2+pos3)/4; vector axis = normalize(pos1-pos0); float ang = @Time; vector4 orient = quaternion(ang, axis); @P *= instance(pivot,0,1,0,orient,pivot); //P、pivot相同即位置没动
//方法二,手搓矩阵(即将本身或局部坐标系恢复到世界坐标系,旋转后,在还原到原坐标系) vector center = (pos0+pos1+pos2+pos3)/4; vector xaxis = normalize(pos1-pos0); vector yaxis = normalize(prim(0,'N',@primnum)); vector zaxis = normalize(cross(xaxis, yaxis)); matrix m = set(xaxis, yaxis, zaxis, center); m.xa = m.ya = m.za = 0; @P *= invert(m); float ang = @Time; vector4 q = quaternion(ang, set(1,0,0)); @P = qrotate(q, @P); @P *= m;
案例:路径导弹
//方法一
vector tangentu = -primuv(1, 'tangentu', 0, ch('u'));
vector tangentv = primuv(1, 'tangentv', 0, ch('u'));
vector pos = primuv(1, 'P', 0, ch('u'));
vector4 rot1 = dihedral(set(1,0,0), tangentu);
vector4 rot2 = quaternion(@Time*10, set(1,0,0));
vector4 rot = qmultiply(rot1, rot2);
//如不是pack物体
@P = qrotate(rot, @P) + pos;
//如是pack物体,使用以下代码
@P = pos;
matrix3 m = qconvert(rot);
setprimintrinsic(0, "transform", 0, m);//方法二
vector x_axis = -primuv(1, 'tangentu', 0, ch('u'));
vector y_axis = primuv(1, 'tangentv', 0, ch('u'));
vector z_axis = cross(x_axis, y_axis);
vector pos = primuv(1, 'P', 0, ch('u'));
vector4 q = quaternion(@Time*10, set(1,0,0));
@P = qrotate(q, @P);
matrix m = set(normalize(x_axis), normalize(y_axis), normalize(z_axis), pos);
@P *= m;
案例:RBD刚体还原过渡
- RBD刚体的中心和质心(rest信息)的区别;
注,pack对象intrinsic属性
- transform,存储旋转信息,使用setprimintrinsic函数设置;
- packedfulltransform,存储所有的变换信息(只读);
//DOP内部还原的原始位置为rest,注意设置input端口
//直接用rbdbulletsolver(SOP),原始位置还是originP
float bias = chramp('bias', fit(@Frame-@offset*10,75,125,0,1));
matrix3 cm = primintrinsic(0, 'transform', @ptnum);
matrix3 blend = slerp(cm, 3@m, pow(bias,2));
setprimintrinsic(0, 'transform', @ptnum, blend);
v@P = lerp(@P, v@rest, bias);float bias = chramp('bias', fit(@Frame-@offset*10,75,125,0,1));
matrix fm = getpackedtransform(0, @ptnum);
vector t = cracktransform(0, 0, 0, 0, 4@fm);
translate(4@fm, -t);
translate(4@fm, v@rest);
matrix blend = slerp(fm, 4@fm, bias);
setpackedtransform(0, @ptnum, blend);
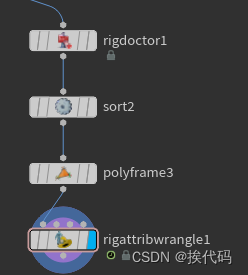
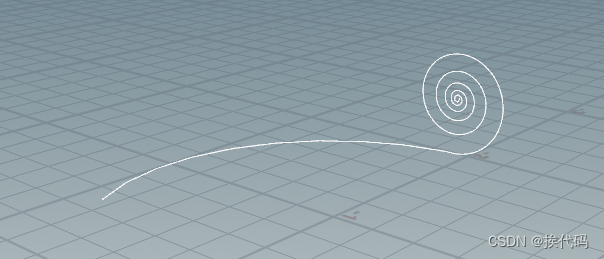
案例:拉直螺旋线
- 原理1:以0号点为中心旋转1号点及后续所有点到Y轴上,在以1号点为中心旋转2号点及后续所有点到Y轴上,依次类推;可使用solver或循环(在旋转一次的基础在旋转,容易理解);
- 原理2,每层循环记录上次循环的上一个拉直点(prepos);每层循环先移动到原点旋转Y轴,在加上prepos;
- 原理3,先记录每个点与前一个点的旋转信息,每个点依次旋转到前点和前前点的方向上,最后对齐到Y轴;
- for等循环体内的point()始终都是读取输入端口的属性,setpointattrib始终会在输出时设置;
//solver节点内,detail层级 int i = @Frame; vector pos0 = point(0, 'P', i-1); vector pos1 = point(0, 'P', i); vector4 rot = dihedral(pos1-pos0, set(0,1,0)); vector pos = qrotate(rot, pos1-pos0); setpointattrib(0, 'P', i, pos+pos0); for(int j=i+1; j<npoints(0); j++){ vector pos2 = point(0, 'P', j); pos2 = qrotate(rot, pos2-pos0); setpointattrib(0, 'P', j, pos2+pos0); }
//point层级(也可是detail层级),每层循环互不关联 vector prepos = 0; for(int i=1; i< @Frame; i++){ vector pivot = point(0, 'P', i-1); vector pos = point(0, 'P', i); vector4 rot = dihedral(pos-pivot, set(0,1,0)); if(@ptnum>=i){ vector mpos = qrotate(rot, @P-pivot); //@P=mpos+prepos; //会对下一循环影响 setpointattrib(0, 'P', @ptnum, mpos+prepos); } prepos = qrotate(rot, pos-pivot)+prepos; }
//detail层级 vector pos[] = array(); for(int i=0; i<@numpt; i++){ pos[i] = point(0, 'P', i); } for(int i=1; i<@Frame; i++){ vector4 rot = dihedral(pos[i]-pos[i-1], set(0,1,0)); for(int j=i; j<@numpt; j++){ pos[j] = qrotate(rot, pos[j]-pos[i-1]); pos[j] += pos[i-1]; } } for(int i=0; i<@numpt; i++){ setpointattrib(0, 'P', i, pos[i]); }
//point层级,当前点位置与前一个点位置的旋转信息 vector pos1 = point(0, 'P', @ptnum-1); vector pos2 = point(0, 'P', @ptnum-2); vector4 rot = dihedral(@P-pos1, pos1-pos2); if(@ptnum==1) rot = dihedral(@P, set(0,1,0)); p@rot = rot; vector4 rot1 = set(0,0,0,1); p@rot = slerp(rot1, p@rot, ch('val'));//point层级,每个点都是相当于先对齐前一个点,在对齐前前点...,直到最后对齐Y轴 vector prepos = 0; vector4 prerot = set(0,0,0,1); for(int i=0; i<=@ptnum; i++){ vector pos = point(0, 'P', i); vector pivot = point(0, 'P', i-1); prerot = qmultiply(prerot, point(0, 'rot', i)); pos -= pivot; pos = qrotate(prerot, pos); pos += prepos; prepos = pos; @P = pos; }
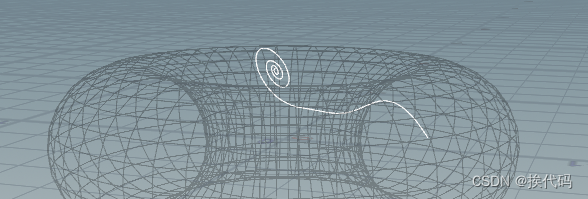
案例:卷曲螺旋线
- 原理1:每个点,以该点为中心,先将之前所有点旋转拉平,在旋转卷曲;
- 原理2:先记录每个点与后一个点的旋转信息;
//point层级,solver(SOP)for循环 int num = chi('num'); if(@ptnum < num){ vector pivot = point(0, 'P', num); vector prepos = point(0, 'P', num-1); vector nextpos = point(0, 'P', num+1); float ang = ch('ang')*pow(point(0, 'curveu', num)+0.01,-0.8); vector axis = normalize(cross(set(0,1,0), nextpos-pivot)); vector4 rot1 = quaternion(ang, axis); vector4 rot2 = dihedral(prepos-pivot, pivot-nextpos); vector4 rot = qmultiply(rot1, rot2); @P -= pivot; @P = qrotate(rot, @P); @P += pivot; }
//detail层级 vector pos[] = array(); for(int i=0; i<@numpt; i++){ pos[i] = point(0, 'P', i); } for(int i=0; i<chi('num'); i++){ vector pivot = point(0, 'P', i); vector prepos = point(0, 'P', i-1); vector nextpos = point(0, 'P', i+1); float ang = ch('ang')*pow(point(0, 'curveu', i)+0.01,-0.8); vector axis = normalize(cross(set(0,1,0), nextpos-pivot)); vector4 rot1 = quaternion(ang, axis); vector4 rot2 = dihedral(prepos-pivot, pivot-nextpos); vector4 rot = qmultiply(rot1, rot2); for(int j=0; j<i; j++){ pos[j] -= pivot; pos[j] = qrotate(rot, pos[j]); pos[j] += pivot; } } for(int i=0; i<chi('num'); i++){ setpointattrib(0, 'P', i, pos[i]); }
//point层级,当前点位置与后一个点位置的旋转并卷曲信息 vector pivot = point(0, 'P', @ptnum+1); vector pos2 = point(0, 'P', @ptnum+2); vector4 rot1 = dihedral(@P-pivot, pivot-pos2); vector axis = normalize(cross(set(0,1,0), pos2-pivot)); float ang = ch('ang')*pow(@curveu+0.01,-0.8); vector4 rot2 = quaternion(ang, axis); vector4 rot = qmultiply(rot2, rot1); p@srot = slerp(set(0,0,0,1), rot, clamp(@Frame-101*@curveu,0,1));//point层级,此节点之前使用sort节点反向点号 vector prepos = 0; vector4 prerot = set(0,0,0,1); for(int i=0; i<=@ptnum; i++){ vector pos = point(0, 'P', i); vector pivot = point(0, 'P', i-1); prerot = qmultiply(prerot, point(0, 'srot', i)); pos -= pivot; pos = qrotate(prerot, pos); pos += prepos; prepos = pos; @P = pos; }
//使用rigdoctor可提取原模型本身旋转后的位移信息 if(@ptnum<@Frame){ vector pivot = point(0, 'P', @ptnum+1); vector pos2 = point(0, 'P', @ptnum+2); vector4 rot1 = dihedral(@P-pivot, pivot-pos2); vector axis1 = point(0, 'tangentv', @ptnum+1); vector axis2 = point(0, 'tangentv', @ptnum+2); vector4 axisrot = dihedral(axis2, axis1); vector axis = normalize(cross(set(0,1,0), pos2-pivot)); float ang = ch('ang')*pow(1-@curveu+0.01,-0.5); vector4 rot2 = quaternion(ang, axis); vector4 rot = qmultiply(axisrot, rot1); rot = qmultiply(rot, rot2); matrix3 m = qconvert(rot); 4@localtransform *= m; }
//针对原曲线不在同一平面,卷曲后也不再同一平面的问题修正 vector pos[] = array(); for(int i=0; i<@numpt; i++){ pos[i] = point(0, 'P', i); } for(int i=0; i<chi('num'); i++){ vector pivot = point(0, 'P', i); vector prepos = point(0, 'P', i-1); vector nextpos = point(0, 'P', i+1); float ang = ch('ang')*pow(point(0, 'curveu', i)+0.01,-0.8); //对齐N,即旋转为同一切面 vector N = point(0, 'N', i); vector preN = point(0, 'N', i-1); vector4 prerot = dihedral(preN, N); vector axis = normalize(cross(N, nextpos-pivot)); vector4 rot1 = quaternion(ang, axis); vector4 rot2 = dihedral(prepos-pivot, pivot-nextpos); vector4 rot = qmultiply(rot1, rot2); for(int j=0; j<i; j++){ pos[j] -= pivot; pos[j] = qrotate(rot, pos[j]); pos[j] = qrotate(prerot, pos[j]); pos[j] += pivot; } } for(int i=0; i<chi('num'); i++){ setpointattrib(0, 'P', i, pos[i]); }
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









