






扩展卡尔曼滤波观测器 STM32 Simulink自动代码生成 永磁同步电机
模型+Keil集成工程+生成代码教学视频
ID:78350674236903980
哎嘿嘿嘿唔
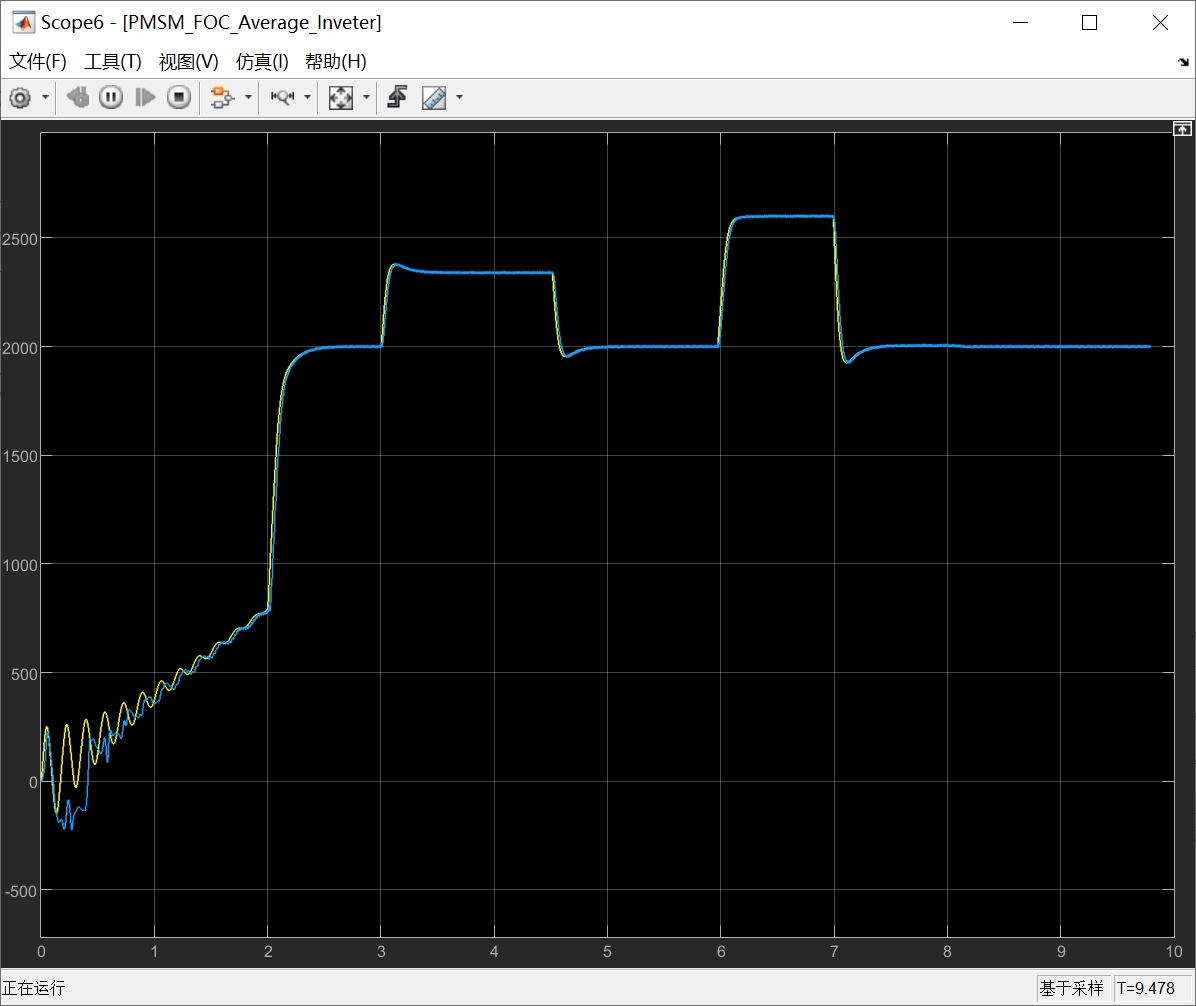
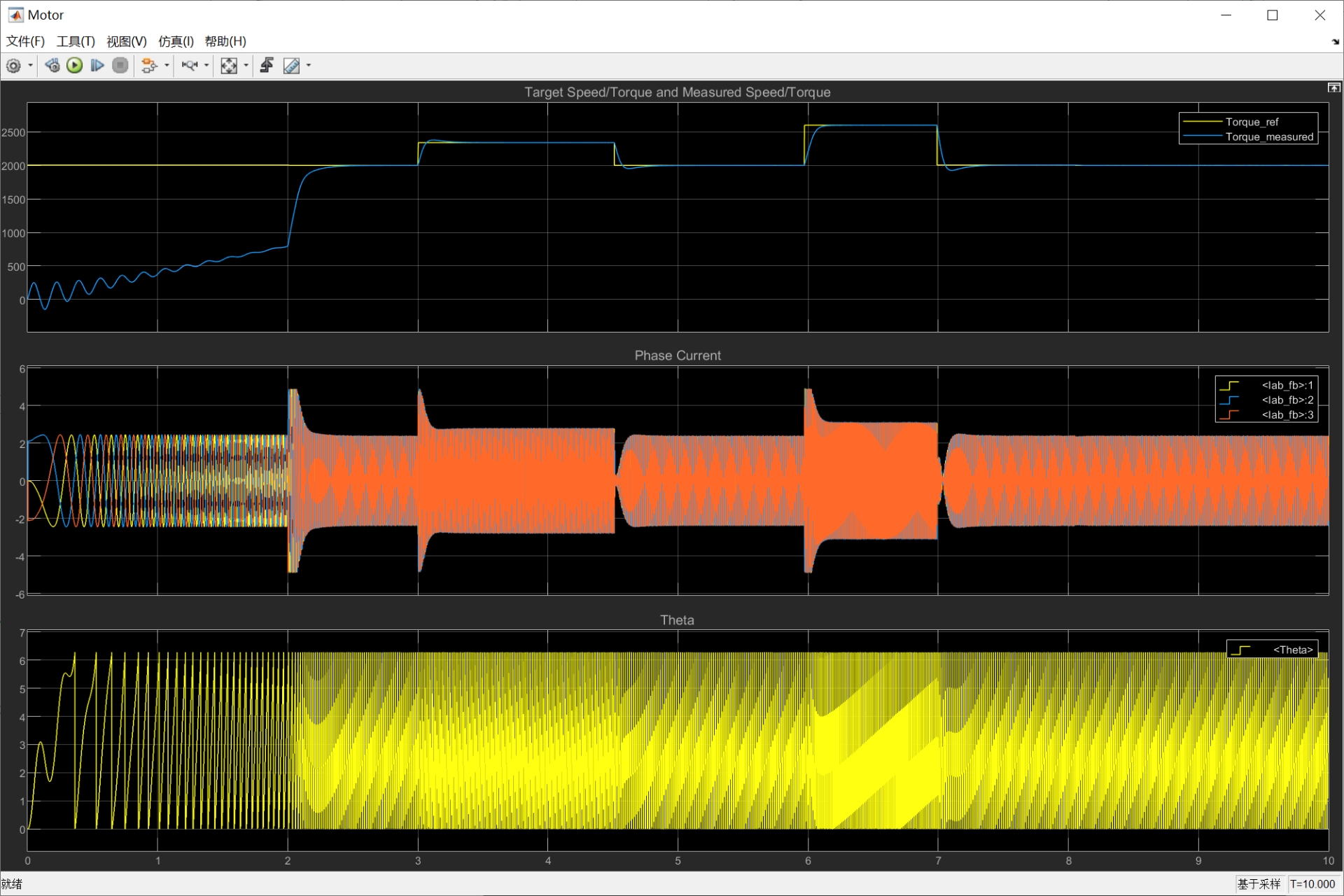
在现代科技的快速发展下,嵌入式系统的应用越来越广泛。而在这些嵌入式系统中,STM32芯片作为一种常见的微控制器芯片,被广泛应用于各种领域,如工业自动化、智能家居和机器人等。而永磁同步电机作为一种高效、可靠的电机类型,在许多应用中也得到了广泛的应用。在设计和控制永磁同步电机系统时,传感器测量数据的准确性和稳定性非常重要,而卡尔曼滤波器作为一种常见的滤波器技术,可以有效地提高传感器测量数据的精度。因此,本文将围绕扩展卡尔曼滤波观测器在STM32芯片上的应用展开讨论。
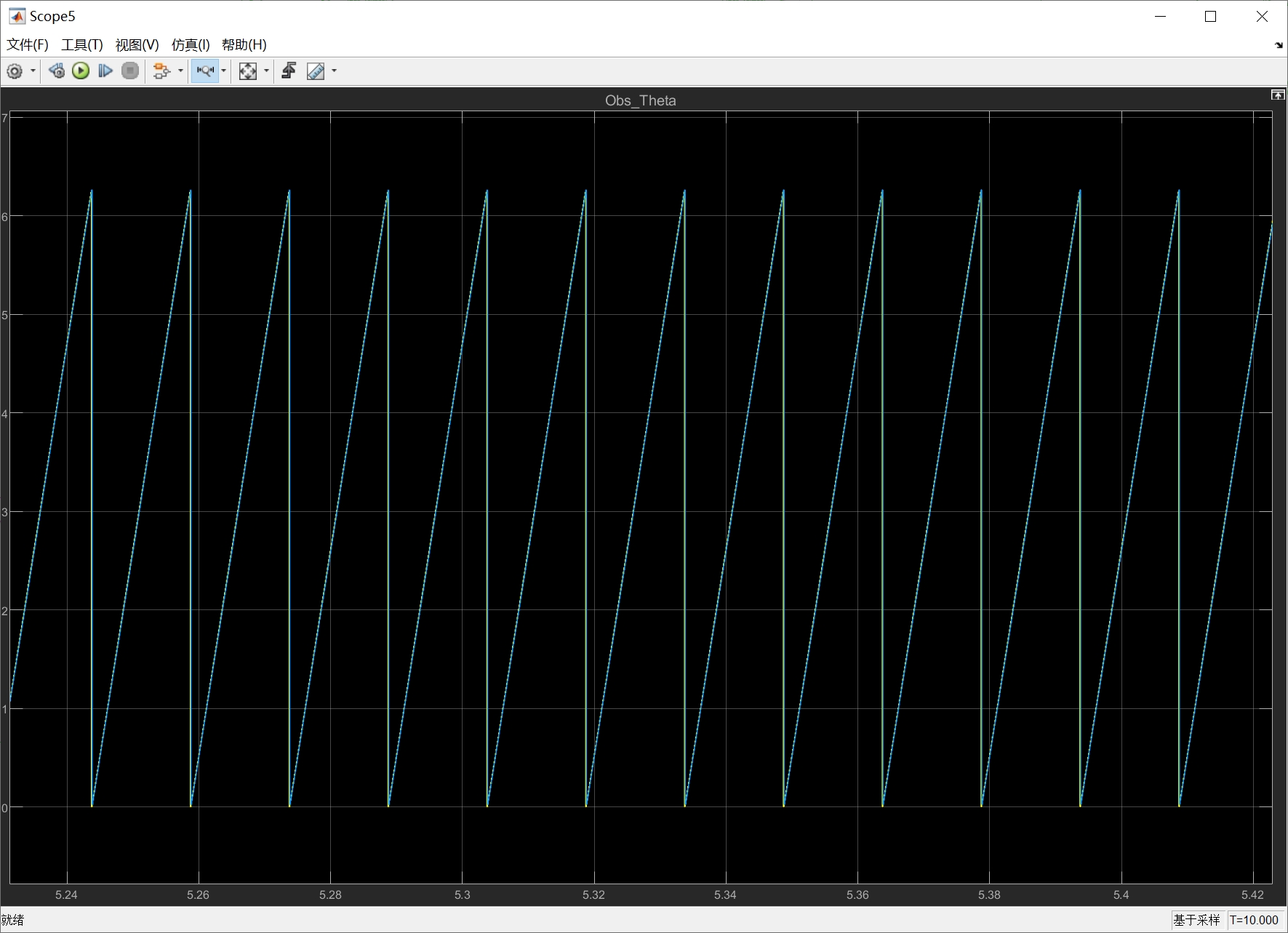
首先,我们需要了解什么是卡尔曼滤波器。卡尔曼滤波器是一种基于状态空间模型的最优滤波器,它通过对测量数据和系统模型的融合,可以在测量误差较大的情况下,估计出系统的实际状态。而扩展卡尔曼滤波器是对传统卡尔曼滤波器的一种改进,它通过对非线性系统模型进行线性化,可以处理非线性的系统,并在非线性系统中估计状态。
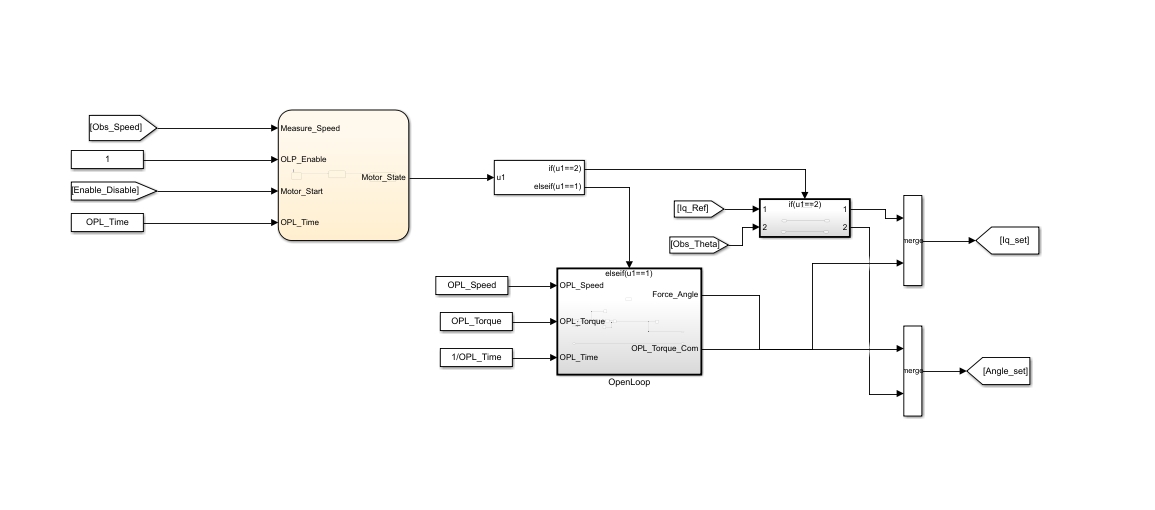
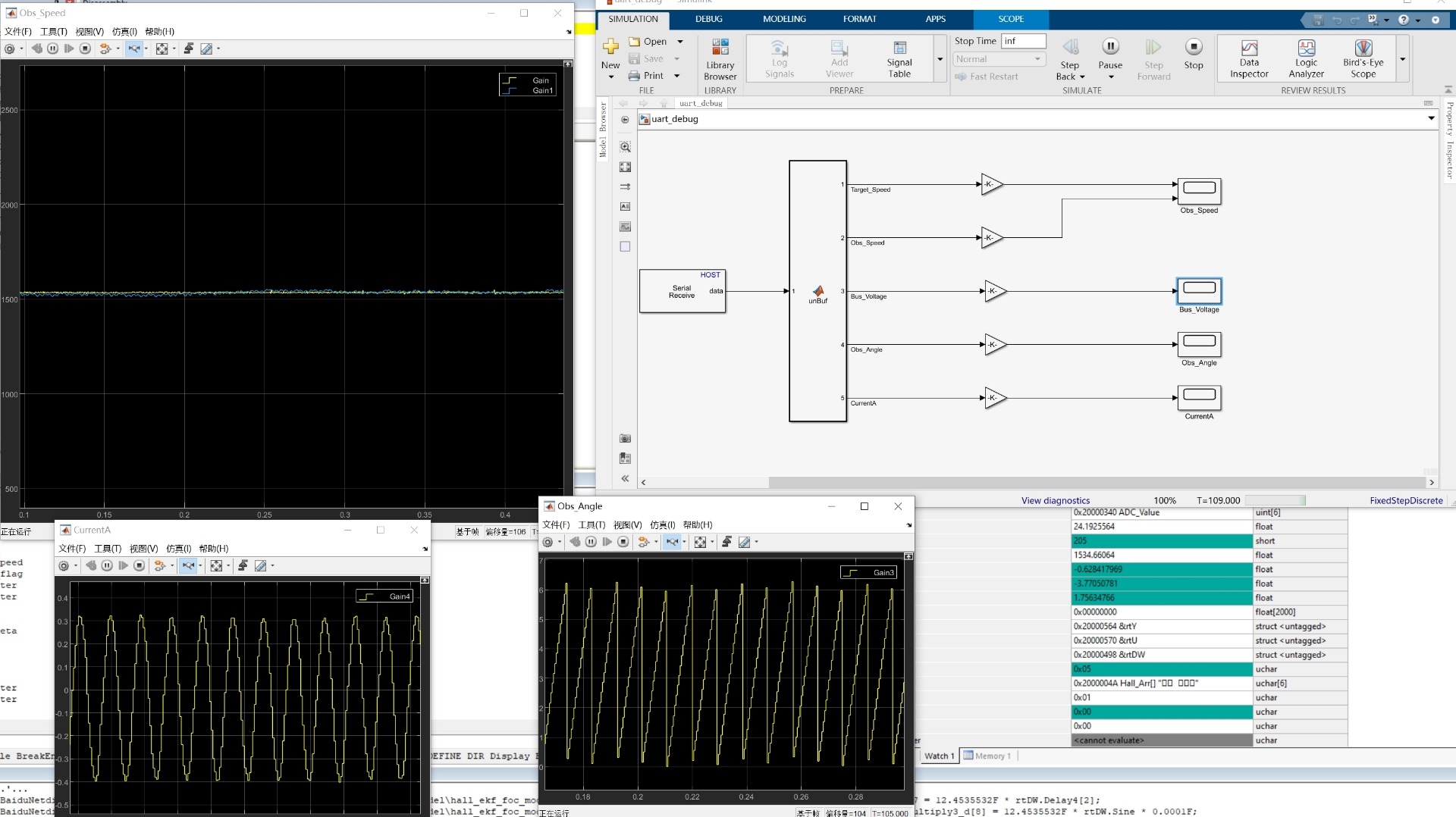
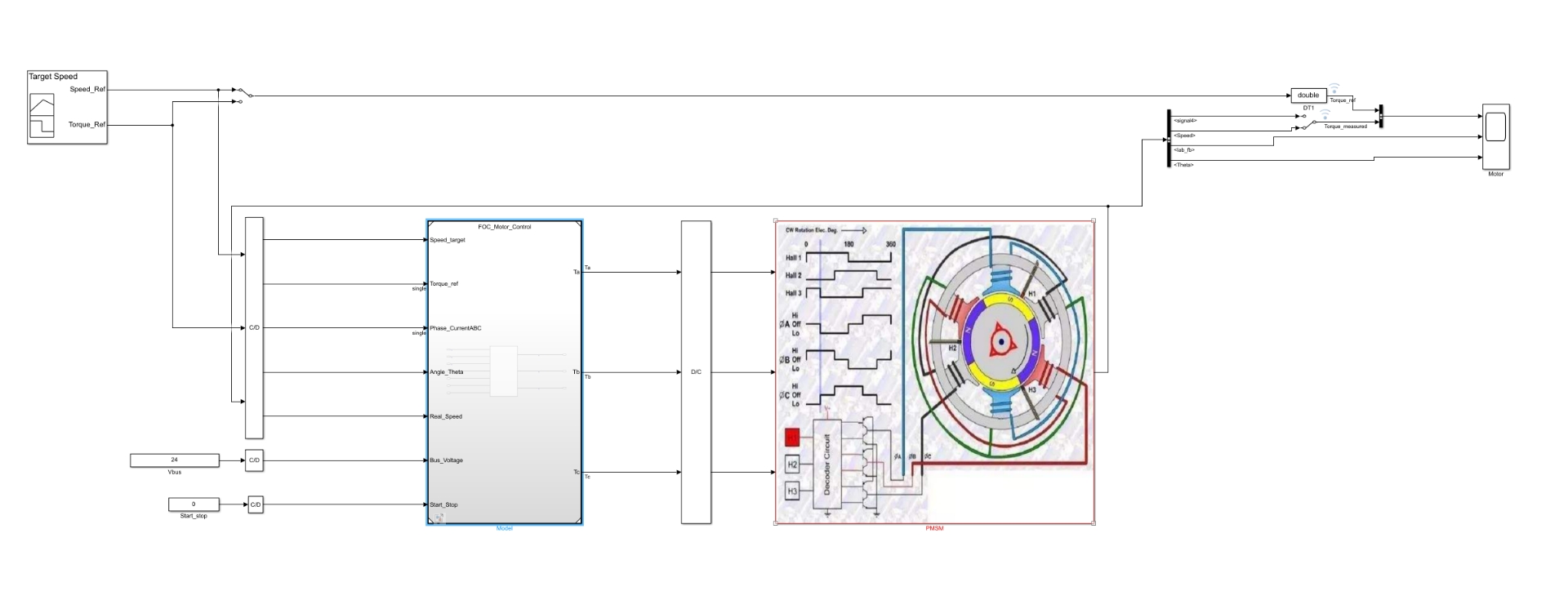
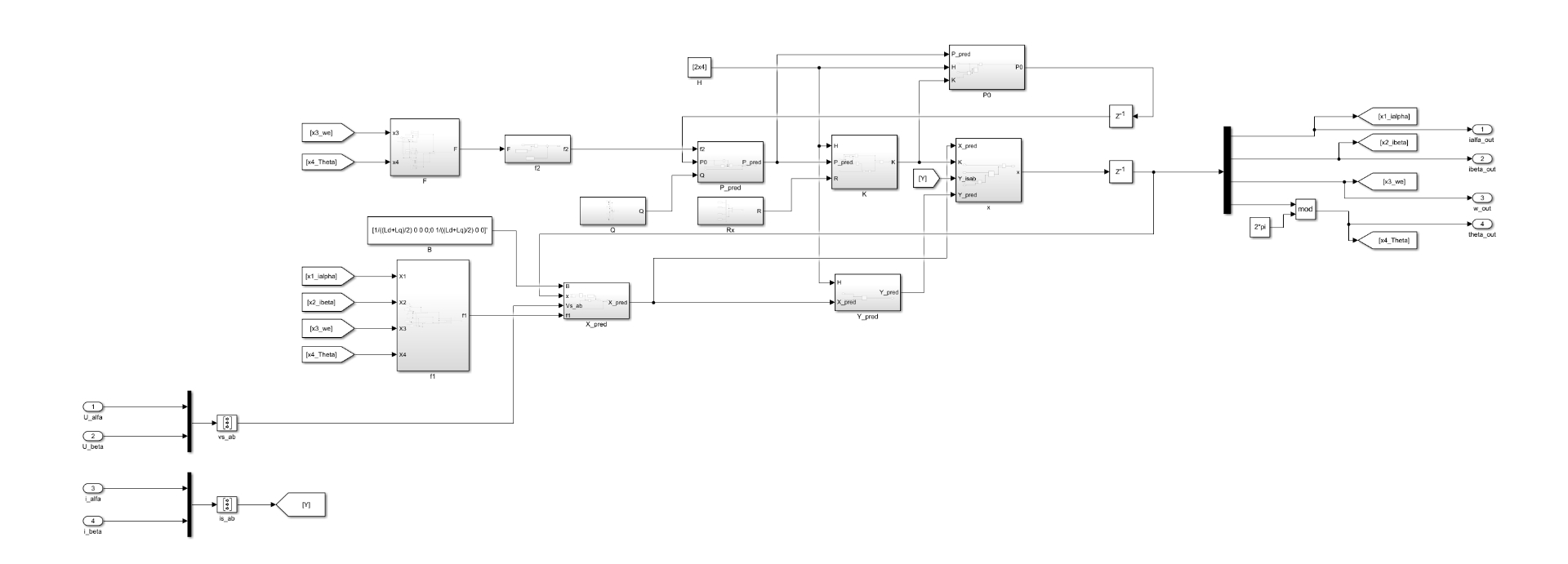
在STM32芯片上实现扩展卡尔曼滤波观测器,可以借助Simulink自动代码生成工具来快速地生成代码。Simulink是一种基于图形化编程的工具,它可以帮助开发人员快速地建立系统模型,并生成相应的C代码。通过Simulink工具的使用,我们可以方便地建立永磁同步电机的模型,并将其与扩展卡尔曼滤波器相结合,实现对传感器测量数据的滤波和状态估计。同时,Simulink还能将生成的代码与Keil集成开发环境进行无缝连接,进一步简化了工程的开发流程。
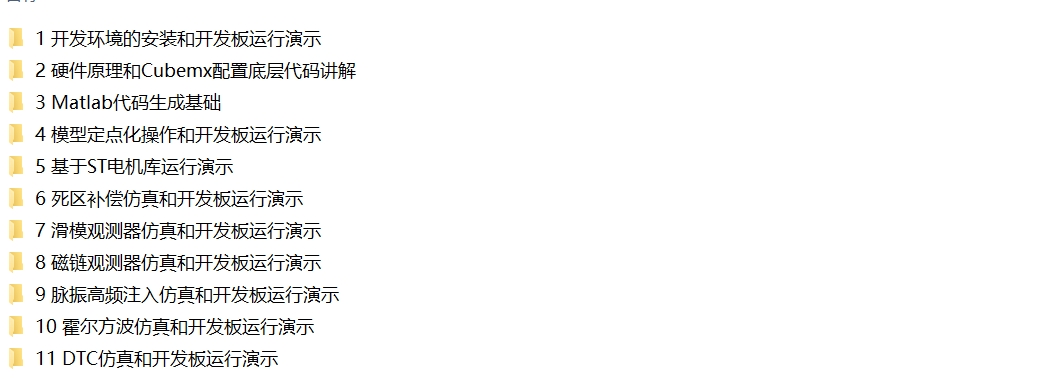
为了帮助读者更好地理解和应用扩展卡尔曼滤波观测器,本文还提供了相应的教学视频。通过观看教学视频,读者可以一步步了解如何使用Simulink工具建立永磁同步电机的模型,并生成相应的Keil集成工程和代码。视频中还将详细介绍扩展卡尔曼滤波器的原理和应用,以及在实际系统中的调试和优化技巧。通过视频的讲解和示范,读者可以更加直观地理解和掌握相关技术。
综上所述,本文围绕扩展卡尔曼滤波观测器在STM32芯片上的应用展开论述。通过Simulink自动代码生成工具和Keil集成开发环境的使用,结合永磁同步电机的模型,可以方便地实现对传感器测量数据的滤波和状态估计。同时,教学视频的提供也可以帮助读者更加深入地理解和应用相关技术。相信通过本文的阅读和学习,读者将能够在嵌入式系统开发中灵活运用扩展卡尔曼滤波观测器,并提高系统的性能和稳定性。
相关的代码,程序地址如下:http://wekup.cn/674236903980.html
















 674
674











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









