






前言
**动态规划(dynamic programming)**是运筹学的一个分支,是求解决策过程(decision
process)最优化的数学方法。20 世纪 50 年代初 R. E. Bellman 等人在研究多阶段决策过
程(multistep decision process)的优化问题时,提出了著名的最优性原理(principle of
optimality),把多阶段过程转化为一系列单阶段问题,逐个求解,创立了解决这类过程
优化问题的新方法—动态规划。1957 年出版了他的名著《Dynamic Programming》,这
是该领域的第一本著作。
动态规划问世以来,在经济管理、生产调度、工程技术和最优控制等方面得到了广
泛的应用。例如最短路线、库存管理、资源分配、设备更新、排序、装载等问题,用动
态规划方法比用其它方法求解更为方便。
虽然动态规划主要用于求解以时间划分阶段的动态过程的优化问题,但是一些与时
间无关的静态规划(如线性规划、非线性规划),只要人为地引进时间因素,把它视为
多阶段决策过程,也可以用动态规划方法方便地求解。
应指出,动态规划是求解某类问题的一种方法,是考察问题的一种途径,而不是
一种特殊算法(如线性规划是一种算法)。因而,它不象线性规划那样有一个标准的数
学表达式和明确定义的一组规则,而必须对具体问题进行具体分析处理。因此,在学习
时,除了要对基本概念和方法正确理解外,应以丰富的想象力去建立模型,用创造性的
技巧去求解。
一、简单说动态规划
上文说到动态规划是求解某类问题的一种方法,是考察问题的一种途径,而不是
一种特殊算法,其必须对具体问题进行具体分析处理。举个例子。
如上图,是一个线路网,连线上的数字表示两点之间的距离(或费用)。试寻求一条由 A
到G 距离最短(或费用最省)的路线。
动态规划首先要做的就是对整个过程进行自然划分,通常根据时间顺序或空间顺序特征来划分阶
段,以便按阶段的次序解优化问题,一般用下标k表示第k阶段,上述问题的阶段就是A,B,…,G,。其次,确定每个阶段初始时的状态和允许状态集合,分别用小写xk和大写Xk来表示,还是拿上述问题举例,第二阶段的状态就有B1、B2,第三阶段的状态就有C1、C2、C3、C4。然后当一个阶段的状态确定后,就要做出选择从而演变到下一阶段,这个叫决策,一般用uk表示,Uk则表示允许决策集合,比如当走到B1时,可是选择去C1、C2、C3,这就是决策。
确定好xk和uk等变量后,还需要确定一个状态转移方程和一个指标函数,前者用于更新状态,后者用于评估当前决策的好坏。上述问题的状态转移方程实际上就是一个关于xk的函数:xk+1=uk(xk),例如uk(B1)=C1,C2,C3。指标函数则是xk和uk(xk)间的数字,记为d(xk, uk(xk))。最后就是确定递归方程和自由终端条件了,一般都长这样:fk(xk)=min(d(xk, uk(xk)) + fk+1(xk+1)), fn+1(xn+1)=0
二、问题求解
1.最短路线问题
具体问题在上面,直接上代码:
# 状态变量x
# 允许状态集合X
X = {
1: (1,),
2: (1, 2),
3: (1, 2, 3, 4),
4: (1, 2, 3),
5: (1, 2, 3),
6: (1, 2),
7: (1,),
}
# 决策变量u
# 允许决策集合U
U = {
1: {1: (1, 2)},
2: {1: (1, 2, 3), 2: (2, 3, 4)},
3: {1: (1, 2), 2: (1, 2), 3: (2, 3), 4: (2, 3)},
4: {1: (1, 2), 2: (2, 3), 3: (2, 3)},
5: {1: (1, 2), 2: (1, 2), 3: (1, 2)},
6: {1: (1,), 2: (1,)},
7: {1: ()}
}
# 状态转移方程
# 阶段指标v和指标函数V
v = {
1: {1: (5, 3)},
2: {1: (1, 3, 6), 2: (8, 7, 6)},
3: {1: (6, 8), 2: (3, 5), 3: (3, 3), 4: (8, 4)},
4: {1: (2, 2), 2: (1, 2), 3: (3, 3)},
5: {1: (3, 5), 2: (5, 2), 3: (6, 6)},
6: {1: (4,), 2: (3,)},
7: {1: (0,)}
}
# 递归方程
def f(k, xk):
if k == len(v):
return 0, [(7, 1), ]
min = 1e06
for idx, x in enumerate(U[k][xk]):
tmp = v[k][xk][idx] + f(k + 1, x)[0]
if tmp < min:
xx = x
min = tmp
return min, [(k, xk), ] + f(k + 1, xx)[1]
R = f(2, 2)
print(f"最短路径为:{R[1][0]}", end='')
for r in R[1][1:]:
print(f"-->{r}", end='')
print(f", 最短距离为{R[0]}")
结果展示:

2.生产计划问题
工厂生产某种产品,每单位(千件)的成本为 1(千元),每次开工的固定成本为 3
(千元),工厂每季度的最大生产能力为 6(千件)。经调查,市场对该产品的需求量第
一、二、三、四季度分别为 2,3,2,4(千件)。如果工厂在第一、二季度将全年的需
求都生产出来,自然可以降低成本(少付固定成本费),但是对于第三、四季度才能上
市的产品需付存储费,每季每千件的存储费为 0.5(千元)。还规定年初和年末这种产品
均无库存。试制定一个生产计划,即安排每个季度的产量,使一年的总费用(生产成本
和存储费)最少。
上代码:
# 状态变量x
# 允许状态集合X
X = {
0: [0],
1: [],
2: [],
3: [],
4: [0]
}
# 决策变量u
# 允许决策集合U
U = [0, 1, 2, 3, 4, 5, 6]
# 状态转移方程
d = [2, 3, 2, 4]
for k in range(4)[::-1][:-1]:
for u in U:
for xk_1 in X[k + 1]:
tmp = xk_1 + d[k] - u
if tmp >= 0 and tmp not in X[k]:
X[k].append(tmp)
# 阶段指标v和指标函数V
def v(k, xk, uk):
if uk > 0:
return 0.5 * xk + 3 + uk
else:
return 0.5 * xk
# 递归方程
def f(k, xk):
assert xk in X[k]
if k == len(X) - 1:
assert xk == 0
return 0, [(len(X), -1), ]
min = 1e06
for xk_1 in X[k + 1]:
uk = xk_1 + d[k] - xk
if uk < 0 or uk > 6:
continue
tmp = v(k, xk, uk) + f(k + 1, xk_1)[0]
if tmp < min:
xxk_1 = xk_1
u = uk
min = tmp
return min, [(k + 1, u), ] + f(k + 1, xxk_1)[1]
R = f(0, 0)
for k, r in enumerate(R[1][:-1]):
print(f"第{k + 1}季度生产{r[1]}")
print(f"最少费用为{R[0]}")
结果展示:

3.资源分配问题
设某工厂有 1000 台机器,生产两种产品 A、B ,若投入 x 台机器生产 A 产品,则纯收入为5x ,若投入 y 台机器生产 B 种产品,则纯收入为4y ,又知:生产 A 种产品机器的年折损率为 20%,生产 B 产品机器的年折损率为 10%,问在 5 年内如何安排各年度的生产计划,才能使总收入最高?
上代码:
# 状态变量x
# 允许状态集合X
X = {
0: [1000],
1: [],
2: [],
3: [],
4: [],
}
# 决策变量u
# 允许决策集合U
U = list(range(1001))
# 状态转移方程
# xk_1 = 0.9 * xk - 0.1 * uk
# 阶段指标v和指标函数V
def v(k, xk, uk):
return uk + 4 * xk
# 递归方程
def f(k, xk):
if k == len(X):
return 0, [(len(X), -1, -1), ]
max = 0
for uk in [0, xk]:
if uk < 0 or uk > xk:
continue
xk_1 = 0.9 * xk - 0.1 * uk
tmp = v(k, xk, uk) + f(k+1, xk_1)[0]
if tmp > max:
u = uk
xxk_1 = xk_1
max = tmp
return max, [(k, u, xk), ] + f(k+1, xxk_1)[1]
R = f(0, 1000)
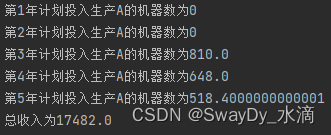
for k, r in enumerate(R[1][:-1]):
print(f"第{k + 1}年计划投入生产A的机器数为{r[1]}")
print(f"总收入为{R[0]}")
结果展示:
总结
以上就是今天要讲的内容,本文仅仅简单介绍了动态规划,而动态规划其实是一种非常需要丰富想象力,创造力的解决问题的方式,只有深刻理解了相关的概念才能在实际问题中得心应手。一起加油吧!















 582
582











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









