






线性自抗扰(LADRC)的stm32f1程序,实现用编码器反馈控制直流电机调速,控制器采用加了TD的LADRC,控制效果良好,.h和.c分开,代码清晰有注释。
有调试说明
YID:1235653714412755
tbNick_9w978
标题:基于STM32F1的线性自抗扰控制器编码器反馈直流电机调速实现
摘要:本文介绍了一种基于STM32F1的线性自抗扰控制(Linear Active Disturbance Rejection Control,LADRC)方法,实现了编码器反馈控制直流电机的调速。该控制器采用了添加了时域差分(TD)的LADRC算法,通过对电机的速度和位置进行估计与调整,实现了良好的控制效果。代码采用.h和.c分离的形式,具有清晰的结构和详细的注释。此外,本文还提供了调试说明,帮助读者更好地理解和使用该控制器。
-
引言
直流电机的调速控制是自动化领域中常见的任务之一。传统的PID控制器在应对复杂的非线性扰动和参数变化时表现出一定的局限性,为了进一步提高控制的鲁棒性和精度,线性自抗扰控制(LADRC)算法被广泛应用。本文介绍了一种基于STM32F1的LADRC控制器,通过编码器反馈对直流电机进行调速控制。 -
原理与方法
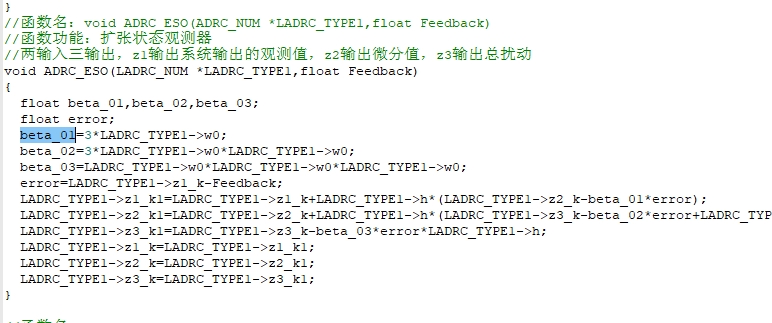
LADRC控制器是一种前馈控制算法,通过对扰动的实时估计和补偿,将系统的动态特性线性化,从而实现更好的鲁棒性和抗干扰能力。本文采用了添加了时域差分(TD)的LADRC算法,通过将差分项加入控制器的计算过程中,提高了系统的稳定性和响应速度。 -
硬件设计与实现
本文选用了STM32F1作为硬件平台,利用其丰富的IO接口和强大的计算能力,实现了LADRC控制器的设计与实现。编码器作为反馈传感器,将电机的位置和速度信息反馈给控制器,控制器则根据LADRC算法进行计算和调整。 -
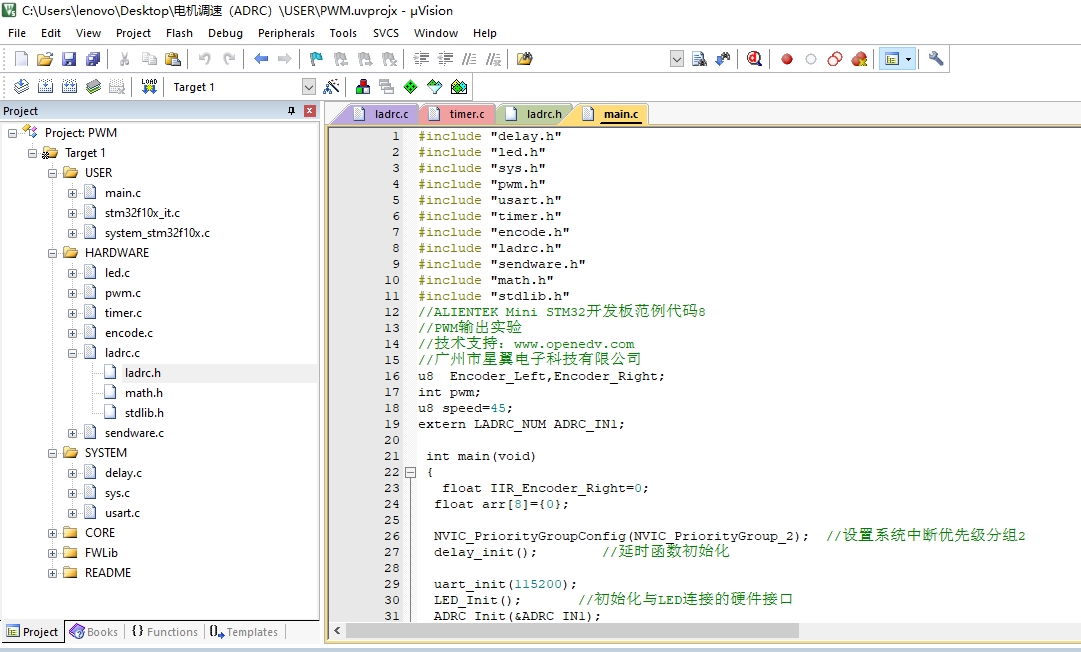
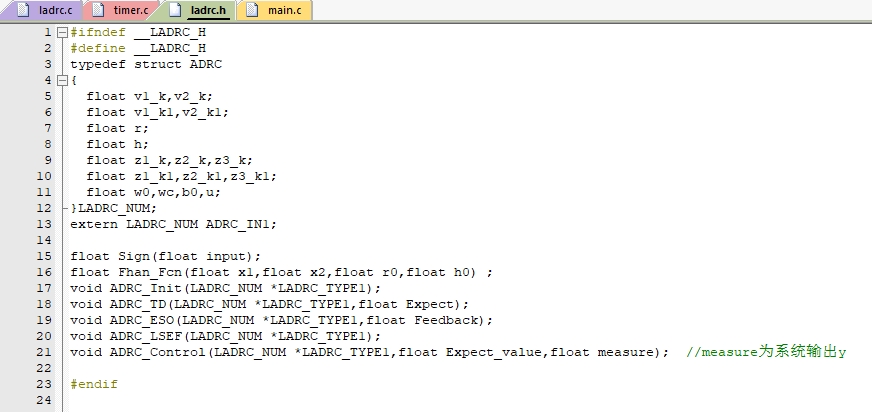
软件设计与实现
代码的结构非常清晰,将头文件(.h)与源文件(.c)分开,便于阅读和维护。对代码中的每一部分都有详细的注释,使得读者能够快速理解其功能和作用。 -
调试说明
为了帮助读者更好地理解和使用该控制器,本文提供了详细的调试说明。通过对控制器参数的调整和系统响应的观察,读者可以进一步优化控制效果,并在实际应用中取得更好的性能。 -
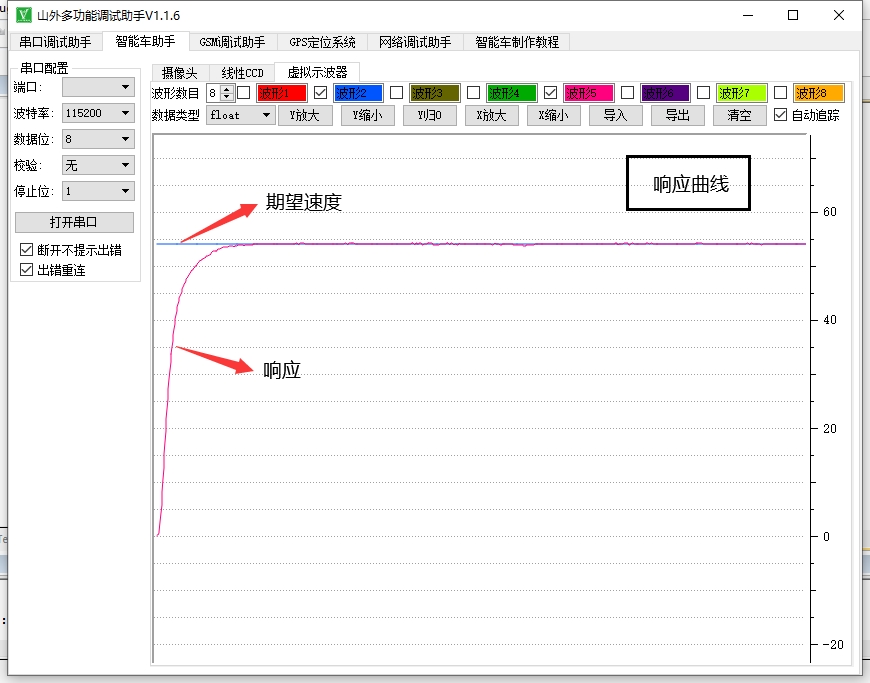
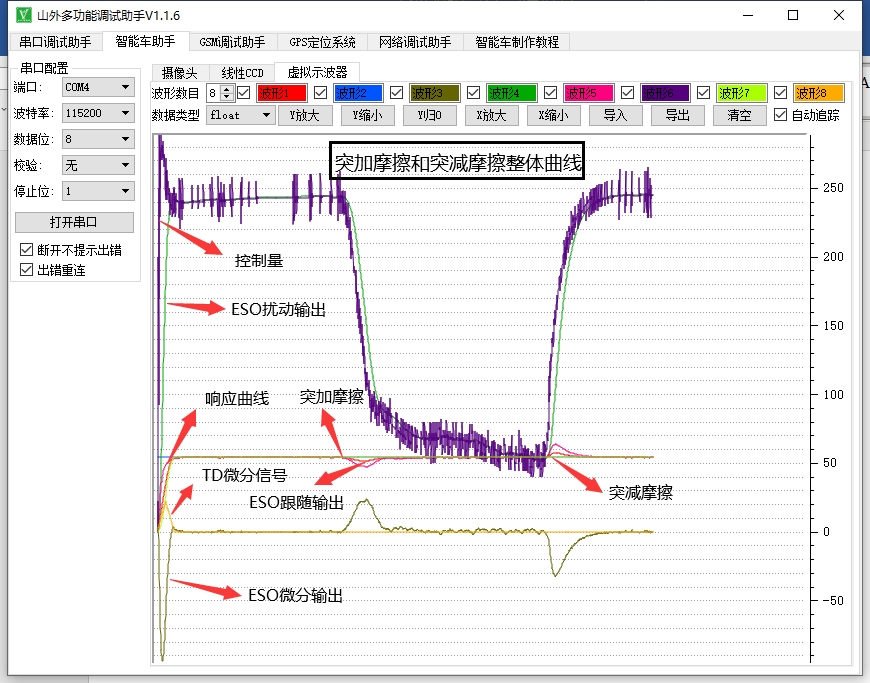
实验结果与讨论
通过对实际电机的测试,本文验证了基于STM32F1的LADRC控制器的有效性和鲁棒性。控制器能够实现精确的调速控制,并对扰动和参数变化表现出较好的抑制能力。 -
结论
本文介绍了一种基于STM32F1的线性自抗扰控制器编码器反馈直流电机调速实现方法。该控制器采用了添加了时域差分(TD)的LADRC算法,并在硬件和软件上进行了详细的实现和调试。实验结果表明,该控制器具有良好的控制效果和鲁棒性,可在直流电机调速控制中得到广泛应用。
关键词:线性自抗扰控制、LADRC、STM32F1、编码器反馈、直流电机调速
注:本文的LADRC控制器代码和调试说明可在作者的GitHub仓库中获取,详细地址可查看作者的社区博客页面。
以上相关代码,程序地址:http://wekup.cn/653714412755.html















 6168
6168

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









