







永磁同步电机(pmsm,无位置传感器控制(扩张状态观测器,超螺旋滑模,扩展卡尔曼滤波)
脉振高频注入(有方波和正弦两种)仿真模型。
可以带负载 书上的模型不能带
弱磁控制有电压弱磁和超前角弱磁
ID:2765648813253340
南瓜星忠心的奶酪

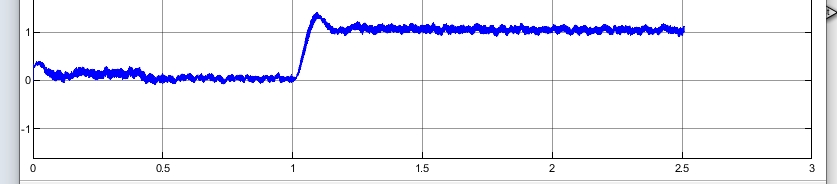
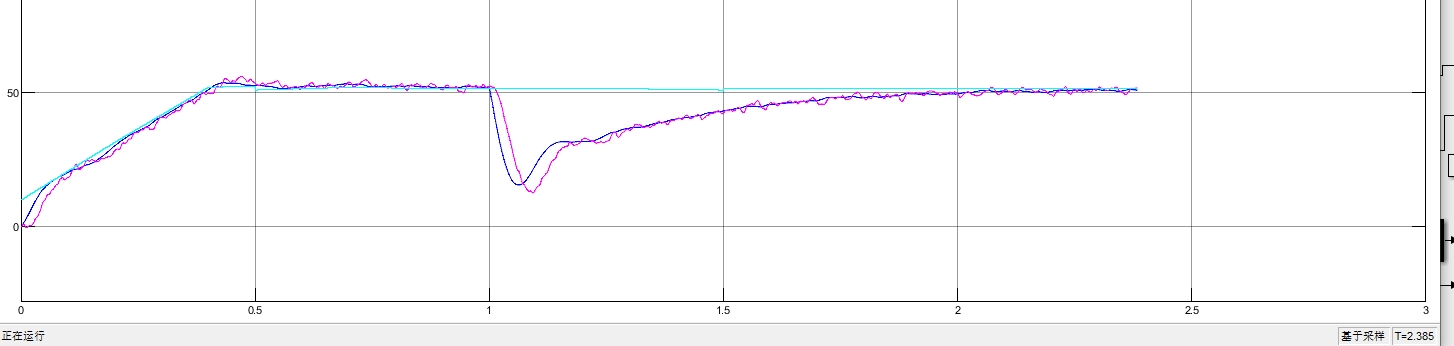
永磁同步电机(PMSM)是一种高效、高性能的电机,广泛应用于工业、交通、家电等领域。在PMSM控制中,传统的位置传感器控制方法存在成本高、易损坏、维护复杂等问题。因此,无位置传感器控制方法被广泛应用于PMSM控制系统中。本文将介绍一种基于扩展状态观测器(ESO)和超螺旋滑模控制的无位置传感器控制方法,并结合扩展卡尔曼滤波(EKF)进行仿真模型研究。此外,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 266
266

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









