






 本文详细讨论了永磁同步电机在低速下的数学模型,重点介绍了坐标变换、高频响应电流计算以及利用外差法提取转子位置的方法。通过简单的外差法处理,结合低通滤波器,最终实现转子位置的估计。
本文详细讨论了永磁同步电机在低速下的数学模型,重点介绍了坐标变换、高频响应电流计算以及利用外差法提取转子位置的方法。通过简单的外差法处理,结合低通滤波器,最终实现转子位置的估计。
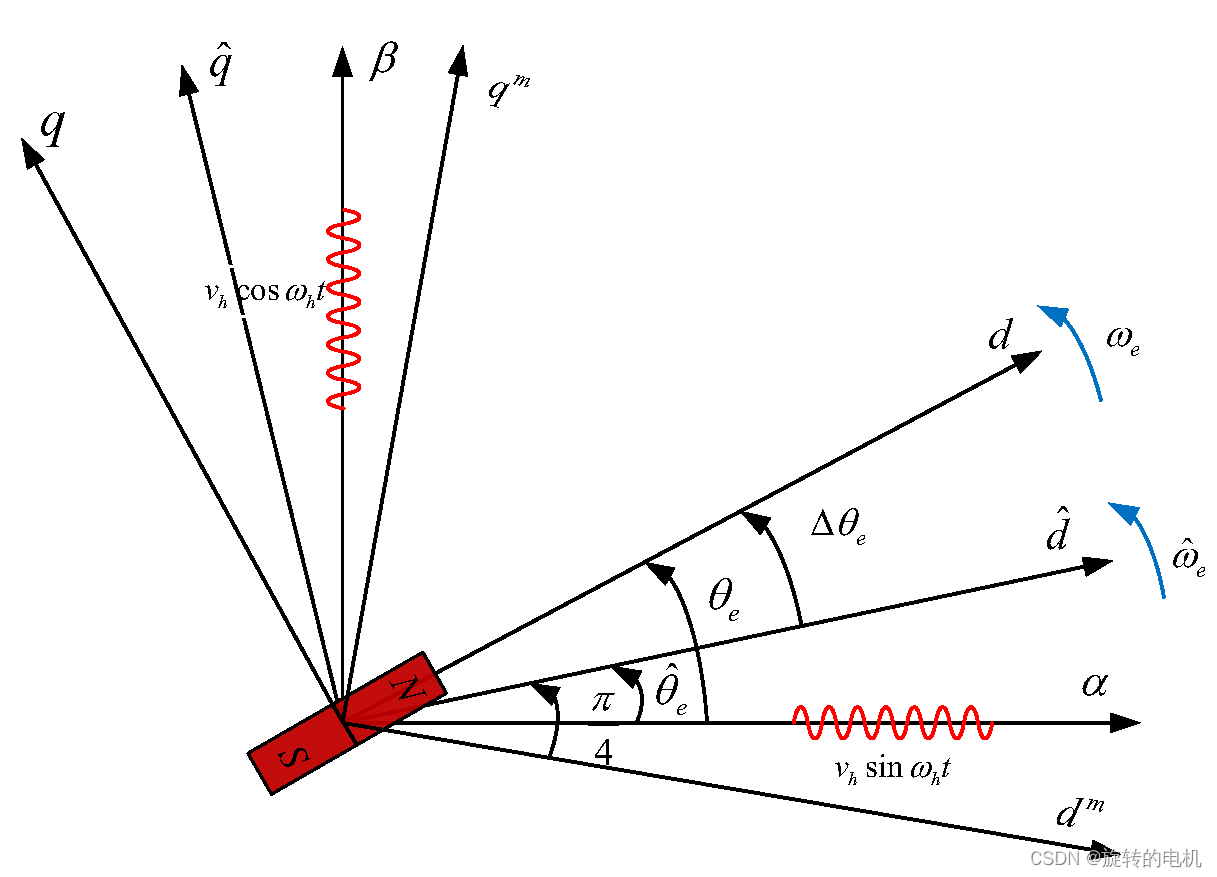
图1 几种坐标系关系
永磁同步迪电机在零低速下数学模型可以看成一个纯电感模型(忽略反电势(反电势信噪比低,占比低)、电阻压降(在高频信号激励下,电阻压降占比远小于电感压降))
(1)
定义坐标变换
(2)
注:逆时针旋转,相当于左乘一个 矩阵;顺时针旋转,相当于相当于左乘一个
矩阵。
坐标系顺时针旋转
角度到
坐标系,对于电压,则有
(3)
式(3)中,,
。
则式(3)可以变为
(4)
注入的正弦波形式为
(5)
将式(5)带入式(4)可得则坐标系下高频响应电流为
(6)
式(6)中,。接下来需要从高频响应电流中提取出角度
,本文采取较为简单的外差法解耦转子位置(不采用同步轴系滤波器,太复杂,容易绕晕),如图2所示。
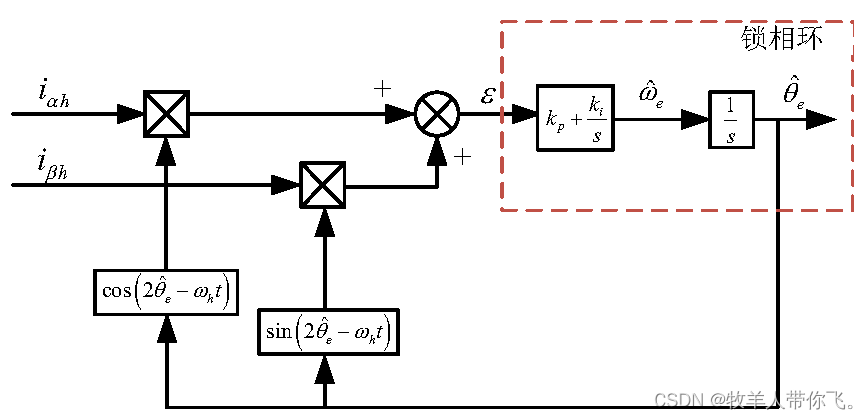
图2 外差法转子位置提取法
(7)
式子(7)第一项为高频分量,第二项为我们所需要的转子位置误差项,此时仅需要一个低通滤波器便可以滤除第一项,得到第二项(当然这也是忽略了LPF给第二项带来的角度延迟与幅值衰减,也有更好的算法解决这个延迟问题,需要自己去研究设计)。
第二项可以近似为(系统进入稳态,)
(8)
式(8)中,。
之后就是老生常谈的锁相环环节,最终可以得到估计角度信息。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









