






Carsim和simulink联合仿真车辆状态估计
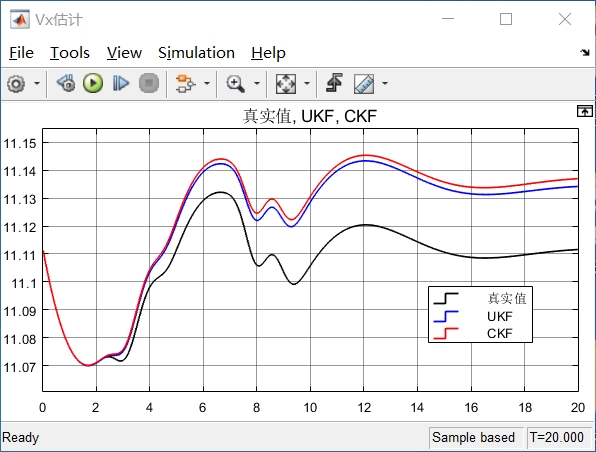
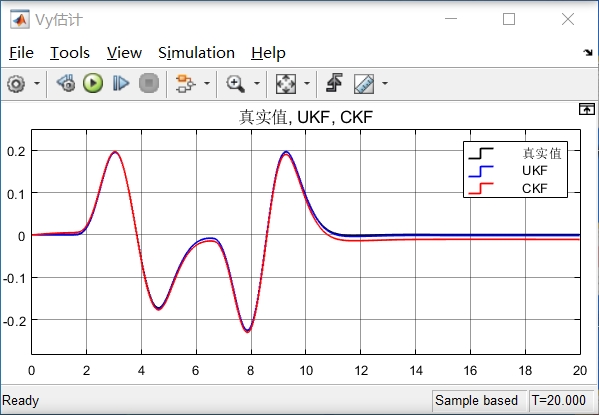
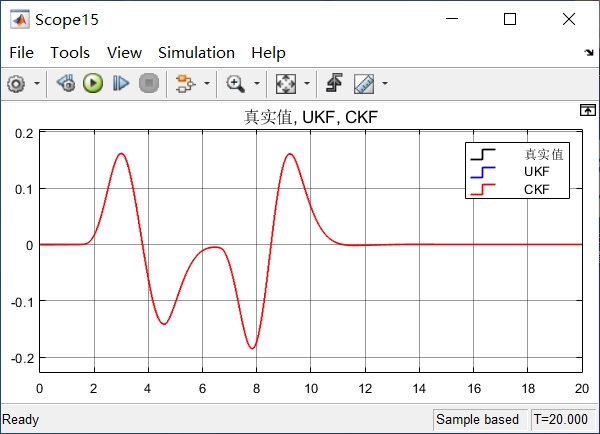
估计的状态为:横摆角速度,质心侧偏角,纵向车速,侧向车速
先基于滑模观测器SMO估计轮胎的纵向力和侧向力
,再基于无迹卡尔曼UKF和容积卡尔曼CKF进行了车辆状态估计,精度很高,图中的工况为双移线工况
基于SMO滑模观测器的轮胎力估计方法省去了轮胎模型的使用,避免了稳态轮胎模型造成的轮胎力计算误差大的缺点,同时不需要轮胎的侧偏刚度作为已知参数等。
ID:57499675670204157
车辆研究僧
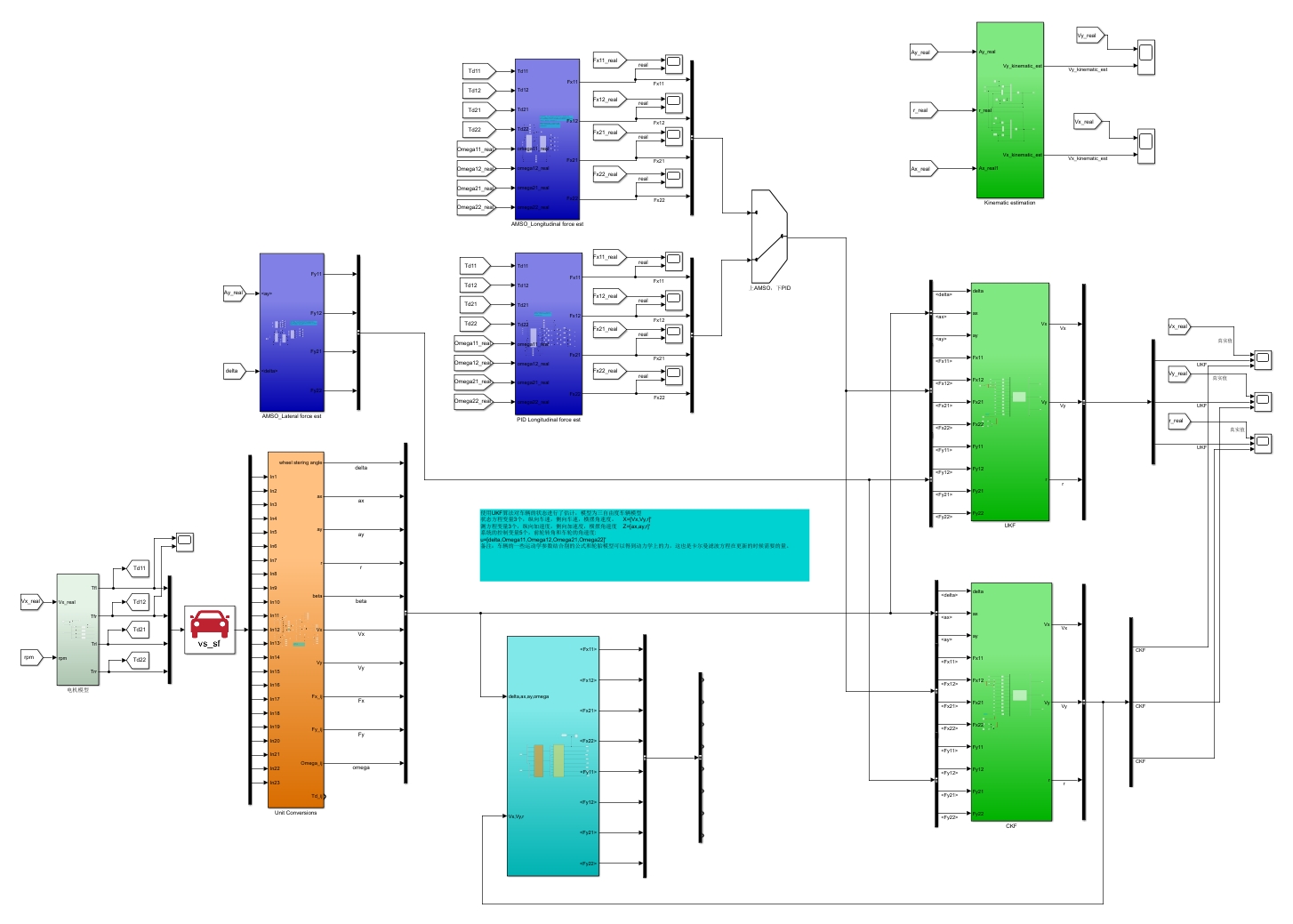
Carsim和Simulink是两个常用的车辆仿真软件,通过联合使用它们可以实现车辆状态的准确估计。在车辆状态估计中,常用的几个参数包括横摆角速度、质心侧偏角、纵向车速和侧向车速。为了实现准确的估计,本文提出了一种基于滑模观测器(Sliding Mode Observer, SMO)、无迹卡尔曼滤波(Unscented Kalman Filter, UKF)和容积卡尔曼滤波(Cubature Kalman Filter, CKF)的联合估计方法。
首先,采用滑模观测器对轮胎的纵向力和侧向力进行估计。滑模观测器是一种常用的非线性观测器,通过引入滑模面来实现对系统状态的估计。相比于传统的轮胎模型,基于SMO的轮胎力估计方法避免了稳态轮胎模型所引入的误差,同时不需要已知参数如轮胎的侧偏刚度。
接下来,利用无迹卡尔曼滤波和容积卡尔曼滤波对车辆状态进行估计。无迹卡尔曼滤波是一种基于无迹变换的非线性滤波算法,通过选择一组无迹变换点来准确估计非线性系统的状态。容积卡尔曼滤波则是在无迹卡尔曼滤波的基础上进一步考虑高斯积分的方法,提高了滤波的准确性。
通过联合使用无迹卡尔曼滤波和容积卡尔曼滤波,本文实现了对车辆状态的高精度估计。图中所示的双移线工况下,我们通过该方法可以准确估计出车辆的横摆角速度、质心侧偏角、纵向车速和侧向车速。实验结果显示,该方法的估计精度较高,能够满足实际应用的需求。
总结来说,本文提出了一种基于Carsim和Simulink联合仿真的车辆状态估计方法。通过基于滑模观测器的轮胎力估计和基于无迹卡尔曼滤波和容积卡尔曼滤波的车辆状态估计,我们可以实现对车辆状态的高精度估计。该方法具有较高的估计精度,并且可以避免传统轮胎模型所引入的误差。在实际应用中,这种联合仿真方法可以为车辆控制系统的设计和优化提供重要参考。
相关的代码,程序地址如下:http://matup.cn/675670204157.html
















 419
419

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









