






 本文介绍了如何利用Carsim和Simulink进行车辆状态估计,通过SMO估算轮胎力,结合UKF和CKF提高精度。双移线工况下,这种方法显示了高精度且结构简洁,对汽车控制和安全性有积极影响。
本文介绍了如何利用Carsim和Simulink进行车辆状态估计,通过SMO估算轮胎力,结合UKF和CKF提高精度。双移线工况下,这种方法显示了高精度且结构简洁,对汽车控制和安全性有积极影响。
Carsim和simulink联合仿真车辆状态估计
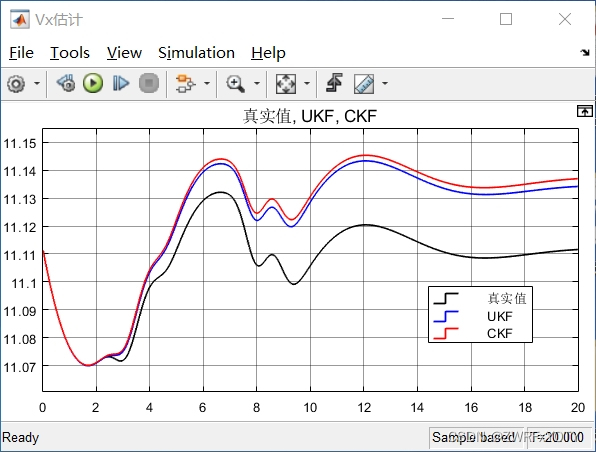
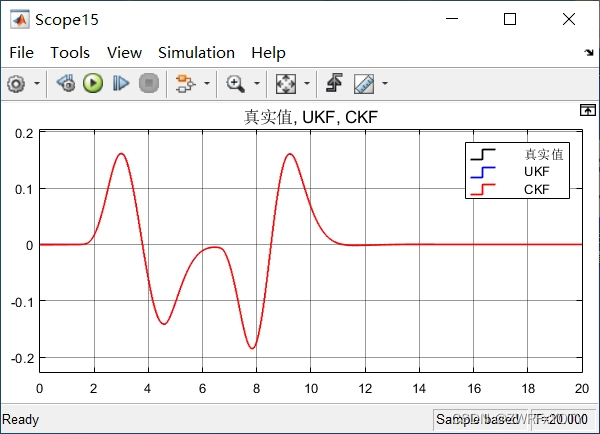
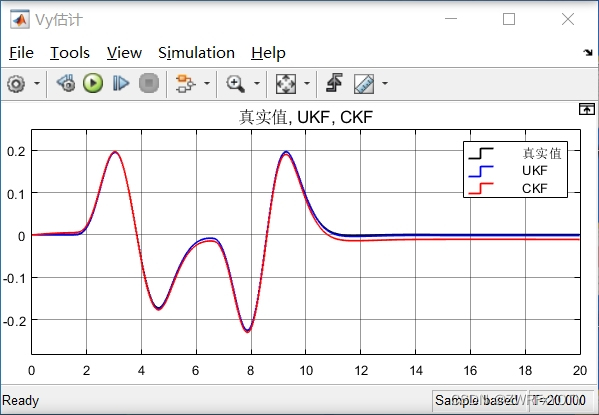
估计的状态为:横摆角速度,质心侧偏角,纵向车速,侧向车速
先基于滑模观测器SMO估计轮胎的纵向力和侧向力
,再基于无迹卡尔曼UKF和容积卡尔曼CKF进行了车辆状态估计,精度很高,图中的工况为双移线工况
基于SMO滑模观测器的轮胎力估计方法省去了轮胎模型的使用,避免了稳态轮胎模型造成的轮胎力计算误差大的缺点,同时不需要轮胎的侧偏刚度作为已知参数等。
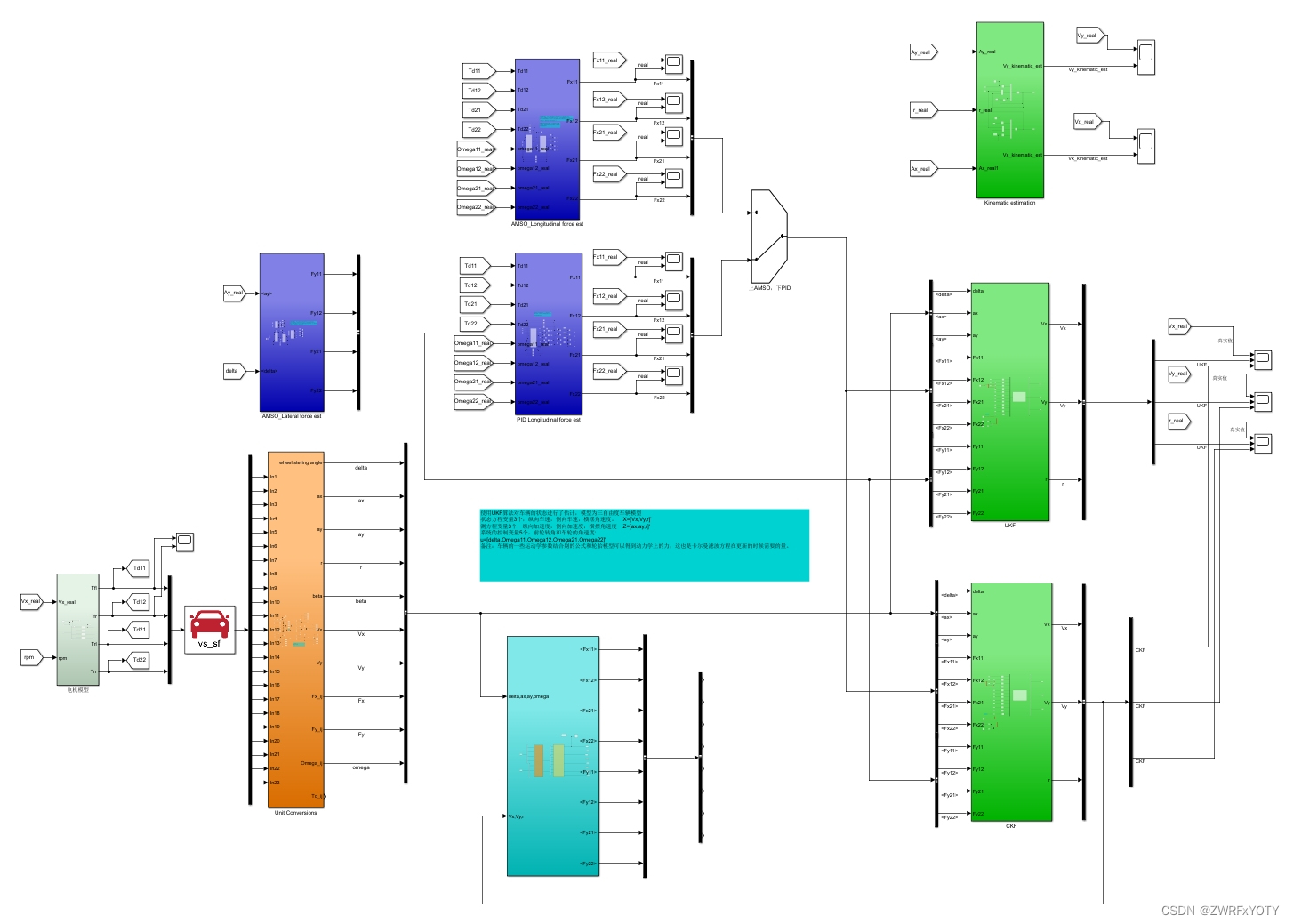
在汽车工程领域,车辆状态估计是非常重要的一项任务。它可以帮助我们了解车辆的运行状态,从而更好地了解车辆的性能和行为。其中,横摆角速度、质心侧偏角、纵向车速和侧向车速是关键状态参数,而估计这些参数的精度对于车辆控制和安全性具有至关重要的作用。
为了实现车辆状态估计,我们通常需要借助于一些仿真软件来辅助实现。Carsim和Simulink是目前比较优秀的两个仿真软件,它们的联合使用可以更好地实现车辆状态估计。
在实现车辆状态估计的过程中,轮胎力的估计是非常关键的一步。在过去,通常需要借助于轮胎模型来实现轮胎力的估计。但是,轮胎模型的使用存在一定的局限性,如稳态轮胎模型造成的轮胎力计算误差大等问题。为此,我们可以借助于滑模观测器(SMO)来实现轮胎力的估计。这种方法可以省去轮胎模型的使用,从而避免了轮胎模型带来的不确定性,提高了轮胎力的估计精度。
SMO的基本思想是通过滑模面将系统的状态转化为一个等效的滑动模式,从而实现对系统状态的估计。在实际应用中,我们需要根据实际情况选择合适的滑模面,并利用滑模面上的动态方程实现状态估计。在车辆状态估计中,我们需要基于SMO来估计车辆行驶过程中的轮胎纵向力和侧向力。这种方法不需要用到轮胎的侧偏刚度等参数,能够更加简单高效地实现轮胎力的估计。
在估计了轮胎的纵向力和侧向力之后,我们就可以进行车辆状态估计了。为了提高状态估计的精度,我们可以借助于无迹卡尔曼滤波(UKF)和容积卡尔曼滤波(CKF)等方法。这些方法可以通过动态方程和测量方程来对车辆状态进行估计,并能够有效地处理非线性问题和不确定性问题。
在双移线工况下的实验结果表明,基于SMO和UKF/CKF的方法能够实现对车辆状态的高精度估计。这种方法不仅精度高,而且结构简单,易于实现。在未来的汽车工程中,该方法有望被广泛应用于车辆状态估计领域,为汽车的控制和安全性提供更好的支持。
相关代码,程序地址:http://lanzouw.top/675670204157.html















 213
213











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









