







欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。
一项目简介
一、项目背景与意义
随着高速公路网的迅速扩展和交通流量的不断增加,有效管理道路速度和确保交通安全成为一项重要任务。本项目旨在利用计算机视觉和机器学习技术,基于Python、dlib和OpenCV库,开发一个系统来检测多车道公路上的车辆速度,为交通管理部门提供实时、准确的车辆速度数据,以实现超速预警、拥堵分析等功能,从而增强道路安全和通行效率。
二、技术框架与工具
Python:作为项目的编程语言,提供丰富的库和工具,方便数据处理和算法实现。
dlib:dlib是一个包含机器学习算法的C++库,用于图像处理和计算机视觉任务,特别是其目标跟踪功能在车辆速度检测中起到关键作用。
OpenCV:一个开源的计算机视觉库,提供了图像处理、目标检测、特征提取等功能,是本项目中的核心库。
三、系统组成与工作原理
视频读取:
使用OpenCV的VideoCapture类从监控摄像头读取视频流。
车辆检测:
利用OpenCV中的背景差分法或dlib中的机器学习算法(如HOG+SVM)来检测视频中的车辆。
结合图像预处理技术(如灰度化、滤波、二值化等)提高车辆检测的准确性。
车辆跟踪:
采用dlib中的Correlation Tracker或其他先进的跟踪算法(如KLT跟踪器、深度学习跟踪器)对检测到的车辆进行跨帧跟踪。
跟踪算法能够确保即使在车辆短暂消失或遮挡后,也能重新捕获并跟踪车辆。
速度计算:
通过分析车辆在连续帧之间的位移和帧间时间差来计算车辆的瞬时速度。
根据摄像头的参数(如焦距、像素与实际距离的比例)将像素位移转换为实际距离。
结果输出与可视化:
将计算得到的车辆速度信息叠加到原视频上,实时显示给监控人员。
可以将速度数据保存到数据库或云端,以供后续分析和管理。
四、项目特点与优势
实时性:采用高效的图像处理算法和优化的代码实现,确保对车辆速度的实时检测和计算。
准确性:结合多种检测算法和跟踪算法,提高车辆检测和速度计算的准确性。
鲁棒性:通过图像预处理和算法优化,确保系统在不同光照、天气和路况条件下的稳定性。
可扩展性:系统采用模块化设计,便于后续添加其他功能或优化算法。
易用性:提供简洁的用户界面和交互方式,方便用户进行车辆速度数据的查看和管理。
二、功能
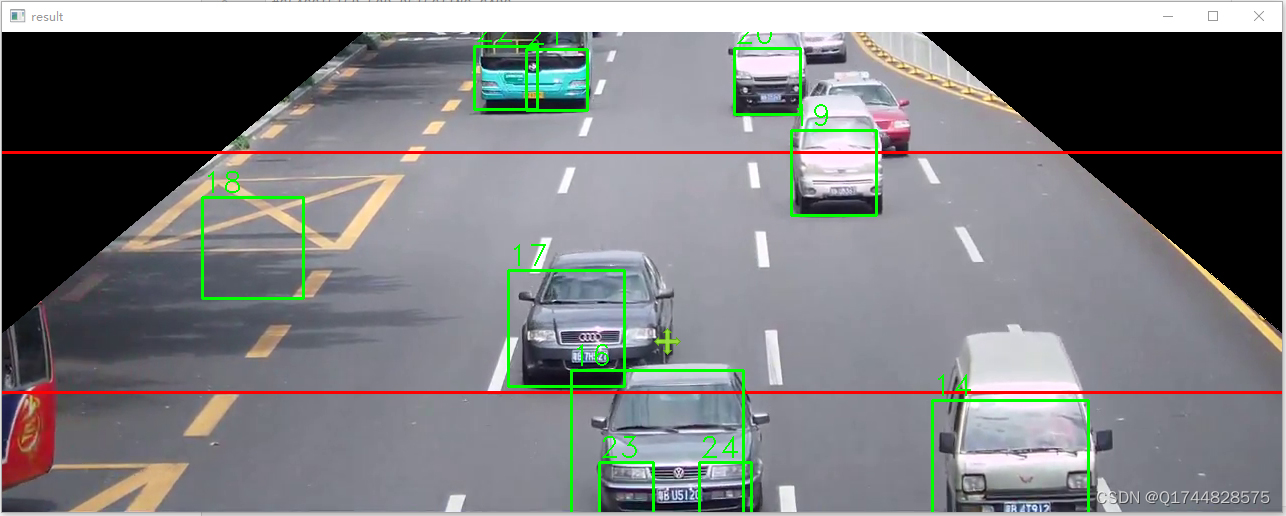
基于Python+dlib+OpenCV检测多车道公路上的车辆速度
三、系统
四. 总结
通过本项目的实施,交通管理部门将能够实时获取多车道公路上的车辆速度数据,有效实现超速预警、拥堵分析等功能,提高道路安全和通行效率。同时,该项目也为智能交通系统的发展提供了有力支持,推动计算机视觉和机器学习技术在交通管理领域的应用。















 1715
1715

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









