







欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。
一项目简介
一、项目背景与意义
随着交通流量的增加和高速公路的快速发展,高速公路上的车辆速度管理成为了保障道路安全和提升通行效率的重要手段。传统的测速方法,如雷达测速和地感线圈测速,虽然准确但成本较高且安装维护复杂。近年来,基于视频分析的车辆速度检测方法因其成本低廉、安装便捷而备受关注。本项目利用Python编程语言结合OpenCV(开源计算机视觉库)实现一个高速公路行驶车辆的速度检测与跟踪系统。
二、系统概述
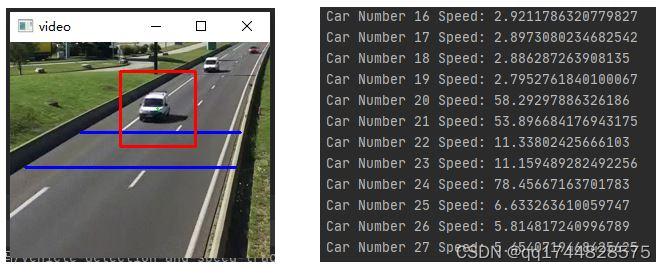
该系统主要利用高速公路上的监控摄像头拍摄的视频流作为输入,通过图像处理和计算机视觉技术,实时检测并计算车辆的速度。系统主要包括以下几个模块:
视频读取:使用OpenCV的VideoCapture类读取监控摄像头的视频流。
车辆检测:采用背景差分法、帧间差分法或基于深度学习的目标检测算法(如YOLO、SSD等)来检测视频中的车辆。
车辆跟踪:通过光流法、KLT跟踪器或深度学习中的Siamese网络等方法,对检测到的车辆进行跨帧跟踪,以便计算速度。
速度计算:根据车辆在相邻帧之间的位移和帧间时间差,计算车辆的瞬时速度。
结果展示:将计算得到的车辆速度信息叠加到原视频上,实时显示给监控人员,同时可以将数据保存到数据库或云端以供后续分析。
三、技术难点及解决方案
车辆检测的准确性:在复杂场景下,如光照变化、阴影、遮挡等情况下,如何提高车辆检测的准确性。解决方案包括结合多种检测方法,如背景差分法和深度学习算法,提高检测的准确性和鲁棒性。
车辆跟踪的稳定性:在车辆密集、快速移动或交叉变道等情况下,如何保持车辆跟踪的稳定性。通过引入深度学习中的目标跟踪算法,提高跟踪的稳定性和准确性。
速度计算的精度:如何准确计算车辆的瞬时速度,特别是在高速移动的情况下。通过校准摄像头和参数调整,减少误差,提高速度计算的精度。
四、系统功能
该系统不仅可以实时检测并计算车辆的速度,还可以实现以下功能:
超速预警:当检测到车辆速度超过预设阈值时,系统自动发出预警信息。
拥堵分析:通过分析车辆速度数据,判断道路拥堵情况,为交通管理部门提供决策支持。
数据存储与分析:将车辆速度数据保存到数据库或云端,以便后续进行数据挖掘和分析。
二、功能
基于Python+OpenCV车辆检测与速度跟踪系统
三、系统
四. 总结
基于Python+OpenCV的车辆检测与速度跟踪系统可以广泛应用于高速公路、城市道路等交通场景,为交通管理部门提供实时的车辆速度数据,有助于实现超速预警、拥堵分析等功能,提高道路安全和通行效率。同时,该系统也可以作为智能交通系统的重要组成部分,为智慧城市建设提供有力支持。















 718
718

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









