1.map和set底层调用的红黑树的实现
有不清楚的地方,参考AVL树的模拟实现和红黑树的模拟实现
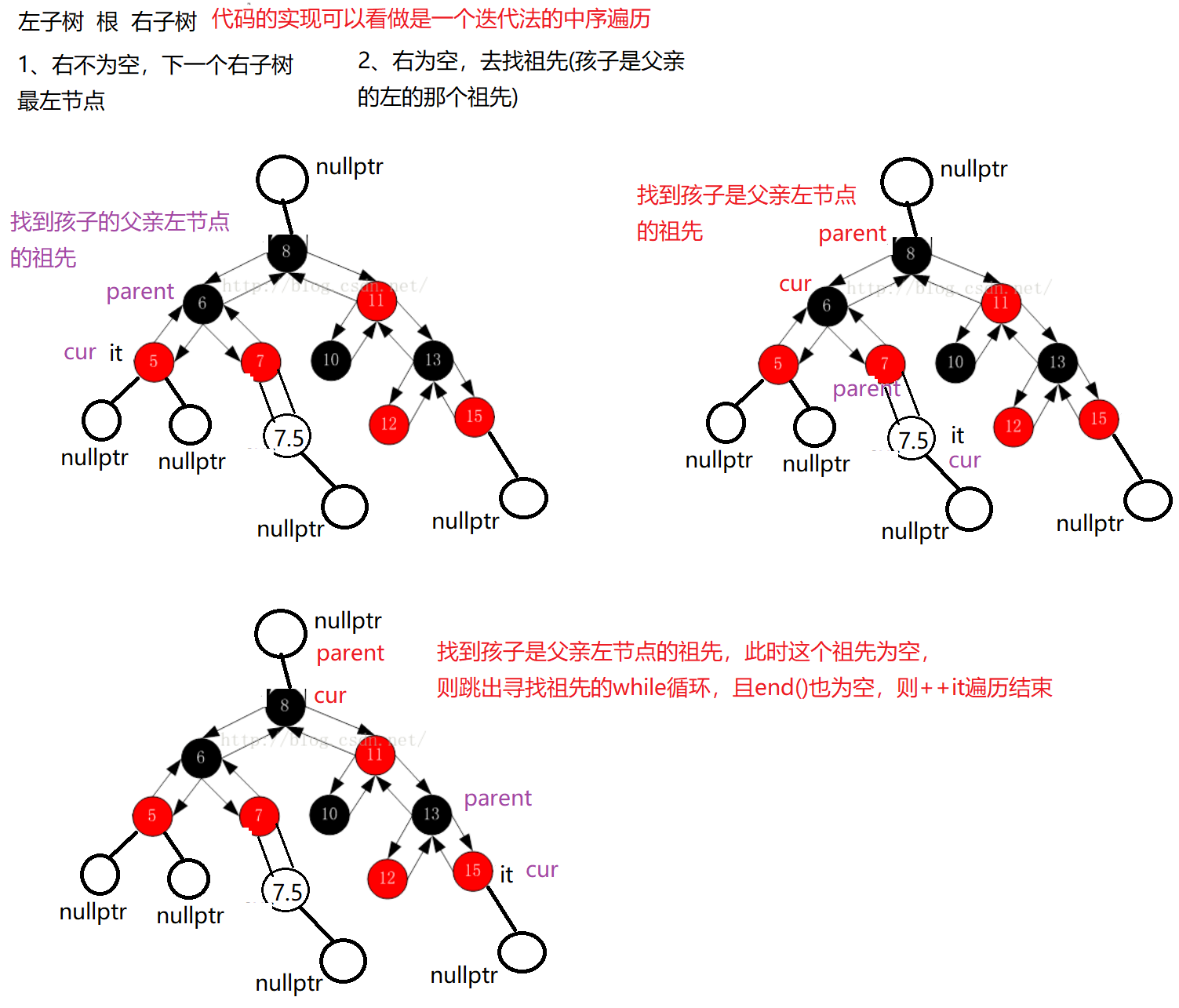
红黑树迭代器的实现
template<class T, class Ref, class Ptr>
struct __RBTreeIterator
{
typedef RBTreeNode<T> Node;
typedef __RBTreeIterator<T, Ref, Ptr> Self;
Node* _node;
__RBTreeIterator(Node* node)
:_node(node)
{}
__RBTreeIterator(const iterator& s)
:_node(s._node)
{}
T& operator*()
{
return _node->_data;
}
T* operator->()
{
return &_node->_data;
}
Self& operator++()
{
if (_node->_right)
{
Node* min = _node->_right;
while (min->_left)
{
min = min->_left;
}
_node = min;
}
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_right)
{
cur = cur->_parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
Self& operator--()
{
if (_node->_left)
{
Node* max = _node->_left;
while (max->_right)
{
max = max->_right;
}
_node = max;
}
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_left)
{
cur = cur->_parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
bool operator!=(const Self& s) const
{
return _node != s._node;
}
bool operator==(const Self& s) const
{
return _node == s._node;
}
};
红黑树insert的实现
template<class K, class V>
class map
{
struct MapKeyOfT
{
const K& operator()(const pair<const K, V>& kv)
{
return kv.first;
}
};
}
template<class K>
class set
{
struct SetKeyOfT
{
const K& operator()(const K& key)
{
return key;
}
};
}
pair<iterator, bool> Insert(const T& data)
{
if (_root == nullptr)
{
_root = new Node(data);
_root->_col = BLACK;
return make_pair(iterator(_root), true);
}
KeyOfT kot;
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
if (kot(cur->_data) < kot(data))
{
parent = cur;
cur = cur->_right;
}
else if (kot(cur->_data) > kot(data))
{
parent = cur;
cur = cur->_left;
}
else
{
return make_pair(iterator(cur), false);
}
}
cur = new Node(data);
Node* newnode = cur;
cur->_col = RED;
if (kot(parent->_data) < kot(data))
{
parent->_right = cur;
cur->_parent = parent;
}
else
{
parent->_left = cur;
cur->_parent = parent;
}
while (parent && parent->_col == RED)
{
Node* grandfater = parent->_parent;
if (parent == grandfater->_left)
{
Node* uncle = grandfater->_right;
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfater->_col = RED;
cur = grandfater;
parent = cur->_parent;
}
else
{
if (cur == parent->_left)
{
RotateR(grandfater);
parent->_col = BLACK;
grandfater->_col = RED;
}
else
{
RotateL(parent);
RotateR(grandfater);
cur->_col = BLACK;
grandfater->_col = RED;
}
break;
}
}
else
{
Node* uncle = grandfater->_left;
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfater->_col = RED;
cur = grandfater;
parent = cur->_parent;
}
else
{
if (cur == parent->_right)
{
RotateL(grandfater);
parent->_col = BLACK;
grandfater->_col = RED;
}
else
{
RotateR(parent);
RotateL(grandfater);
cur->_col = BLACK;
grandfater->_col = RED;
}
break;
}
}
}
_root->_col = BLACK;
return make_pair(iterator(newnode), true);
}
红黑树完整的模拟实现
#pragma once
enum Colour
{
RED,
BLACK,
};
template<class T>
struct RBTreeNode
{
T _data;
RBTreeNode<T>* _left;
RBTreeNode<T>* _right;
RBTreeNode<T>* _parent;
Colour _col;
RBTreeNode(const T& data)
:_data(data)
, _left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _col(RED)
{}
};
template<class T, class Ref, class Ptr>
struct __RBTreeIterator
{
typedef RBTreeNode<T> Node;
typedef __RBTreeIterator<T, Ref, Ptr> Self;
Node* _node;
__RBTreeIterator(Node* node)
:_node(node)
{}
__RBTreeIterator(const iterator& s)
:_node(s._node)
{}
Ref operator*()
{
return _node->_data;
}
Ptr operator->()
{
return &_node->_data;
}
Self& operator++()
{
if (_node->_right)
{
Node* min = _node->_right;
while (min->_left)
{
min = min->_left;
}
_node = min;
}
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_right)
{
cur = cur->_parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
Self& operator--()
{
if (_node->_left)
{
Node* max = _node->_left;
while (max->_right)
{
max = max->_right;
}
_node = max;
}
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_left)
{
cur = cur->_parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
bool operator!=(const Self& s) const
{
return _node != s._node;
}
bool operator==(const Self& s) const
{
return _node == s._node;
}
};
template<class K, class T, class KeyOfT>
class RBTree
{
typedef RBTreeNode<T> Node;
public:
typedef __RBTreeIterator<T, T& ,T*> iterator;
typedef __RBTreeIterator<T, const T&, const T*> const_iterator;
iterator begin()
{
Node* left = _root;
while (left && left->_left)
{
left = left->_left;
}
return iterator(left);
}
iterator end()
{
return iterator(nullptr);
}
const_iterator begin() const
{
Node* left = _root;
while (left && left->_left)
{
left = left->_left;
}
return const_iterator(left);
}
const_iterator end() const
{
return const_iterator(nullptr);
}
pair<iterator, bool> Insert(const T& data)
{
if (_root == nullptr)
{
_root = new Node(data);
_root->_col = BLACK;
return make_pair(iterator(_root), true);
}
KeyOfT kot;
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
if (kot(cur->_data) < kot(data))
{
parent = cur;
cur = cur->_right;
}
else if (kot(cur->_data) > kot(data))
{
parent = cur;
cur = cur->_left;
}
else
{
return make_pair(iterator(cur), false);
}
}
cur = new Node(data);
Node* newnode = cur;
cur->_col = RED;
if (kot(parent->_data) < kot(data))
{
parent->_right = cur;
cur->_parent = parent;
}
else
{
parent->_left = cur;
cur->_parent = parent;
}
while (parent && parent->_col == RED)
{
Node* grandfater = parent->_parent;
if (parent == grandfater->_left)
{
Node* uncle = grandfater->_right;
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfater->_col = RED;
cur = grandfater;
parent = cur->_parent;
}
else
{
if (cur == parent->_left)
{
RotateR(grandfater);
parent->_col = BLACK;
grandfater->_col = RED;
}
else
{
RotateL(parent);
RotateR(grandfater);
cur->_col = BLACK;
grandfater->_col = RED;
}
break;
}
}
else
{
Node* uncle = grandfater->_left;
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfater->_col = RED;
cur = grandfater;
parent = cur->_parent;
}
else
{
if (cur == parent->_right)
{
RotateL(grandfater);
parent->_col = BLACK;
grandfater->_col = RED;
}
else
{
RotateR(parent);
RotateL(grandfater);
cur->_col = BLACK;
grandfater->_col = RED;
}
break;
}
}
}
_root->_col = BLACK;
return make_pair(iterator(newnode), true);
}
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
parent->_right = subRL;
if (subRL)
subRL->_parent = parent;
Node* ppNode = parent->_parent;
subR->_left = parent;
parent->_parent = subR;
if (ppNode == nullptr)
{
_root = subR;
_root->_parent = nullptr;
}
else
{
if (ppNode->_left == parent)
{
ppNode->_left = subR;
}
else
{
ppNode->_right = subR;
}
subR->_parent = ppNode;
}
}
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
parent->_left = subLR;
if (subLR)
{
subLR->_parent = parent;
}
Node* ppNode = parent->_parent;
subL->_right = parent;
parent->_parent = subL;
if (ppNode == nullptr)
{
_root = subL;
_root->_parent = nullptr;
}
else
{
if (ppNode->_left == parent)
{
ppNode->_left = subL;
}
else
{
ppNode->_right = subL;
}
subL->_parent = ppNode;
}
}
void Inorder()
{
_Inorder(_root);
}
void _Inorder(Node* root)
{
if (root == nullptr)
return;
_Inorder(root->_left);
cout << root->_kv.first << ":" << root->_kv.second << endl;
_Inorder(root->_right);
}
bool Check(Node* root, int blackNum, const int ref)
{
if (root == nullptr)
{
if (blackNum != ref)
{
cout << "违反规则:本条路径的黑色节点的数量跟最左路径不相等" << endl;
return false;
}
return true;
}
if (root->_col == RED && root->_parent->_col == RED)
{
cout << "违反规则:出现连续红色节点" << endl;
return false;
}
if (root->_col == BLACK)
{
++blackNum;
}
return Check(root->_left, blackNum, ref)
&& Check(root->_right, blackNum, ref);
}
bool IsBalance()
{
if (_root == nullptr)
{
return true;
}
if (_root->_col != BLACK)
{
return false;
}
int ref = 0;
Node* left = _root;
while (left)
{
if (left->_col == BLACK)
{
++ref;
}
left = left->_left;
}
return Check(_root, 0, ref);
}
private:
Node* _root = nullptr;
};
2.map的实现
#include "RBTree.h"
namespace qwy
{
template<class K, class V>
class map
{
struct MapKeyOfT
{
const K& operator()(const pair<const K, V>& kv)
{
return kv.first;
}
};
public:
typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::iterator iterator;
typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::const_iterator const_iterator;
iterator begin()
{
return _t.begin();
}
iterator end()
{
return _t.end();
}
const_iterator begin() const
{
return _t.begin();
}
const_iterator end() const
{
return _t.end();
}
pair<iterator, bool> insert(const pair<const K, V>& kv)
{
return _t.Insert(kv);
}
V& operator[](const K& key)
{
pair<iterator, bool> ret = insert(make_pair(key, V()));
return ret.first->second;
}
private:
RBTree<K, pair<const K, V>, MapKeyOfT> _t;
};
void test_map()
{
int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };
map<int, int> m;
for (auto e : a)
{
m.insert(make_pair(e, e));
}
map<string, int> countMap;
string arr[] = { "苹果", "西瓜", "香蕉", "草莓", "苹果", "西瓜", "苹果", "苹果", "西瓜", "苹果", "香蕉", "苹果", "香蕉" };
for (auto& e : arr)
{
countMap[e]++;
}
for (auto& kv : countMap)
{
cout << kv.first << ":" << kv.second << endl;
}
}
}
3.set的实现
#pragma once
#include "RBTree.h"
namespace qwy
{
template<class K>
class set
{
struct SetKeyOfT
{
const K& operator()(const K& key)
{
return key;
}
};
public:
typedef typename RBTree<K, K, SetKeyOfT>::const_iterator iterator;
typedef typename RBTree<K, K, SetKeyOfT>::const_iterator const_iterator;
iterator begin() const
{
return _t.begin();
}
iterator end() const
{
return _t.end();
}
pair<iterator, bool> insert(const K& key)
{
pair<typename RBTree<K, K, SetKeyOfT>::iterator, bool> ret = _t.Insert(key);
return pair<iterator, bool>(ret.first, ret.second);
}
private:
RBTree<K, K, SetKeyOfT> _t;
};
void test_set()
{
int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };
set<int> s;
for (auto e : a)
{
s.insert(e);
}
set<int>::iterator it = s.begin();
while (it != s.end())
{
cout << *it << " ";
++it;
}
cout << endl;
for (auto e : s)
{
cout << e << " ";
}
cout << endl;
}
}






















 158
158











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









